Известны механизмы навескн платформы жаткИ зерноубо:рочлы.х комбайнов, включающие П-образную раму, выполненную с платформой и соединенную с корпусом наклонного транспортера комбайна с помощью щарового шарпнра н тяг механизма уравновешивания. Крепленне рамы с помощью шарового шарнира позволяет жатке коппровать рельеф ноля как в продольном, так и в поперечном направлении. Однако монтаж и демонтаж жатки при использовании этих механизмов затруднен, поскольку требуется рассоединение как щарового шарнира, так н отсоединения тяг мехаиизма уравновешивания.
Известны также механнзмы навески жаток, у которых соединение платформы с корпусом наклонного транспортера осуществляется с помощью быстроразъемных, в частности, крюковых захватов. Однако этн механизмы не нозволяют жатке копировать рельеф поля в обоих направлениях.
Целью изобретения является облегчение монтажа и демонтажа платфор.мы жатки, навешиваемой на корпус наклонного траиспортера с помощью П-образной рамы, соединяемой с корпусом наклонного транспортера шаровым шарниром.
разъемным в внде крюковых, открытых сверху захватов, расположеппых в свою очередь, на раме и снабженных штыревыми замками, фиксирующими платформу па этой раме.
С целью облегчения фпкспровапия платформы па П-образпой раме иа илатформе предусматрпваются виитовые тяги, соединяемые с П-образпой рамой.
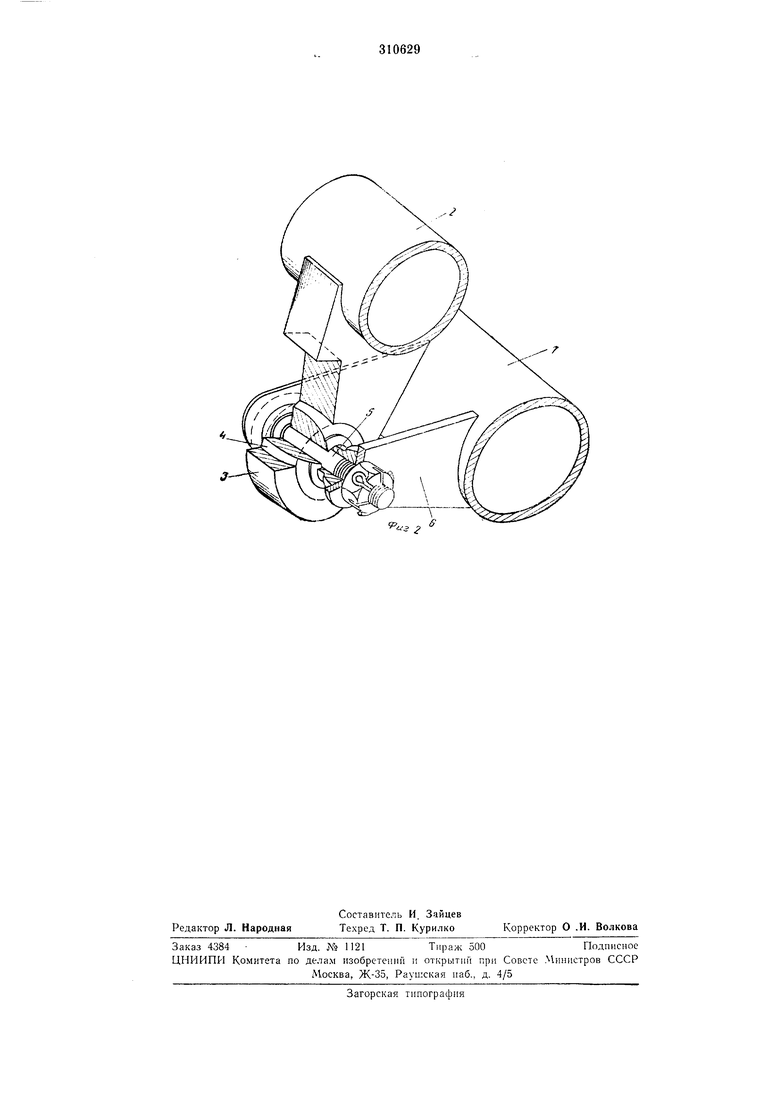
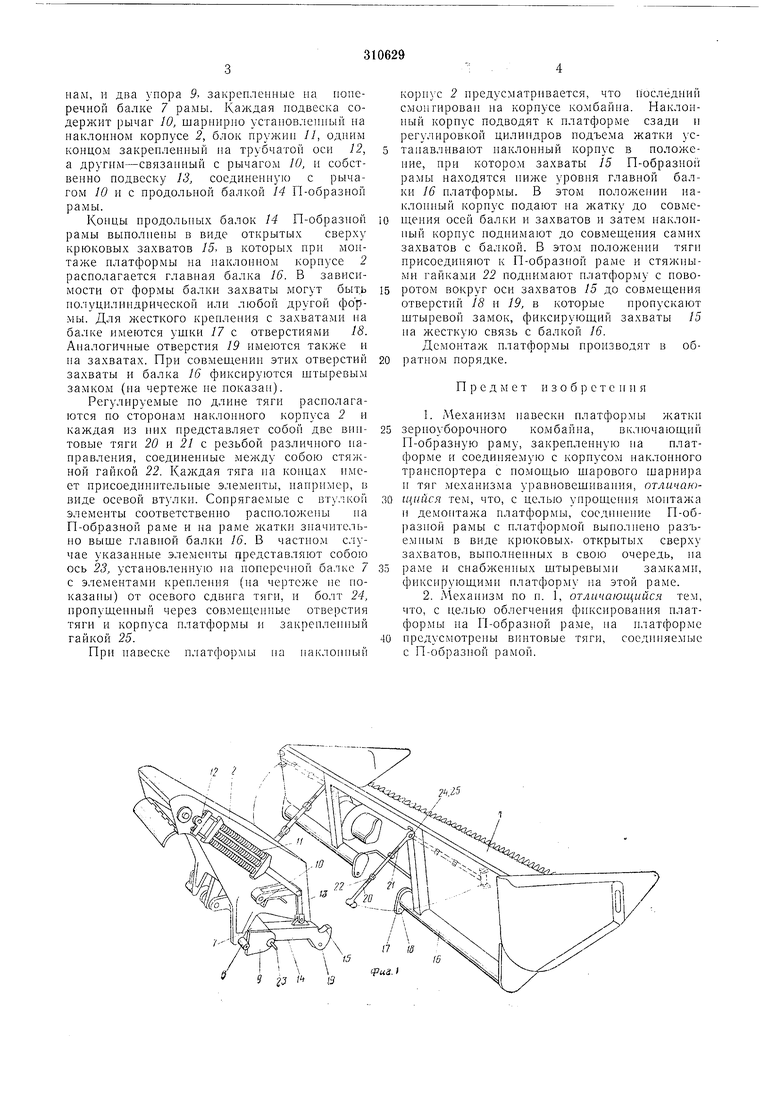
На фиг. 1 показан предлагаемый механизм в аксонометрии; на фиг. 2 - ша-ровой
0 шарнир механизма.
Предлагаемый механизм навески платформы / жатки на наклонном корпусе 2 включает центральную сферпческую опору с ограиичителями поворота платформы в горпзон5та;1ьной нлоскоети, две расноложенные но сторонам сферической опоры подвескн уравновешнвающего механизма, П-образпую раму и две регулируемые по длине тягн.
Центральная сфернческая онора нредетавляет собой шаровой щарнир, внешняя обойма 3 которого приварена к балке наклонного корпуса 2. Сферичес1 ое кольцо 4 этого щарнира установлено па оси 5, в свою очередь смонтированной на кроищтейнах б, нриваренных к поперечной балке 7 П-образ1 ой рамы. Ограничители поворота п.чатформы в горизонтальной плоскости представляют собою два ролика 8, устаповлеппые на наклониом корпусе 2 по его боковым сторонам, и два упора 9, закрепленные на поперечной балке 7 рамы. Каждая подвеска содержит рычаг 10, шарнирпо установлеппый на наклонном корпусе 2, блок пружин 11, одним концом закрепленный на трубчатой оси 12, а другим-связанный с рычагом 10, и собственно подвеску 13, соединенную с рычагом 10 и с продольной балкой 14 П-образной рамы.
Концы продольных балок 14 П-образной рамы выполнены в виде открытых сверху крюковых захватов 15, в которых прп моптаже платформы па наклонном корнусе 2 располагается главная балка 16. В зависимости от формы балки захваты могут быть полуцилнндрической нли любой другой формы. Для жесткого кренления с захватами на балке имеются ушки 77 с отверстиями 18. Аналогичные отверстия 19 имеются также и па захватах. При совмещении этих отверстий захваты и балка 16 фиксируются штыревым замком (па чертеже не показан)Регулируемые по длине тяги раснолагаются по сторонам наклонного корпуса 2 и каждая из ппх представляет собой две виитовые тяги 20 и 21 с резьбой различпого паправлепия, соединенные между собою стяжной гайкой 22. Каждая тяга на концах имеет присоедипнтельные элементы, например, в виде осевой втулки. Сопрягаемые с втулкой элементы соответственно расположены па П-образной раме и на раме жатки значительно выше главной балки 16. В частном случае указаппые элементы представляют собою ось 23, установленную на поперечной балке 7 с элемептамн крепления (па чертеже не показаны) от осевого сдвига тяги, п болт 24, пронушеппый через совмещеппые отверстия тяги и корпуса платформы и закреплепиый гайкой 25.
При навеске платформы на наклонный
корпус 2 предусматривается, что Последний смонтирован на корпусе комбайпа. Наклонный корпус подводят к платформе сзади и регулировкой цилиндров подъема жатки устанавливают паклоиный корпус в положепие, при котором захваты 15 П-образиой рамы находятся ииже уровпя главной балки 16 илатформы. В этом иоложении иаклопный корпус подают на до совмещения осей балки и захватов п затем иаклонпый корпус поднимают до совмещения самих захватов с балкой. В этом ноложении тяги присоединяют к П-образной раме и стяжиыми гайками 22 подпимают платформу с поворотом вокруг оси захватов 15 до совмещеиия отверстий 18 и 19, в которые пропускают штыревой замок, фиксирующий захваты 15 па жесткую связь с балкой 16.
Демоптаж платформы производят в обратном порядке.
Предмет и з о б р е т е и п я
1.Механизм навески платформы жатки зериоуборочного комбайпа, включающий П-образную раму, закрепленную па платформе и соедиияемую с корпусом наклонного транспортера с помощью шарового шарнира п тяг механизма уравновешивания, отличающийся тем, что, с целью упрощения монталса п демонтажа платформы, соединение П-образпой рамы с платформой выполпено разъемным в виде крюковых, открытых сверху захватов, выполненных в свою очередь, на раме н снабженных штыревымн замками, фнкснрующими платформу на этой раме.
2.Механизм по и. 1, отличающийся тем, что, с целью облегчения фнксирования илатформы па П-образпой раме, на платформе предусмотрепы винтовые тяги, соединяемые е П-образной рамой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм навески копирующей жатки зерноуборочного комбайна | 1975 |
|
SU546319A1 |
| Зерноуборочный комбайн | 1981 |
|
SU1007585A1 |
| МЕХАНИЗМ НАВЕСКИ ФРОНТАЛЬНОЙ ШНЕКОВОЙ ЖАТКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1972 |
|
SU354797A1 |
| Жатка зерноуборочного комбайна | 1973 |
|
SU497980A1 |
| Механизм навески платформы жатки зерноуборочного комбайна | 1976 |
|
SU613737A1 |
| НАВЕСНОЕ УСТРОЙСТВО ЖАТВЕННОЙ ЧАСТИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1992 |
|
RU2032308C1 |
| Механизм навески фронтальной жатки косогорного комбайна | 1965 |
|
SU240363A1 |
| Валковая жатка | 1979 |
|
SU835338A1 |
| МЕХАНИЗМ НАВЕСКИ ЖАТКИ КОСОГОРНОГО КОМБАЙНА | 1972 |
|
SU332804A1 |
| Жатка зерноуборочного комбайна | 1976 |
|
SU617029A1 |