Изобретение относится к электротехнике, в частности к индукционным датчикам угла электромашинного типа Целью изобретения является повышение точности.
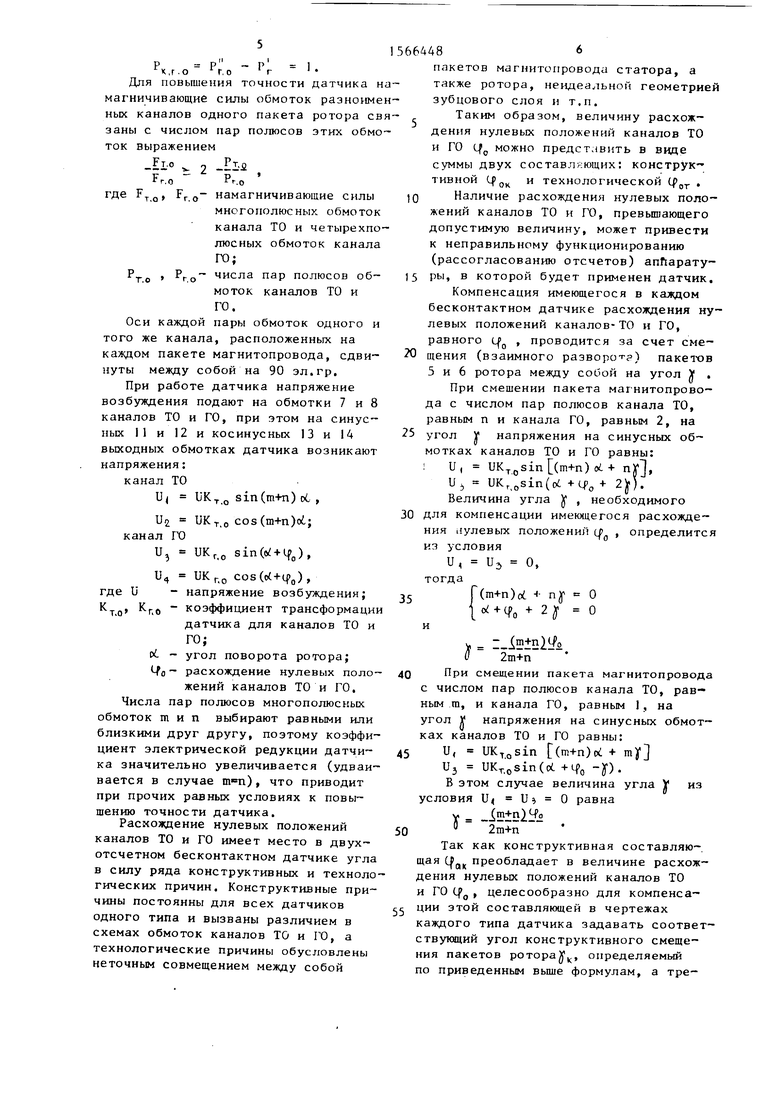
На фиг.1 схематически представлен конструкция двухотсчетного бескон- тактного индукционного датчика угла; на фиг.2 - электрическая схема датчика.
В статорной обойме (корпусе) 1 расположены пакеты 2 и 3 магнитопро- вода статора, а на роторной обойме (валу) 4 - пакеты 5 и 6 ротора. Пакет 2 статора и расположенный в его расточке пакет 5 ротора с обмотками составляют первый, а пакет 3 статора и расположенный в его расточке пакет 6 ротора с обмотками - второй вращающийся трансформатор (ВТ) в каскадной схеме датчика.
В общих пазах статора уложены обмотки возбуждения 7 и 8, а также квадратурные обмотки 9 и 10 соответственно каналов точного (ТО) и грубого (ГО) отсчетов. Обмотки 7 и 9 ка нала ТО - многополюсные с числом пар полюсов, равным т, а обмотки 8 и 10 канала ГО - двухполюсные (с числом пар полюсов, равным 1).
В общих пазах пакета 3 статора уложены синусные 11 и 12, а также косинусные 13 и 14 выходные обмотки каналов ТО и ГО соответственно. Обмотки 11 и 13 канала ТО - многополюсные с числом пар полюсов, равным
п, а обмотки 12 и 14 канала ГО выполнены четырехполюсными (с числом пар полюсов, равным 2). Пакеты 2 и 3 статора установлены в обойме (корпусе) 1 таким образом, что их первые 55 пазы совмещены.
1
В общих пазах пакета ротора 5 уложены обмотки 15 и 16 канала ТО с числом
0
5
30
40
35
45
50
55
пар полюсов, равным т, и двухполюсные обмотки 17 и 18 канала ГО. В общих пазах пакета 6 ротора уложены обмотки 19 и 20/канала ТО с числом пар полюсов- равным п, обмотки 21 и 22 канала ГО с числом пар полюсов, равным двум.
Обмотки 15, 16 и 19, 20 ротора канала ТО, расположенные на пакетах 5 и 6 магнитопровода, попарно замкнуты между собой. Если замкнуты разно-. именные обмотки 15 и 20, 16 и 19, то в одной паре замкнутых обмоток (например, 15 и 20) они соединены разноименными концами, а в другой (например, 16 и 19) - одноименными. Если замкнуты одноименные обмотки 15 и 19, 16 и 20, то обе пары замкнутых обмоток соединены одноименными концами. При двух перечисленных видах соединения обмоток коэффициент электрической редукции канала ТО датчика равен сумме чисел пар полюсов двух ВТ в каскадной схеме датчика:
Р,т.о Р г,о + m + п.
Обмотки 17, 18 и 21, 22 ротора канала ГО, расположенные на пакетах магнитопровода 5 и 6, попарно замкнуты между собой. Если замкнуты одноименные обмотки 17 и 21, 18 и 22, то в одной паре замкнутых обмоток (например, 17 и 21) они соединены разноименными концами, а в другой (например, 18 и 22) - одноименными. Если замкнуты разноименные обмотки 17 и 22, 18. и 21, то обе пары замкнутых обмоток соединены одноименными концами.
При двух перечисленных видах соединений обмоток коэффициент электрической редукции канала ТО датчика равен разности чисел пар полюсов двух ВТ в каскадной схеме датчика:
р р - р
гк,г.о гг,о г Для повышения точности датчика нмагничивающие силы обмоток разноименых каналов одного пакета ротора свзаны с числом пар полюсов этих обмоток выражением
El-° 2 -« Я
с - р
С r..О
где FTO, Fr 0 намагничивающие силы многополюсных обмоток канала ТО и четырехпо люсных обмоток канала ГО;
РТО , Рго числа пар полюсов обмоток каналов ТО и ГО.
Оси каждой пары обмоток одного и того же канала, расположенных на каждом пакете магнитопровода, сдвинуты между собой на 90 эл.гр.
При работе датчика напряжение возбуждения подают на обмотки 7 и 8 каналов ТО и ГО, при этом на синусных II и 12 и косинусных 13 и 14 выходных обмотках датчика возникают напряжения: канал ТО
U( UKTo sin(m+n)ot ,
Ug UK-,-.,, cos (m+n)oi; канал ГО
U3 UKr,0 + ),
U4 UKno cos(c( + ), где U - напряжение возбуждения; KTQ, Kro - коэффициент трансформации датчика для каналов ТО и ГО;
сЈ - угол поворота ротора; t-fo - расхождение нулевых положений каналов ТО и ГО. Числа пар полюсов многополюскых обмоток тип выбирают равными или близкими друг другу, поэтому коэффициент электрической редукции датчика значительно увеличивается (удваивается в случае твп), что приводит при прочих равных условиях к повышению точности датчика.
Расхождение нулевых положений каналов ТО и ГО имеет место в двух- отсчетном бесконтактном датчике угла в силу ряда конструктивных и технологических причин. Конструктивные причины постоянны для всех датчиков одного типа и вызваны различием в схемах обмоток каналов ТО и ГО, а технологические причины обусловлены неточным совмещением между собой
5
664486
пакетов магнитопровода статора, а также ротора, неидеальной геометрией зубцового слоя и т.п.
Таким образом, величину расхождения нулевых положений каналов ТО и ГО (f0 можно представить в виде суммы двух составляющих: конструктивной Ц ок и технологической Срог . JQНаличие расхождения нулевых положений каналов ТО и ГО, превышающего допустимую величину, может привести к неправильному функционированию (рассогласованию отсчетов) аппарату- 15 Pbi, в которой будет применен датчик.
Компенсация имеющегося в каждом бесконтактном датчике расхождения нулевых положений каналов-ТО и ГО, равного , проводится за счет сме- 20 щения (взаимного раэворот) пакетов 5 и 6 ротора между собой на угол X1 . При смешении пакета магнитопровода с числом пар полюсов канала ТО, равным п и канала ГО, равным 2, на 25 угол У напряжения на синусных обмотках каналов ТО и ГО равны: U, UKT0sin(m+n)oi+ njf, U3 UKr%0sin(oi + 2Jf). Величина угла , необходимого 30 для компенсации имеющегося расхождения нулевых положений (р , определится из условия
U, иэ О, тогда
35Г(т+п) + О
(ta + 2Ј 0 и
I i5 ±Slifo 2т+п
40 При смещении пакета магнитопровода с числом пар полюсов канала ТО, равным т, и канала ГО, равным 1, на угол V напряжения на синусных обмотках каналов ТО и ГО равны: 45 U, UKTosin (т+пК + mf U3 UKT.0sin(ct -У)- В этом случае величина угла у из условия U 1)э 0 равна
Y il }iDli Ј
0 2т+п
Так как конструктивная составляющая (ра(( преобладает в величине расхождения нулевых положений каналов ТО и ГО (0 , целесообразно для компенсас ции этой составляющей в чертежах
каждого типа датчика задавать соответствующий угол конструктивного смещения пакетов роторау, определяемый по приведенным выше формулам, а тре
буемый для полной компенсации имеюще гося в каждом датчике расхождения срв дополнительный технологический разворот пакетов ротора jf устанавливать для каждого датчика экспериментально например путем измерения величины выходного напряжения, пропорционального величине расхождения, на синусной обмотке 11 канала ТО при подаче напряжения на обмотки 7 и 8 и предварительной установке ротора относительно статора в положение, при котором напряжение на синусной обмотке 12 канала ГО равно нулю.
На практике преобладают конструктивные исполнения датчиков, в которых магнитопровод статора имеет прямые пазы, а ротор имеет скошенные пазы. При прямом пазе не представля- ет особых технологических трудностей совмещение соответствующих пазов, расположенных на отдельных пакетах. Необходимое взаимное расположение пакетов со скошенными пазами получают с большой погрешностью, что фактически, определяет величину технологической составляющей Cf от расхождения нулевых положений каналов ТО и ГО.
Если скос пазов у датчика выполнен не на роторе, а на статоре, технологически целесообразно совмещать пазы на роторе, для получения минимального расхождения нулевых поло- жений каналов ТО и ГО устанавливать с соответствующим угловым смещением пакеты статора.
В общих пазах каждого пакета маг- нитопровода датчика уложены обмотки каналов ТО и ГО. Между обмотками разных каналов имеется паразитное по токосцепление, снижающее точность работы датчика. Это потокосцепление обусловлено наличием технологических дефектов, а также наличием в НС обмоток каналов ТО и ГО общих пространственных гармоник. Влияние магнитног поля обмоток каналов ГО на точность канала ТО отсутствует, если намагни- чивающие силы обмоток разноименных каналов одного пакета ротора связаны с числом пар полюсов этих обмоток указанным выше выражением. При этом повышается точность канала ТО, а значит, и точность датчика в целом. Формула изобретени I.ДвуЛотсчетный бесконтактный индукционный датчик угла, содержащий
установленные в общие обоймы по два пакета магнитопровода статора и ротора, причем в расточке каждого пакета статора размещен один из пакетов ротора, в общих пазах каждого из пакетов статора и ротора расположены гто две входные и выходные взаимно перпендикулярные многополюсные обмотки канала точного отсчета и две взаимно перпендикулярные обмотки канала грубого отсчета, обмотки од поименных каналов разных пакетов ротора попарно замкнуты друг на друга, обмотки канала грубого отсчета одного из пакетов статора и расположенного в его расточке пакета ротора выполнены двухполюсными, о т л и - чающийс я тем, что, с целью повышения точности, обмотки канала грубого отсчета другого пакета статора и расположенного в его расточке пакета ротора выполнены четырехпо- люсными, входные обмотки расположены на одном пакете статора, а выходные - на другом, между собой замкнуты одноименные обмотки ротора канала точного отсчета, причем обе пары замкнутых обмоток соединены одноименными концами, или между собой замкнуты разноименные обмотки ротора канала точного отсчета, причем в одной паре замкнутых обмоток они соединены разноименными концами, а в другой - одноименными, пакеты ротора установлены с угловым смещением у определяемым в соответствии с выражением
у.
О 2m + n где т, n - числа пар полюсов обмоток
канала точного отсчета; Ср0 - величина расхождения нулевых положений каналов точного и грубого отсчетов, определенная при совмещенном положении пакетов статора и ротора. 2,Датчик поп.1, отличающийся тем, что намагничивающие силы обмоток разноименных каналов одного пакета ротора связаны с числом пар полюсов этих обмоток выражением
FT.o ,. 2 Xi°
Fr.o Pr,o где FTO, Fro- намагничивающие силы
МНОГОПОЛЮСНЫХ
канала точного отсчета
и четырехполюсник обмоток канала грубого от™ счета;
10
р , РГо числа пар полюсов обмоток каналов точного и грубого отсчетов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный вращающийся трансформатор | 1982 |
|
SU1034130A1 |
| Двухотсчетный вращающийся трансформатор | 1983 |
|
SU1275675A1 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1234927A1 |
| Двухканальный вращающийся трансформатор | 1978 |
|
SU726631A1 |
| Двухканальный индукционный датчик угла | 1985 |
|
SU1316068A1 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1312696A1 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1265932A1 |
| Многополюсный синусно-косинусный вращающийся трансформатор | 1983 |
|
SU1141524A2 |
| Двухканальный вращающийся трансформатор | 1990 |
|
SU1713037A1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1065978A1 |
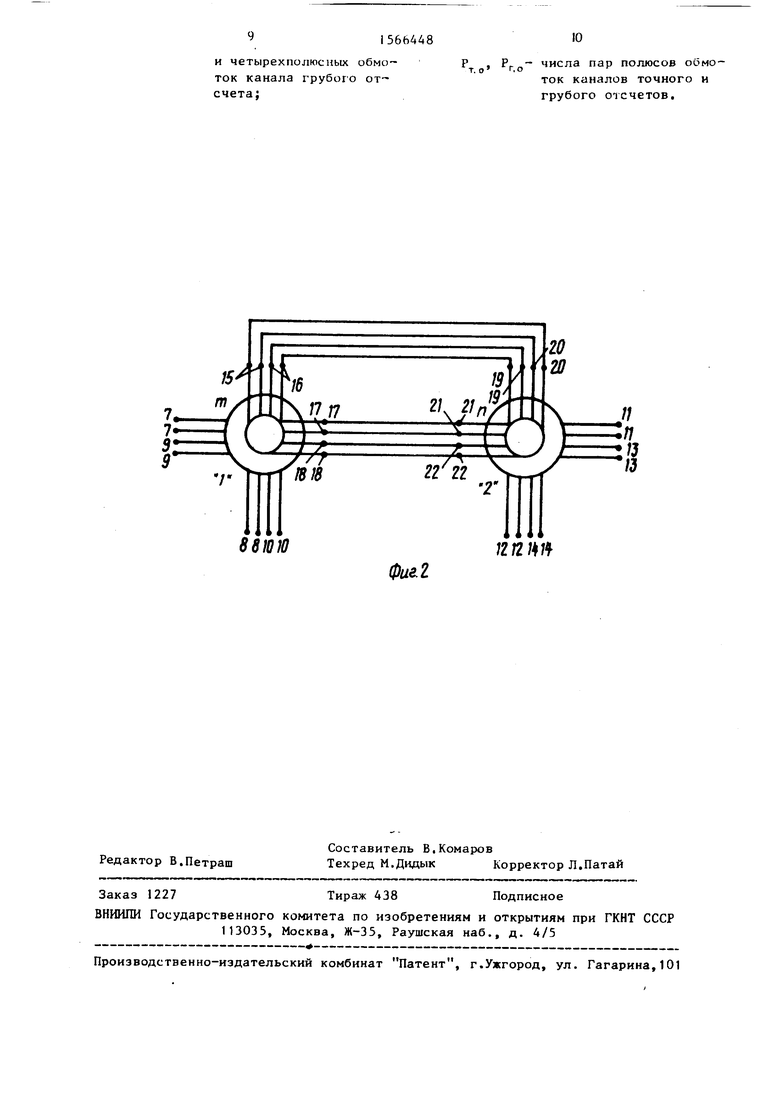
Изобретение относится к электротехнике, в частности к индукционным датчикам угла электромашинного типа. Целью изобретения является повышение точности. Двухотсчетный бесконтактный индукционный датчик угла содержит по два пакета 2,3 магнитопровода статора и ротора с многополюсными обмотками 7,9,11,13 канала точного отсчета (ТО) и обмотками 8,10,12,14 канала грубого отсчета (ГО), уложенными в общих пазах каждого из пакетов. Обмотки пакетов ротора каждого канала попарно соединены между собой. Пазы пакетов статора совмещены, а пакеты ротора установлены с угловым смещением между ними из условия минимального расхождения нулевых положений каналов ТО и ГО. Отношение входных и выходных сопротивлений обмоток ротора каждого канала, расположенных на втором и первом пакетах магнитопровода соответственно, выбрано для данного габарита датчика максимально возможным. Соотношение намагничивающих сил обмоток возбуждения каналов ТО и ГО для каждого пакета магнитопровода должно удовлетворять условие Fто/Fго≥2(Pто/Pго), где Pто и Pго - число пар полюсов соответствующего пакета магнитопровода с обмотками каналов ТО и ГО соответственно. 1 з.п. ф-лы, 2 ил.
88ЮЮ
Редактор В.Петраш
Составитель В.Комаров
Техред М.Дидык Корректор Л.Патай
Заказ 1227
Тираж 438
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
21п
«JZJW
Подписное
| ДВУХКАНАЛЬНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 0 |
|
SU366345A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двухотсчетный вращающийся трансформатор | 1982 |
|
SU1034130A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
