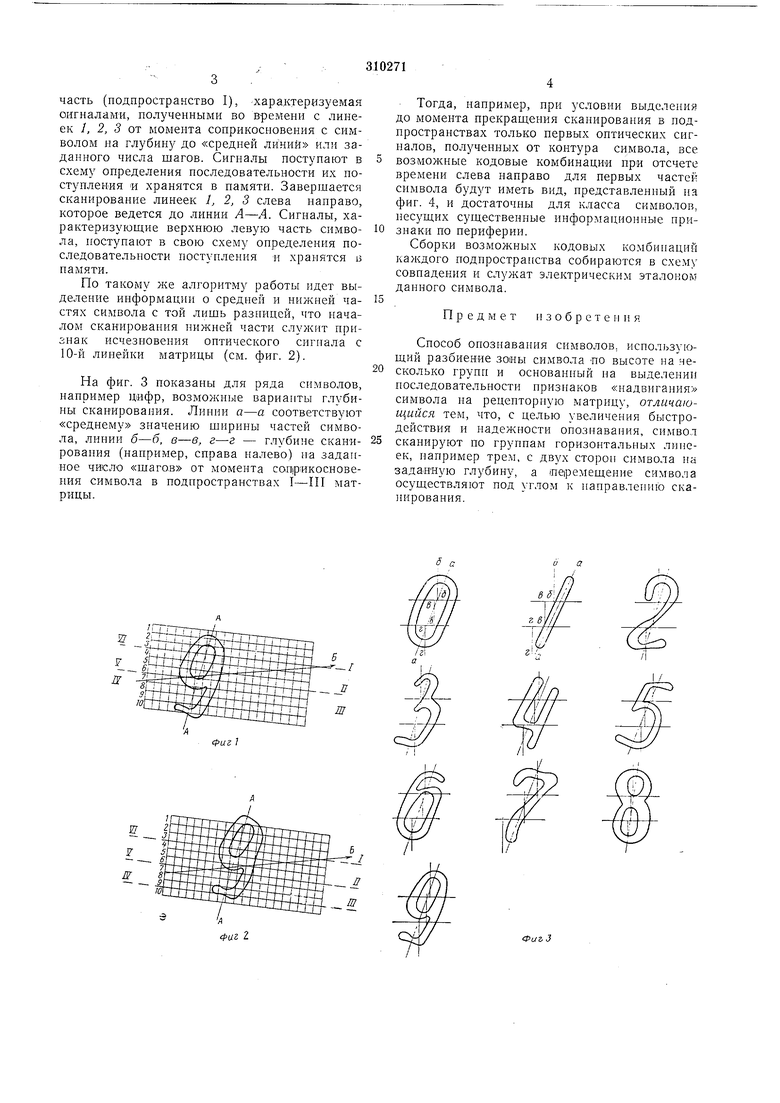
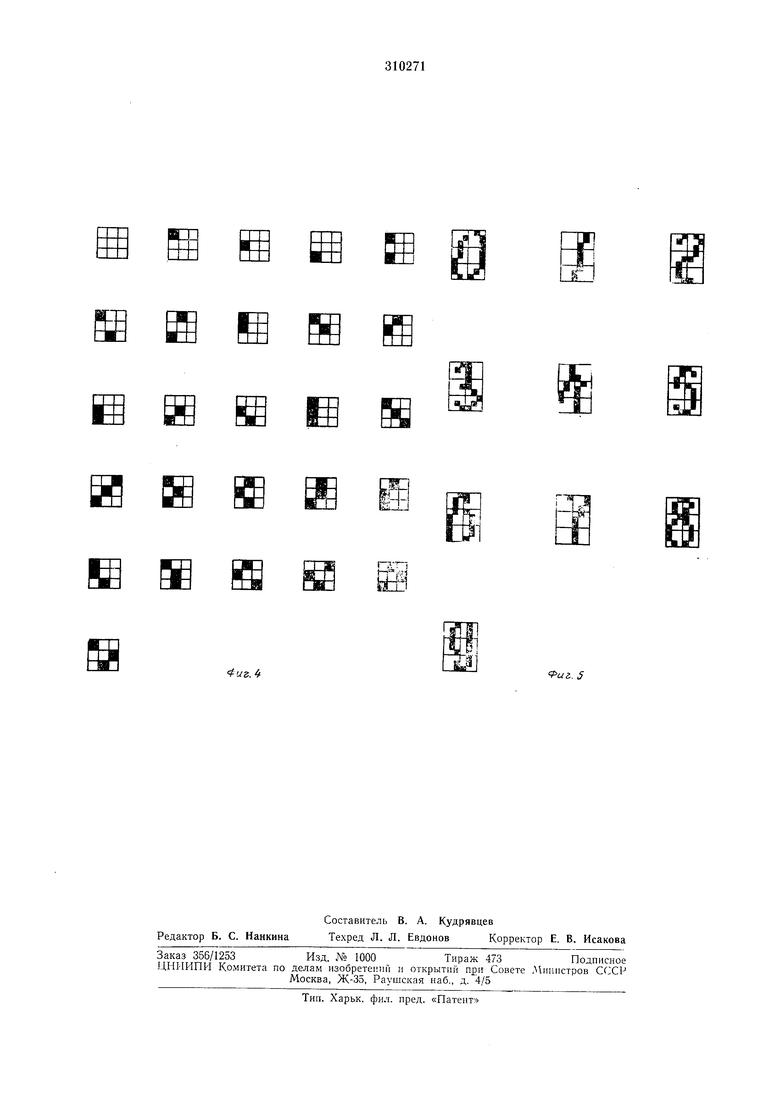
Изобретение относится к классу самонастраивающихся и обучаемых систем, технической кибернетики, а именно к устройствам для опознавания символов. Известны способы распознавания символов по очертаниям контура использующие разбие:яие зоны символ а по высоте на несколько .грулн и основанные на выделении последовательности признаком «надвигания символа на рецепторлую матрицу. Недостатком этих опосо,бов является сложность процесса масштабирования, требующего применения в системах опознавания логико-математических устройств, либо, при использовании специальных сканирующих разверток, исключающих процедуру масщтабирования, - сложность в обеспечении перемещения символа относительно системы восприятия. Целью изобретения является обеспечение более простой механической системы ввода документов, снижение требований к масщтабному написанию знаков в документах, сокращение оборудования идентифицирования символов с электрическими эталонами, что позволяет получить высокую скорость опознавания. мещение символа осуществляют под углом к направлению сканирования. На фиг. 1 и 2 показано деление символа по средней линии Л-Л на подпространстве I-VI и выделение признаков начала (фиг. 1) и конца (фиг. 2) сканирования частей символа с разложением его .на по стояиное число строк; на фиг. 3 - возмол ные варианты глубины сканирования для различных символов; ла фиг. 4 представлены возможные кодовые комбинации нри отсчете времени слева направо для первых частей символов, показанных на фиг. 3; на фиг. 5 показан пример идентификации конкретных цифровых символов по совокупности кодовых комбинаций в подпространствах. Рассмотрим последовательность процесса опознавания. При движении символа относительно матрицы по стрелке 5 и сканировании символа одновременно по всем линейкам матрицы,например справа налево началом перехода к определению характера начертаний частей символа служит сигнал, полученный в результате обнаружения признаков символа в подпространствах I-ГП при сквозном их сканировании и сигнала с линейки 7 (см. фиг. 1). При этом сканирование матрицы справа налево повторяется, но анализу очертаний символа подвергается только его правая верхняя
часть (подпространство I), характеризуемая оигпалами, полученными во времени с линеек /, 2, 3 от момента соприкосновения с символом на глубину до «средней линий или заданного числа шагов. Сигналы поступают в схему определения последовательности их поступления и хранятся в памяти. Завершается сканирование лииеек 1, 2, 3 слева направо, которое ведется до линии А-А. Сигналы, характеризуюш;ие верхнюю левую часть символа, иостуиают в свою схему определения последовательности поступления и хранятся is памяти.
По такому алгоритму работы идет выделение информации о средней и нижней частях символа с той лишь разницей, что началом сканирования нижней части служит признак исчезновения оптического сигнала с 10-й линейки матрицы (см. фиг. 2).
На фиг. 3 показаны для ряда символов, иапример цифр, возможные варианты глубины сканирования. Линни о-а соответствуют «среднему значению ширины частей символа, линии б-б, в-в, г-г - глубине сканирования (например, справа налево) на заданное число «шаго,в от момента соприкосновения символа в подпространствах I-III матрицы.
Тогда, например, при условии выделения до момента прекраш,епия сканирования в иодпростраиствах только первых оптических сигпалов, полученных от контура символа, все возможные кодовые комбинации при отсчете времени слева направо для первых частей символа будут иметь вид, иредставленный на фиг. 4, и достаточны для класса символов, несущих существенные информационные признаки но периферии.
Сборки возможных кодовых комбинаций каждого подпространства собираются в схему совпадения и служат электрическим эталоном данного символа.
Предмет и з о б р е т е и н я
Способ онознавания символов, использующий разбиение зоны символа по высоте на несколько групп и осиоваииый па выделении последовательности признаков «надвигания символа иа рецеиторпую матрицу, отличающийся тем, что, с целью увеличения быстродействия и надежности опознавания, символ сканируют по группам горизонтальны.х линеек, например трем, с двух сторон символа на заданную глубину, а перемещение символа осуществляют под углом к направлению ска П1рованпя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптоэлектронное измерительное устройство | 1987 |
|
SU1523918A1 |
| Каретка плосковязальной машины | 1985 |
|
SU1320287A1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО "ПОЛИГРАФ ГОЛЕВА" И ЧЕРТЕЖНЫЙ ПРИБОР ГОЛЕВА | 1998 |
|
RU2127669C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ | 2012 |
|
RU2514155C1 |
| МАСШТАБНАЯ ЛИНЕЙКА | 1925 |
|
SU3490A1 |
| Счетная машина | 1934 |
|
SU41743A1 |
| Способ считывания символов | 1977 |
|
SU714430A1 |
| Координатная линейка | 1930 |
|
SU22281A1 |
| Постоянное запоминающее устройство трансформаторного типа | 1973 |
|
SU449377A1 |
| Прибор для механической разбивки многоугольника, заснятого с натуры, на участки различных заданных площадей | 1928 |
|
SU15333A1 |
фаг 7
й
ВЁ к
Г.Г1
гтт
4jz. 4
l
б/г. .У
