Изобретение касается механизмов .навески жатки косогорных зерноуборочных комбайнов.
Известны зерноуборочные комбайны, у которых жатку обычно закрепляют на карпусе наклонного транспортера. В косогорных комбайнах оси ходовых колес выполняются подвижпы|ми в вертикальной плоскости и жатку помимо крепления на корпусе транспортера соединяют с осью колес. На корпусе наклонного транспортера ее закрепляют ша.рнирно. Это позволяет при движении комбайна устанавливать ее параллельно склону. Избестны также механизмы на вески жатки, у которых элементы связи последней с осью колес позволяют ей частично .приспосабливаться к неровностям поч1вы независимо от положения ходовых колес. В частности, связь осупдествляют с помощью тросов, соединенных ,с жаткой пруж-ннами. Хотя пружины позволяют ей копировать микрорельеф поля, но ограничивают ее подвижность, что вызывает неудовлетворительное копирование, возможную поломку жатки вследствие столкновения с неровностями и п.отери урожая.
В предлагаемом механизме, с целью исключения влияния элементов связи на подвижность жатки при копировании ею в рабоче.м положении неровностей почвы, один из элементов связи жатки с осью колес имеет паз /переменного профиля. В пазу располол ен ролик, закрепленный на другом элементе связи. При изменении положения жатки ролик смещается и в ее рабочем положении устанавливается в более щи,рокой части лаза с зазором, вследствие чего связь жатки с осью колес размыкается, a-i жатка имеет возможность свободно приспосабливаться к микрорельефу поля. При переводе же жатки в транспортное положение ролик устанавливается в более узкой части паза без зазора, и жатка при этом постоянно поддерживается параллельно склону.
Паз выполнен на элементе, щарнирно закрепленном на оси колес комбайна и представляющем собой кронштейн, соединенный тягой с аналогичным кронштейном связи второй стороны жатки с осью колес комбайна. Элемент, несущий ролик, имеет вид балки, жестко закрепленной на раме жатки.
На фиг. 1 показана жатка, навещенная на комбайн с помощью предлагаемого механизма, в рабочем положении; на фиг. 2-то же, в транспортном положении.
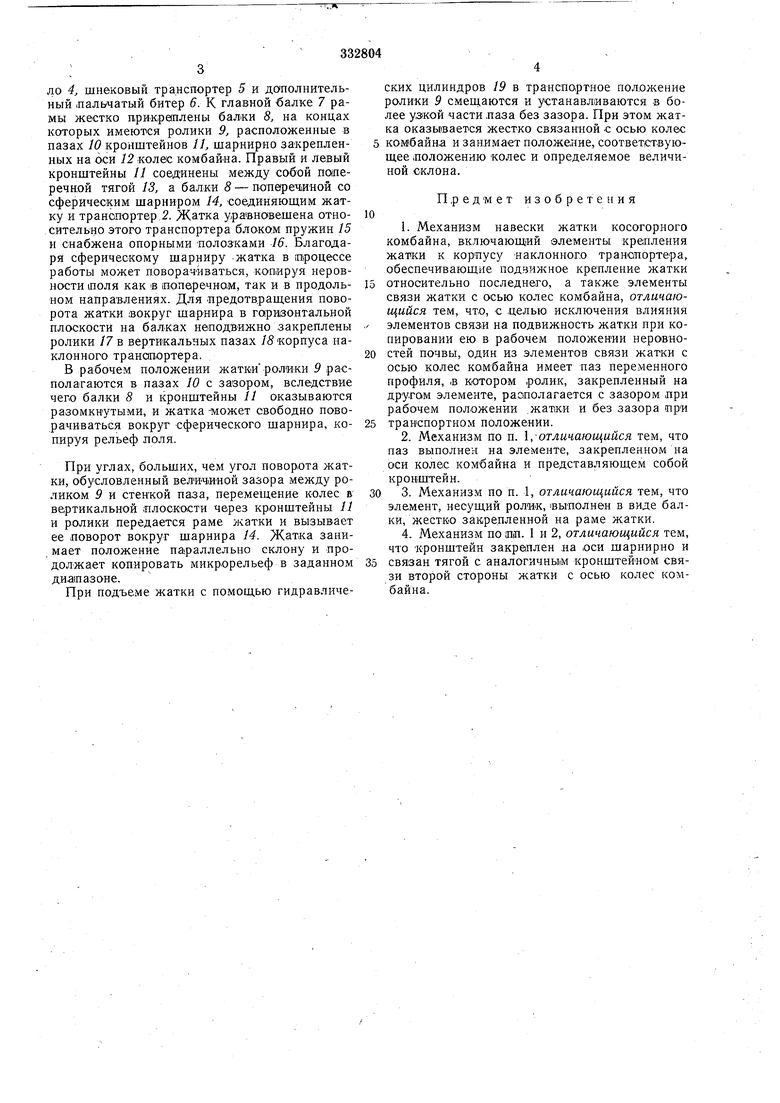
Корпус / комбайна расположен на осях ходовых колес и в процессе работы на склонах с помощью системь выравнивания сохраняет вертикальное положение независимо от величины склона. В передней части к молотилки щарнирно прикреплен наклонный транспортер 2, с которым соединена жатка. На ее раме установлен режущий атапарат 3, мотовило 4, шнековый транспортер 5 и дополнительный .пальчатый битер 6. К главной балке 7 рамы жестко прикреплены балки 8, на концах которых имеются ролики 9, расположенные в пазах 10 кронштейнов //, шарнирно закрепленных на оси 12 колес комбайна. Правый и левый кронштейны // соединены между собой паперечной тягой 13, а балки 8 - попвреч1иной со сферическим шарниром 14, соединяющим жатку и транспортер 2. Жатка уравновешена относительно этого транспортера блоком пружин 15 н снабжена опорными полозками 16. Благодаря сферическому шарниру жатка в гароцессе работы может поворачиваться, копируя неровности яоля как в оо,пвречно.м, так и в продольном направлениях. Для .предотвращения поворота жатки ,вокруг шарнира в гарИ Зонтальной плоскости на балках неподв-ижно закреплены ролики 17 в вертикальных пазах 18 корпуса наклонного транспортера.
В рабочем положении жаткиролики 9 располагаются в пазах 10 с зазором, вследствие чего балки 8 и кронштейны 11 оказываются разомкнутыми, и жатка ожет свободно поворачиваться вокруг сферического шарнира, копируя рельеф л ОЛЯ.
При углах, больших, чем угол поворота жатки, обусловленный величиной зазора между роликом 9 и стенкой паза, перемещение колес в вертикальной .плоскости через кр.онштейны 11 и ролики передается раме жатки и вызывает ее поворот вокруг шарнира 14. Жатка занимает положение па раллельно склону и продолжает копировать микрорельеф в заданном диатазоне.
При подъеме жатки с помощью гидравлических цилиндров 19 в транспортное положение ролики 9 смещаются и устанавливаются в более у. части .паза без зазора. При этом жатка оказывается жестко связанной с осью колес 5 комбайаа и занимает положение, соответствующее положению колес и определяемое величиной склона.
Предмет изобретения
1.Механизм навески жатки косогорного комбайна, включающий элементы крепления жатки к корпусу -наклонного транспортера, обеспечивающие подвижное крепление жатки
относительно последнего, а также элементы связи жатки с осью колес комбайна, отличающийся тем, что, с делью исключения влияния элементов связи на подвижность жатки при копировании ею в рабочем положении неровностей почвы, один из элементов связи жатки с осью колес комбайна имеет паз переменного профиля, ,в котором ролик, закрепленный на другом элементе, рааполагается с зазором при рабочем положении .жатки и без зазора при
транспортном положении.
2.Механизм по п. ,-отличающийся тем, что паз выполнен на элементе, закрепленном на оси колес комбайна и представляющем собой кронштейн.
3. Механизм по п. 1, отличающийся тем, что элемент, несущий ролик, выполнен в виде балки, жестко закрепленной на раме жатки.
4. Механизм по ид. 1 и 2, отличающийся тем, что кронштейн закреплен .на .оси шарнирно и
связан тягой с аналогичным кронштейном связи второй стороны жатки с осью колес комбайна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм навески фронтальной жатки косогорного комбайна | 1965 |
|
SU240363A1 |
| Механизм навески жатки косогорного комбайна | 1973 |
|
SU487606A1 |
| Механизм навески платформы жатки зерноуборочного комбайна | 1976 |
|
SU613737A1 |
| ЖАТКА К КОСОГОРНОМУ КОМБАЙНУ | 1972 |
|
SU430819A1 |
| ЖАТКА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1997 |
|
RU2118879C1 |
| Фронтальная шнековая жатка прицепного зернового комбайна | 1957 |
|
SU114464A1 |
| ЖАТКА НАВЕСНАЯ ФРОНТАЛЬНАЯ | 2002 |
|
RU2208927C1 |
| МЕХАНИЗМ НАВЕСКИ ЖАТКИ НА САМОХОДНУЮ МОЛОТИЛКУ | 1991 |
|
RU2021670C1 |
| ЖАТКА-КОЛОСОУБОРКА | 2011 |
|
RU2467552C1 |
| Сельскохозяйственная жатка | 1983 |
|
SU1149893A1 |


