В основном авт. св. jVo 170349 описан трансформаторный дифференциальный датчик угла, содержащий тре.хстержневой магнитопровод (статор) с расположенными на нем обмоткамн возбуждения и выходными обмотками и ротор в виде шарового сегмента.
Предлагаемый датчик отличается тем, что в нем на крайних стержнях магнитопровода расположены две дополнительные обмотки, соединенные между собой последовательно и встречно. Один из выходов дополнительных обмоток подключен к регулируемому источнику синфазного напряжения или тока, а другой-к регулируемому источннку квадратурного напряжения или тока. Это позволяет компенсировать синфазное и квадратурное напряжения выходного сигнала датчика при определенном взаимном расположении его ротора и статора, в том числе и остаточного напряжения при симметричном расположении ротори относительно статора.
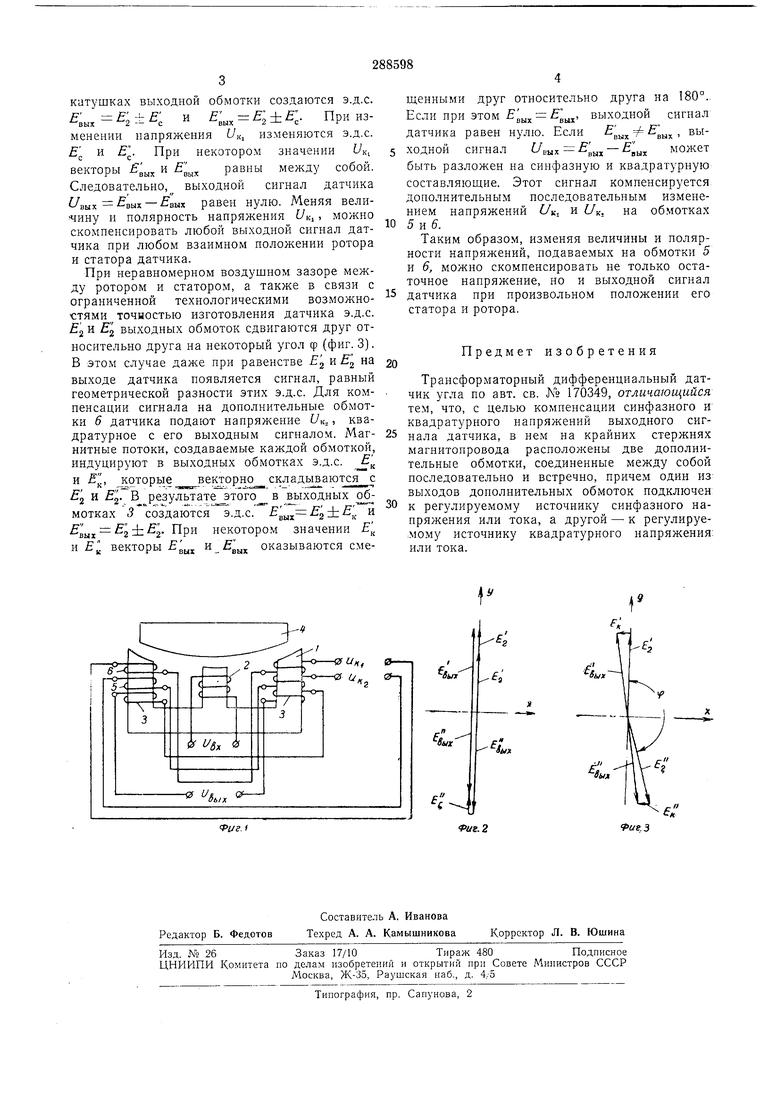
На фиг. 1 изображена схема датчика угла; на фиг. 2 - векторная диаграмма компенсации синфазной составляющей выходного сигнала; на фиг. 3 - векторная диаграмма компенсации квадратурной составляющей выходного сигнала.
мотка возбуждения 2, подключенная к источннку напряжения t/gx - т вх sin ш;, а на крайних стержнях - выходные обмотки 3 и ротор 4. Кроме того, на крайних стержнях сердечника расположены дополннтельные обмотки 5 и 6. Каждая дополнительная обмотка одного из стержней последовательно и встречно соединена с соответствующей ей дополнительной обмоткой другого стержня. Выход обмоток 5 нодключен к источнику сигнала синфазной коррекции t/Ki /Ci sii --i а выход обмоток 6 - к источннку сигналов квадратурной коррекции бк, /Гз-Ь твх-COS№.
Принцип работы устройства заключается в следующем.
При нодключении обмотки возбуждения 2 к источнику иитания UBX во вторичных оби 1
2
мотках
индуцируются э.д.с.
(фиг. 2), которые при некотором произвольном положеннн ротора 4 могут быть не равны друг другу. В этом случае выходной сигнал Датчнка равен разности Е -Е. Для компенсации этого сигнала на дополнительные обмотки 5 датчпка подают напряжение бк, , синфазное с выходным сигналом датчика. Магнитные потоки, создаваемые каждой обмоткой, индуцируют во вторичных обмотках датчика э.д.с. Е и Е , которые векторно складываются с Е и Е . В результате на
катушках выходной обмотки создаются э.д.с. Bb, и El El±El. При изменении напряжения УК, изменяются э.д.с.
При некотором значении VK
;
Б и векторы з„ и Е равны между собой. Следовательно, выходной сигнал датчика вых вых равен нулю. Меняя величину и полярность напряжения UK , можно скомпенсировать любой выходной сигнал датчика при любом взаимном положении ротора и статора датчика.
При неравномерном воздушном зазоре между ротором и статором, а также в связи с ограниченной технологическими возможностями точностью изготовления датчика э.д.с. Е и 2 выходных обмоток сдвигаются друг относительно друга на некоторый угол ф (фиг. 3). В этом случае даже при равенстве Е и Е на выходе датчика появляется сигнал, равный геометрической разности этих э.д.с. Для компенсации сигнала на дополнительные обмотки 6 датчика подают напряжение UK, , квадратурное с его выходным сигналом. Магнитные потоки, создаваемые каждой обмоткой, индуцируют в выходных обмотках э.д.с. „ и Е , которые векторно складываются с 2 и Е . В результате этого в вь1ходных об мотках 5 создаются э.д.с. i к вы1 - Р некотором значении Е и векторы fgyj . оказываются смещенными друг относительно друга на 180°.Если при этом вых ВЫХОДНОЙ сигнал датчика равен нулю. Если вых вых
ходной сигнал вых может быть разложен на синфазную и квадратурную составляющие. Этот сигнал компенсируется дополнительным последовательным изменением напряжений UK, и UK. на обмотках
5 тлб.
Таким образом, изменяя величины и полярности напряжений, подаваемых на обмотки 5 и 6, можно скомпенсировать не только остаточное напряжение, но и выходной сигнал
датчика при произвольном положении его статора и ротора.
Предмет изобретения
Трансформаторный дифференциальный датчик угла по авт. св. Л 170349, отличающийся тем, что, с целью компенсации синфазного и квадратурного напряжений выходного сигнала датчика, в нем на крайних стержнях магнитопровода расположены две дополнительные обмотки, соединенные между собой последовательно и встречно, причем один из выходов дополнительных обмоток подключен к регулируемому источнику синфазного напряжения или тока, а другой - к регулируелюму источнику квадратурного напряжения: или тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1702492A1 |
| Бесконтактный вращающийся трансформатор | 1970 |
|
SU780108A1 |
| Двухотсчетный вращающийся трансформатор | 1982 |
|
SU1034130A1 |
| Многополюсный вращающийся трансформатор | 1981 |
|
SU1001343A1 |
| Двухканальный бесконтактный датчик угловых перемещений | 1985 |
|
SU1310623A2 |
| Многополюсный преобразователь угла поворота вала в фазу электрического сигнала | 1981 |
|
SU998863A1 |
| Двухотсчетный вращающийся трансформатор | 1974 |
|
SU535674A1 |
| ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1970 |
|
SU275791A1 |
| Двухотсчетный бесконтактный индукционный датчик угла | 1987 |
|
SU1566448A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1992 |
|
RU2046514C1 |
