В основном авт. св. Л 156426 описано устройство для контроля нутевы.х положений рабочих органов механизмов, содержащее последовательно включенные балластное сопротивление и индуктивный датчик, неремещающийся относительно датчнка ферромагнитный якорь, жестко связанный с контролируемым рабочим органом, и вторичную схему.
Предлагаемое устройство отлнчается от известиого тем, что в нем нараллельно балластному сопротивлению включен регулнруемый элемент, управляемый сигналом с индуктивного датчнка, а также тем, что в качестве регулируемого элемента использован дроссель насыщения.
Это нозволяет увеличить точность и надежность работы устройства.
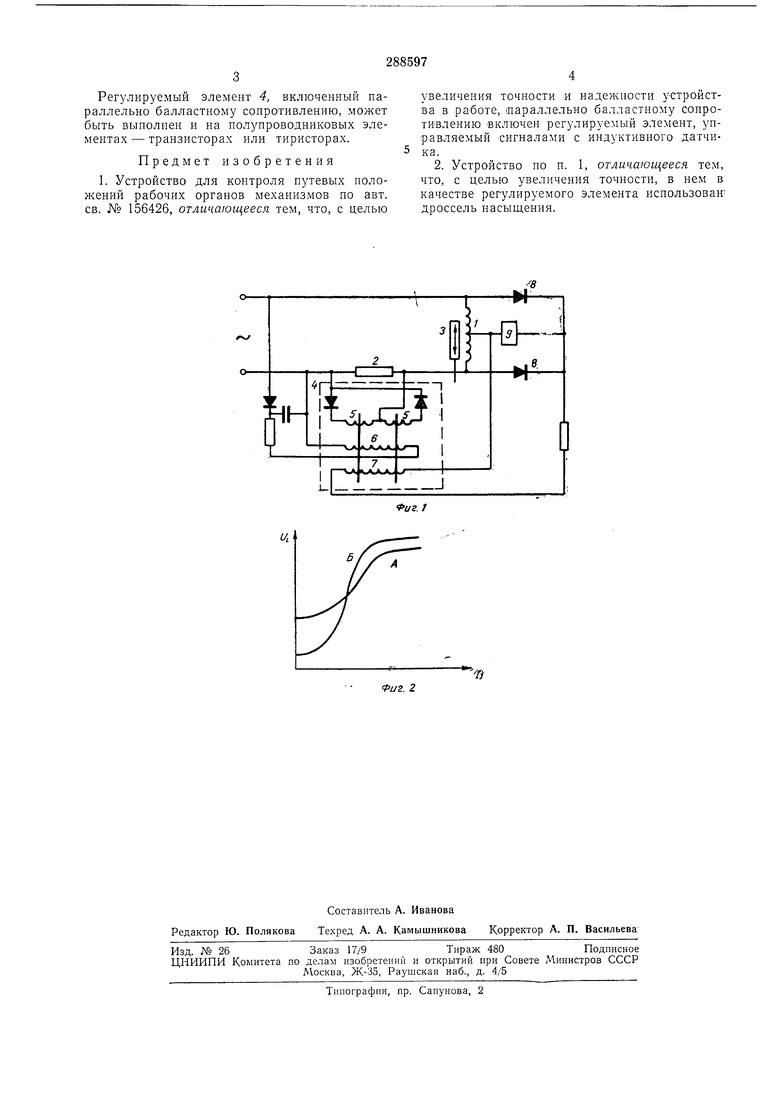
Па фиг. 1 изображена электрическая схема онисываемого устройства, на фиг. 2 - графики изменения сигнала с индуктивного датчика (А - с балластным сопротивлением, Б - с балластным сопротивление.м и дросселем насыщения).
Устройство состоит из индуктивного датчика 1, балластного сопротивления 2, перемещающегося якоря 3, дросселя насыщения (регулируемый элемент) 4. Последний выполнен с внутренней положительной обратной связью и имеет рабочие обмотки 5, обмотку смещения 6 и обмотку управления 7. Сигнал с индуктивного датчика 1 через выпрямительные дподы 8 поступает на исполнительное реле 9. Прн больщом возд;ущном зазоре между датч 1ком У и якорем 5 дроссель насыщения 4 закрыт. Его рабочая точка устанавливается током, проходящим по обмотке с.мещения 6. При этом нанряженпе, снимаемое с индуктивного датчика /, небольщое. С уменьщеннем воздушного зазора индуктивность датчика /,
напряжение на обмотке исполнительного реле 9 и ток через обмотку управления 7 увеличиваются, что приводит к уменьшению сонротизлепня дросселя насыщения 4. Увеличенне тока, проходящего через дроссель насыщения 4
II датчик 1, приводит к тому, что увеличивается напряжение с датчика 1, а следовательно, и ироходящий через него ток, т. е. напряжение на обмотке нсполнительного реле 9 резко нарастает при уменьщении воздущного зазора. При добавленни обмотки внещней иоложительной обратной связи напряжение на обмотке исполнительного реле 9 будет изменяться релейно. Пз-за больщой крутизны и кратности изменения сигнала с датчика точка срабатывания
Нсполннтельного реле 9 изменяется крайне
незначителыю нрп колебанпи напряжения и
частоты пнтающей сети.
Регулируемый элемент 4, включенный параллельно балластному сонротивлению, может быть выполнен и на полупроводниковых элементах - транзисторах или тиристорах.
Предмет изобретения
1. Устройство для контроля путевых положений рабочих органов механизмов по авт. св. № 156426, отличающееся тем, что, с целью
увеличения точности и надежности устройства в .работе, параллельно балластному сопротивлению включен регулируемый элемент, управляемый сигналами с индуктивного датчика.
2. Устройство по п. 1, отличающееся тем, что, с целью увеличения точности, в нем в качестве регулируемого элемента использовандроссель насыщения.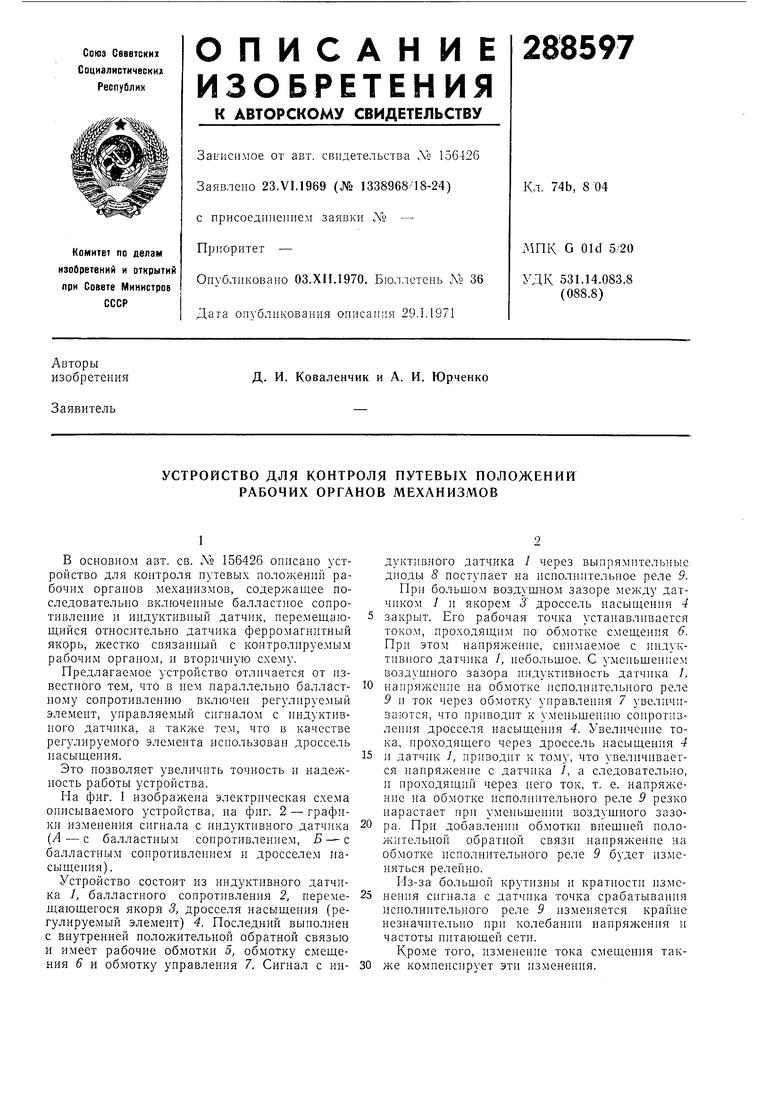
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ БЕССТУНЕНЧАТОЙ ТРАСМИССИЕЙ САМОХОДНОЙ МАШИНЫ | 1973 |
|
SU389968A1 |
| Устройство для контроля положения рабочих органов механизмов | 1977 |
|
SU684580A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПУТЕВЫХ ПОЛОЖЕНИЙ РАБОЧИХ ОРГАНОВ МЕХАНИЗМОВ | 1973 |
|
SU381894A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПОЛОЖЕНИЙ РАБОЧИХ ОРГАНОВ МЕХАНИЗМОВ | 1972 |
|
SU357526A1 |
| СПОСОБ БЕСКОНТАКТНОГО РЕГУЛИРОВАНИЯ | 1964 |
|
SU166962A1 |
| Устройство для контроля положений рабочих органов механизмов | 1976 |
|
SU601732A2 |
| Устройство для измерения сопротивления изоляции электрических цепей | 1981 |
|
SU993166A2 |
| УСТРОЙСТВО для КОНТРОЛЯ ПУТЕВЫХ ПОЛОЖЕНИЙ РАБОЧИХ ОРГАНОВ МЕХАНИЗМОВ | 1970 |
|
SU283860A1 |
| УСТРОЙСТВО для КОНТРОЛЯ nVTEBbiX ПОЛОЖЕНИЙ РАБОЧИХ ОРГАНОВ Л\ЕХАНИЗЛ\ОВ | 1971 |
|
SU289433A1 |
| Устройство для контроля положения механизма | 1976 |
|
SU602973A1 |
UL
