Из1вестны электромагнитные приводы для гидравличеоких и пневматических распределительных устройств, начальные усилия перемещения которых превышают рабочие, содержащие электромагнит с втяжным якорем. Однако та1кие приводы требуют большой .мощности электромагнита, потребляют миого энергии, «меют большой вес и малый срок службы и недостаточно надежиы.
Предлагаемый привод снабжен упругим элементом, установленным между втяжным якорем п подвижным элементом распределительного устройства. Характеристика упругого элемента тако-ва, что сила его сопротивления в начале хода якоря :меньше начального и больше рабочего усилия перемещения подвижного элемента распределительного устройства, а в процессе хода становится равной начальному усилию перемещения приводного устройства.
Такое выполнение привода позволяет уменьшить требуемую мощность электромагнита, вес и потребляемую энергию, увеличить срок службы и повысить надежность.
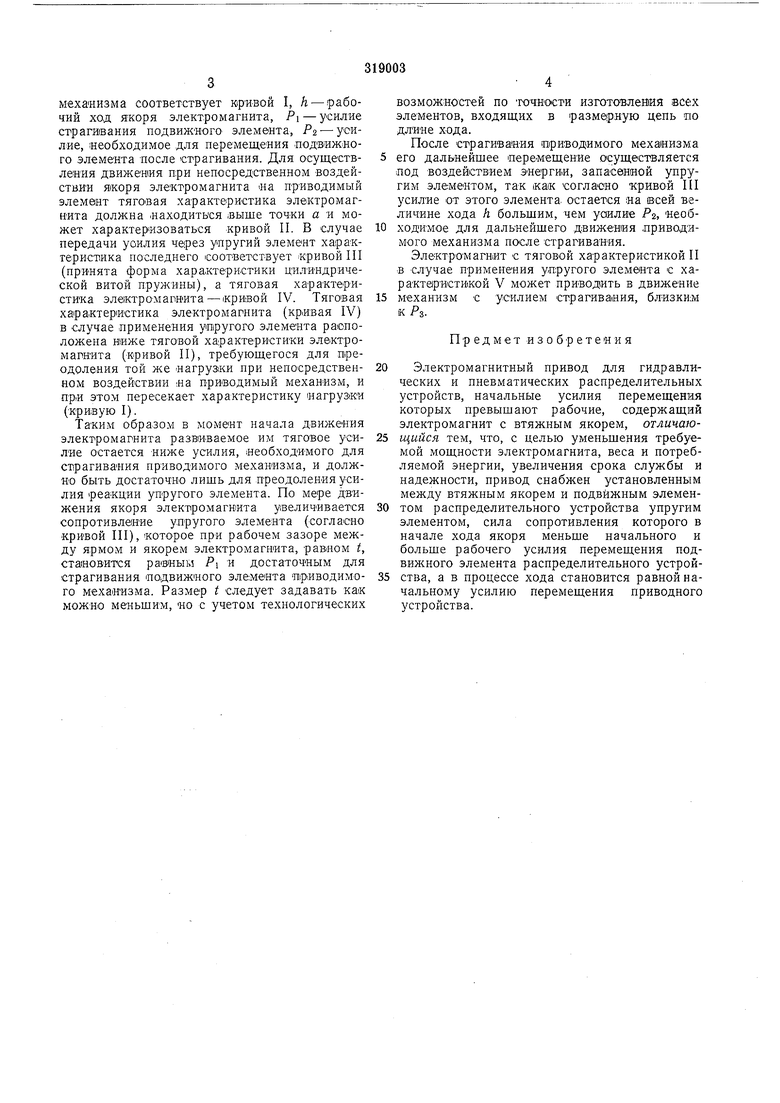
На фиг. 1 схематически показан предлагаемый привод; на фиг. 2 - графики, поясняющие принцип работы привода.
элемент 4 передается подвижному элементу 5 приводимого механизма.
При подаче напряжения на ,катущку электромагнита (на чертеже не Показана)
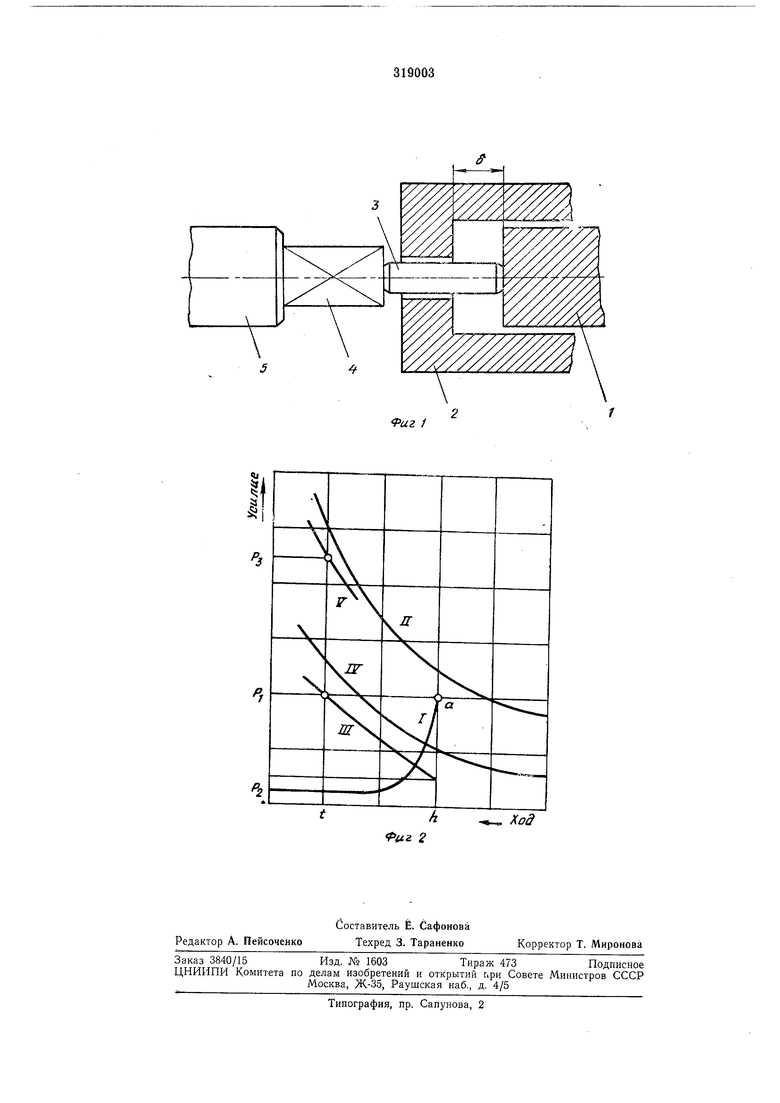
электромагнита начинает перемещаться в сторону уменьшения зазора б между якорем и ярмом. Усилие от якоря передается через толкатель 5 и упругий элемент 4 на подвижный элемент 5. В начале движевия якоря нрибольшой исходной величине зазора б электромагнит развивает небольшое тяговое усилие, достаточное лишь для деформации упругого элемента, при этом подвижный элемент остается пока неподвижным. При уменьшении воздушного зазора б тяговое усилие электромагнита возрастает. Одновременно возрастает и усилие сопротивления упругого элемента (по мере увеличения его деформации), а также сила его воздействия на подвижНый элемент. При достаточно малом зазоре б сила воздействия якоря на упругий элемент и последнего на подвижный элемент становится достаточной для страгивания подвижного элемента - с этого момента начинается его движение под действием энергии, запасенной упругим элементом. Характер взаимодействия сил в предлагаемом приводе иллюстрируется кривыми на фиг. 2.
механизма соответствует кривой I, h - .рабочий ход якоря электромагнита, Р - усилие страгввания подвижного элемента, PZ - усилие, необходимое для перемещения подвижного элемента после страгивания. Для осуществления движения при непосредственном воздействии якоря электромагнита на приводимый элемент тяговая характеристика электромагнита должна находиться /выше точки а и может характеризоваться кривой II. В случае передачи усилия через упругий элемент характеристика последнего 1соответствует кривой III (принята форма характеристики цилиндрической витой пружины), а тяговая характеристика электромагнита-кривой IV. Тяговая характеристика электромагнита (кривая IV) в случае применения упругого элемента расположена Н1иже тяговой характеристики электромагнита (кривой II), требующегося для преодоления той же нагрузки при непосредственном воздействии на приводимый механизм, и при этом пересекает характеристику нагрузки (кривую I).
Таким образом в момент начала движения электромагнита развиваемое им тяговое усилие остается ниже усилия, необходимого для страгивания приводимого механизма, и должно быть достаточно лишь для преодоления усилия реакции упругого элемента. По мере движения якоря электромагнита увеличивается сопротивление упругого элемента (согласно кривой П1), которое при рабочем зазоре между ярмом и якорем электромагнита, равном t, становится рнэнык PI и достаточным для страгивания подвижного элемента приводимого механизма. Размер t следует задавать как можно меньшим, но с учетом технологических
возможностей по точности изготовлемия всех элементов, входящих в размерную цепь по длине хода.
После страгивания приводимого механизма его дальнейшее перемещение осуществляется под воздействием энергии, запасенной упругим элементом, так как согласно кривой III усилие от этого элемента, остается на всей величине хода h большим, чем уаилие PZ, необходимое для дальнейшего движения приводимого механизма после страгивания.
Электромагнит с тяговой характеристикой II в случае применения упругого элемента с характеристикой V может приводить в движение
механизм с усилием страгивания, близкиам кРз.
Предмет изобретения
Электромагнитный привод для гидравлических и пневматических распределительных устройств, начальные усилия перемещения которых превышают рабочие, содержащий электромагнит с втяжным якорем, отличающийся тем, что, с целью уменьщения требуемой мощности электромагнита, веса и потребляемой энергии, увеличения срока службы и надежности, привод снабжен установленным между втяжным якорем и подвижным элементом распределительного устройства упругим элементом, сила сопротивления которого в начале хода якоря меньше начального и больше рабочего усилия перемещения подвижного элемента распределительного устройства, а в процессе хода становится равной начальному усилию перемещения приводного устройства.
fuz f
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВЫЙ ЭЛЕКТРОМАГНИТ | 1973 |
|
SU375690A1 |
| Топливный насос роторного типа для двигателя внутреннего сгорания | 1985 |
|
SU1364246A3 |
| ЭЛЕКТРОМАГНИТ | 2002 |
|
RU2226302C1 |
| Тормозной электродвигатель | 1984 |
|
SU1239789A1 |
| ЭЛЕКТРОМАГНИТ | 1971 |
|
SU301747A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЕЙ | 1994 |
|
RU2074438C1 |
| Поршневой микродетандер | 1990 |
|
SU1760261A1 |
| КЛАПАННЫЙ РАСПРЕДЕЛИТЕЛЬ | 2011 |
|
RU2451857C1 |
| Стенд для испытания электромагнитов | 1976 |
|
SU594486A1 |
| Устройство для определения статических тяговых характеристик двухзазорного электромагнита | 1977 |
|
SU682878A1 |
2
- Xff
