Изобретение относится к гидропневматике и может быть использовано для дистанционного управления подачей рабочей среды к исполнительным механизмам, например, летательных аппаратов.
Известны распределительные клапаны с электромагнитным приводом, используемые в системах управления гидравлических и пневматических приводов для изменения направления движения рабочей среды. /Пржиалковский, А.Л. Щучинский С.Х. Электромагнитные клапаны. Издательство «Машиностроение». Ленинград. 1967, стр.86, рис.44/
Клапаны этого типа обычно имеют один патрубок для подвода среды, один патрубок для подачи рабочей среды в управляемый исполнительный механизм и патрубок (или отверстие) для сброса отработанной рабочей среды. Подача рабочей среды и ее сброс осуществляется изменением положения затвора, управляемого электромагнитным приводом. Такие распределительные клапаны отличаются простотой конструкции. Однако они обладают низкой ударовибростойкостью и требуют постоянного энергопотребления в одном из положений затвора.
Также известен электромагнитный трехпозиционный распределитель (а.с. СССР №916853, М. Кл3. F16K 31/02, опубл. 30.03.82, бюл. №12), содержащий корпус, в котором установлены параллельно друг другу два нагруженных пружинами запорных органа, жестко соединенные с одной стороны с якорями электромагнитов, а с другой - со штоками, и фиксирующее устройство. Фиксирующее устройство выполнено в виде установленных на одной оси вращения и нагруженных пружиной в направлении штоков кулачков.
Преимуществом распределителя является возможность сохранения положения запирающих органов без потребления электроэнергии.
Однако данный распределитель не может быть использован в условиях действия внешних механических факторов из-за низкой ударовибростойкости запорных органов.
Наиболее близким техническим решением к предлагаемому и принятым за прототип является клапанный пневмораспределитель В.И.Яцкова (патент СССР №1766280, МКИ5 F16K 31/02, опубл. 30.09.92, бюл. №36), содержащий корпус с каналами входа, выхода и пневматической связи с исполнительным механизмом, в котором установлены попарно подпружиненные запорные органы впуска и выпуска среды. В корпусе выполнена полость, соединенная с каналом пневматической связи, и в ней установлен подпружиненный и кинематически связанный с запорными органами двуплечий рычаг. В качестве привода предусмотрен электромагнит с постоянным магнитом. При этом управление клапанным распределителем осуществляется короткими импульсами электрического тока, что является его достоинством в условиях дефицита электроэнергии, например, при использовании на летательных аппаратах.
Недостатком прототипа является невысокая надежность работы в условиях внешних механических воздействующих факторов. Вызвано это тем, что неуравновешенные подвижные элементы (запорные органы, якорь и двуплечий рычаг), связанные между собой посредством пружин, образуют многомассовую колебательную систему, чувствительную к действиям линейных, ударных и вибрационных ускорений.
Другим недостатком является несовершенная тяговая характеристика применяемого электромагнитного привода, которая характеризуется малым тяговым усилием в начале хода якоря и чрезмерным его возрастанием (по асимптоте) в конце хода. Поскольку перестановка запорных органов сопряжена с преодолением противодействующих сил пружин при малом начальном тяговом усилии, то быстродействие пневмораспределителя с таким приводом может быть достигнуто только за счет увеличения потребления электрической мощности, которая в летательных аппаратах ограничена, но при этом его работа будет сопровождаться сильными динамическими ударами подвижных элементов о корпус, что приводит к интенсивному износу контактирующих поверхностей.
Таким образом, перечисленные недостатки ухудшают эксплуатационные качества известного распределителя и ограничивают условия его применения.
Задачей, на решение которой направлено предлагаемое изобретение, является обеспечение надежности работы распределителя в условиях действия линейных, ударных и вибрационных ускорений.
Технический результат, полученный при осуществлении изобретения, заключается в повышении ударовибростойкости и обеспечении быстродействия при сохранении энергопотребления.
Достигается это тем, что в клапанном распределителе, содержащем корпус с каналами входа, выхода и связи с исполнительным механизмом, два запорных органа, кинематически связанных между собой посредством двуплечего рычага, две пружины сжатия и привод управления запорными органами, включающий электромагнит с постоянным магнитом, новым является то, что в привод управления дополнительно введен второй электромагнит с постоянным магнитом. При этом обмотки указанных электромагнитов электрически соединены между собой таким образом, что при подаче на них питающего напряжения направление наведенного магнитного поля одного из электромагнитов совпадает с направлением магнитного поля его постоянного магнита, а для другого электромагнита направления указанных полей противоположны. Каждый запорный орган жестко соединен с якорем соответствующего электромагнита и связан с двуплечим рычагом посредством шарнирных соединений, при этом запорные органы уравновешены относительно оси вращения указанного рычага.
Благодаря введению в привод управления второго электромагнита с постоянным магнитом, запорные органы, каждый из которых жестко соединен с якорем соответствующего электромагнита и связан посредством шарнирных соединений с двуплечим рычагом, удерживаются в крайних положениях силой магнитного взаимодействия постоянного магнита одного из электромагнитов и притянутого к нему соответствующего якоря. При этом вследствие резкого возрастания силы магнитного взаимодействия при малом зазоре между якорем и постоянным магнитом обеспечивается жесткая фиксация запорных органов, что повышает ударовибростойкость клапанного распределителя в указанных положениях.
Другим фактором, повышающим ударовибростойкость, является то, что запорные органы, связанные с двуплечим рычагом посредством шарнирных соединений и уравновешенные относительно оси вращения указанного рычага, становятся нечувствительными к действиям линейных, ударных и вибрационных ускорений.
Кроме этого, благодаря указанному выше соединению обмоток электромагнитов, получено высокое быстродействие клапанного распределителя. Объясняется это тем, что в момент, когда в тяговом электромагните наведенное обмоткой поле, совпадающее с направлением поля его постоянного магнита, при взаимодействии с соответствующим якорем создает усилие, перемещающее запорные органы в другое крайнее положение, в другом электромагните наведенное обмоткой поле, ориентированное против поля своего постоянного магнита, прекращает действие магнитной силы, удерживающей запорные органы в первоначальном положении. Указанное обстоятельство, т.е. отсутствие в момент перестановки запорных органов сил, препятствующих их перемещению, способствует повышению быстродействия клапанного распределителя. Причем высокое быстродействие получено за счет распределения электрической мощности между обмотками электромагнита без увеличения потребления электроэнергии.
Также получен дополнительный технический результат, заключающийся в уменьшении силы динамического удара при перестановке запорных органов из одного крайнего положения в другое.
Для этого каждая пружина сжатия установлена с возможностью воздействия на соответствующий запорный орган, при этом величина рабочего хода пружины не превышает половины заданной величины хода запорного органа, и дополнительно введены два конечных выключателя с возможностью их переключения двуплечим рычагом.
Указанные пружины из-за ограниченности рабочего хода могут воздействовать на соответствующие запорные органы на участках, не превышающих половины их хода, причем одна из них воздействует на первый запорный орган на первой половине его хода, а другая - на второй запорный орган на второй половине его хода. При этом пружина, воздействующая на запорный орган на второй половине его хода, рассеивает при своем сжатии часть кинетической энергии, накопленной подвижными элементами, в результате чего снижается сила динамического удара.
Уменьшению силы динамического удара также способствует введение двух конечных выключателей, переключающихся двуплечим рычагом, которые заблаговременным разрыванием цепи питания электромагнитов предотвращают чрезмерное возрастание тягового усилия в конце хода запорных органов.
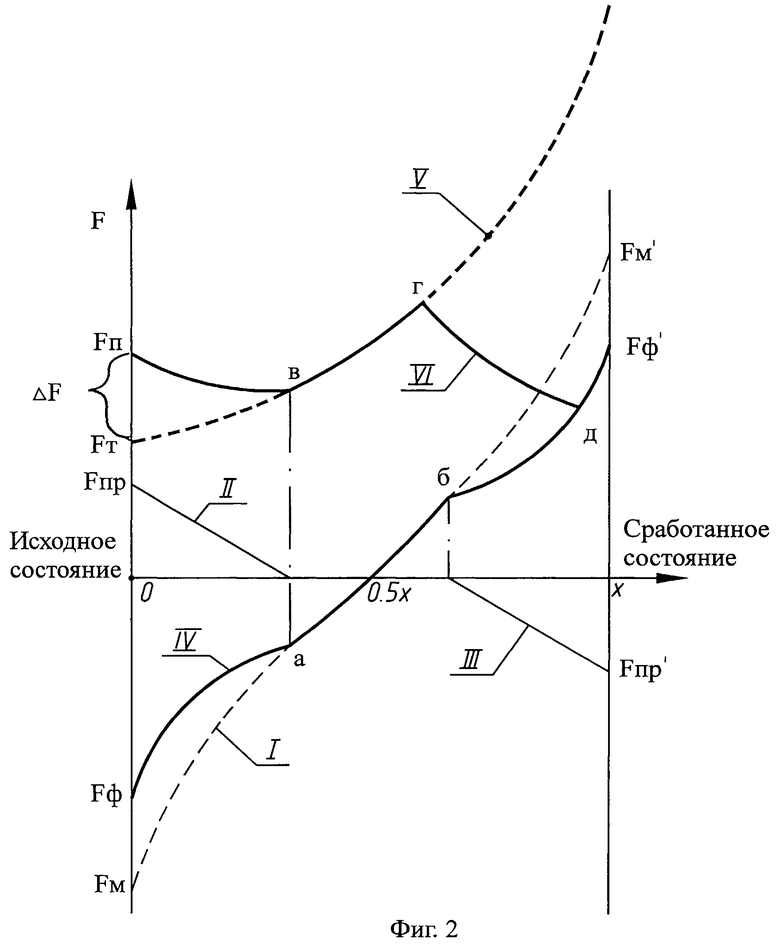
На фиг.1 изображена конструкция предлагаемого клапанного распределителя в исходном состоянии.
На фиг.2 показаны кривые изменения сил, действующих на запорные органы распределителя в зависимости от их положения (хода).
Здесь: I - кривая изменения сил взаимодействия якорей с постоянными магнитами;
II и III - силовые характеристики пружин;
IV - кривая изменения фиксирующей силы;
V - статическая тяговая характеристика электромагнитного привода;
VI - кривая изменения перестановочной силы.
Клапанный распределитель содержит корпус 1 с каналами 2, 3 и 4, соответствующими входу, выходу рабочей среды и пневматической связи с исполнительным механизмом, на котором установлены выполняющие функцию электромагнитного привода два идентичных электромагнита 5, 6 с постоянными магнитами 7, 8, соответственно. Обмотки 9, 10 электромагнитов 5, 6 соединены между собой таким образом, что при одновременной подаче на них постоянного напряжения наведенное поле одного из них совпадает с полем принадлежащего ему постоянного магнита, а для другого - наведенное поле направлено против его постоянного магнита. Для этого, например, если обмотки 9, 10 электромагнитов 5, 6 намотаны в одну сторону, а постоянные магниты 7, 8 обращены одноименными полюсами к соответствующим якорям 11, 12, то при последовательном соединении обмоток 9, 10 начало одной из них связано с началом другой или конец одной - с концом другой, а при параллельном соединении обмоток - начало и конец одной из них связаны соответственно с концом и началом другой.
В полостях каналов 2 и 3 соосно электромагнитам 5, 6 размещены два запорных органа 13, 14, которые при прилегании к седлам 15, 16 обеспечивают герметичное перекрывание каналов. Запорные органы 13, 14 с одной стороны электромагнитов 5, 6 жестко связаны с якорями 11, 12, соответственно, а с другой - связаны с двуплечим рычагом 21 посредством шарнирных соединений, включающих толкатели 17, 18 с шаровыми наконечниками и шарниры 19, 20. При этом запорные органы 13, 14 с соединенными с ними якорями 11, 12 и толкателями 17, 18 взаимно уравновешены относительно оси вращения двуплечего рычага 21.
В корпусе 1 установлены пружины сжатия 22, 23 с возможностью воздействия на соосные запорные органы 13, 14 через подвижные втулки 24, 25. Рабочий ход каждой пружины не превышает половины хода соосного с ней запорного органа. Для ограничения хода пружин 22, 23 в корпусе 1 установлены опорные кольца 26, 27, соответственно.
Конечные выключатели 28, 29, имеющие возможность кинематического взаимодействия с двуплечим рычагом 21, предназначены для разрывания электрических цепей питания обмоток 9, 10 электромагнитов 5, 6, соответственно.
Клапанный распределитель в зависимости от положений запорных органов может находиться в двух рабочих состояниях: в исходном, при котором канал 4 пневматической связи с исполнительным механизмом соединен с каналом 3 выхода рабочей среды (см. фиг.1), и в сработанном, при котором канал 4 связи с исполнительным механизмом соединен с каналом 2 входа рабочей среды.
Принцип действия клапанного распределителя заключается в следующем.
В исходном состоянии запорный орган 13, занимающий крайнее положение, прижат к седлу 15, а запорный орган 14 поднят от седла 16. Пружина 22 нагружена запорным органом 13 и находится с ним в силовом взаимодействии, а пружина 23 отпущена и силового контакта с запорным органом 14 не имеет. Конечный выключатель 29 нормально замкнут, а конечный выключатель 28 воздействием двуплечего рычага 21 разомкнут. В этом положении запорные органы 13, 14 жестко зафиксированы силой притяжения якоря 12 к постоянному магниту 8, которая при равенстве плеч двуплечего рычага 21 превышает суммарную силу сжатой пружины 22 и силу притяжения якоря 11 к постоянному магниту 7. В сущности, фактическое значение фиксирующей силы есть результат вычитания из первой силы двух последних.
Перевод клапанного распределителя в сработанное состояние, связанный с перестановкой запорных органов 13, 14 в другое крайнее положение, осуществляется одновременной подачей постоянного напряжения на электромагниты 5 и 6 через нормально замкнутый конечный выключатель 29. При этом поле, наведенное обмоткой 10 и направленное против поля постоянного магнита 8, прекращает взаимодействие якоря 12 с указанным магнитом. В то же время в электромагните 5 поле, наведенное обмоткой 9 и совпадающее с направлением поля постоянного магнита 7, многократно увеличивает силу притяжения якоря 11, направленную на перемещение запорных органов 13 и 14 в другое крайнее положение. Причем на участке первой половины хода после начала движения запорных органов 13 и 14 продолжает действовать сила сжатой пружины 22, способствующая их перемещению. Действие пружины 22 прекращается достижением втулки 24 опорного кольца 26.
В конце первой половины хода прекратится воздействие двуплечего рычага 21 на конечный выключатель 28, и он замкнется, подготавливая цепь для подачи питания на возвращение распределителя в исходное состояние.
В начале второй половины хода воздействием двуплечего рычага 21 конечный выключатель 29 разрывает цепь питания, и дальнейшее движение запорных органов 13 и 14 происходит за счет сил остаточной индукции электромагнита 5 и постоянного магнита 7. На этом же участке запорный орган 14 вступает через подвижную втулку 25 в силовой контакт с пружиной 23, при деформировании (сжатии) которой рассеивается часть кинетической энергии, накопленной подвижными элементами. При этом силовой контакт запорного органа 14 с пружиной 23 сохранится до получения команды на возвращение распределителя в исходное состояние.
Таким образом, в результате уменьшения перестановочного усилия путем заблаговременного отключения питания электромагнитов 5 и 6 и демпфирующего действия пружины 23 обеспечивается мягкая посадка запорного органа 14 на седло 16. В сработанном состоянии запорные органы фиксируются силой притяжения якоря 11 к постоянному магниту 7, превышающей совместное действие сил сжатия пружины 23 и притяжения якоря 12 к постоянному магниту 8.
Возвращение клапанного распределителя в исходное состояние осуществляется подачей на электромагниты 5, 6 через замкнутый конечный выключатель 28 питания обратной полярности в соответствии с описанным выше алгоритмом, но в обратном порядке. При этом поле, наведенное обмоткой 9 электромагнита 5, прекращает действие фиксирующей силы, а поле, наведенное обмоткой 10 электромагнита 6, и пружина 23 будут создавать силу, перемещающую запорные органы 13 и 14 в исходное положение. Пружина 22 будет выполнять функцию демпфера. Цепь питания будет отключаться воздействием двуплечего рычага 21 на конечный выключатель 28, а конечный выключатель 29 восстановит нормально замкнутое состояние, подготавливая электрическую цепь для последующего срабатывания.
В процессе перестановки запорных органов 13, 14 из одного крайнего положения в другое проявляются действия сил постоянных магнитов, деформации пружин и электромагнитных сил.
Характер действия этих сил иллюстрируется фиг.2. Здесь по оси ординат отложены действующие силы F, а по оси абсцисс - перемещение запорных органов х. Кривая I показывает характер изменения сил взаимодействия якорей 11, 12 с постоянными магнитами 7, 8 (при отсутствии питания электромагнитов). В исходном состоянии запорные органы удерживаются силой Fм притяжения якоря 12 к постоянному магниту 8. На середине хода (0,5х) магнитные силы, действующие со стороны постоянных магнитов 7 и 8, уравновешиваются, и запорные органы 13, 14 оказываются в состоянии неустойчивого равновесия. По мере дальнейшего перемещения запорных органов сила притяжения якоря 11 к постоянному магниту 7 будет возрастать, достигая максимума  в сработанном состоянии. При этом силы Fм и
в сработанном состоянии. При этом силы Fм и  равны по модулю.
равны по модулю.
В крайних положениях на запорные органы, кроме сил постоянных магнитов, действует сила деформированной пружины 22 или 23. Прямые II и III представляют механические характеристики пружин 22, 23, соответственно. С учетом действия сил деформированных пружин, направленных против сил притяжения якорей к соответствующим постоянным магнитам в крайних положениях запорных органов, фиксирующие силы будут соответствовать Fф и  . Ломаная кривая IV, полученная графическим сложением кривой I и прямых II и III, является статической характеристикой изменения фиксирующих сил по мере перемещения запорных органов из одного крайнего положения в другое. Здесь точки «а» и «б» соответствуют прекращению действия пружины 22 и началу действия пружины 23.
. Ломаная кривая IV, полученная графическим сложением кривой I и прямых II и III, является статической характеристикой изменения фиксирующих сил по мере перемещения запорных органов из одного крайнего положения в другое. Здесь точки «а» и «б» соответствуют прекращению действия пружины 22 и началу действия пружины 23.
Кривая V представляет собой статическую тяговую характеристику электромагнитного привода при одновременной подаче питающего напряжения на электромагниты 5, 6. Здесь Fт - начальное тяговое усилие, создаваемое электромагнитным приводом. С учетом силы деформированной пружины 22, действующей в направлении перемещения запорных органов, фактическая начальная перестановочная сила будет соответствовать Fп. Здесь приращение ΔF получено за счет действия пружины сжатия 22.
Кривая VI показывает характер изменения перестановочной силы, действующей на запорные органы при их перемещении из одного крайнего положения в другое. В точке «в» заканчивается действие пружины 22, и движение запорных органов осуществляется под действием тягового усилия привода. В точке «г» питающее напряжение отключается, и дальнейшее движение запорных органов происходит под действием остаточной индукции наведенного поля и постоянного магнита 7. При этом исключается чрезмерное возрастание тягового усилия (показано пунктирной линией) в конце хода запорных органов 13 и 14 при малом зазоре между якорем 11 и электромагнитом 5. На этом же участке запорный орган 14 начинает контактировать с пружиной 23, выполняющей функцию демпфера, через подвижную втулку 25. Уменьшению перестановочного усилия, благодаря которому снижается сила динамического удара, соответствует участок г-д -  кривой VI.
кривой VI.
В сработанном состоянии запорные органы фиксируются силой  притяжения якоря 11 к постоянному магниту 7.
притяжения якоря 11 к постоянному магниту 7.
Изготовлены опытные образцы предлагаемого клапанного распределителя и проведены испытания, которые подтвердили достижения заявленных технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2007 |
|
RU2338110C1 |
| Устройство для создания выдержки времени | 1976 |
|
SU658617A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН (ВАРИАНТЫ) | 2007 |
|
RU2343328C2 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2005 |
|
RU2282090C1 |
| Электромагнитный клапан | 1972 |
|
SU445799A1 |
| ЭЛЕКТРОМАГНИТ | 1998 |
|
RU2138091C1 |
| Электромагнтный клапан | 1976 |
|
SU580398A2 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2003 |
|
RU2243441C1 |
| Клапанный пневмораспределитель В.И.Яцкова | 1990 |
|
SU1766280A3 |
Изобретение относится к гидропневматике и может быть использовано для дистанционного управления подачей рабочей среды к исполнительным механизмам, например, летательных аппаратов. Клапанный распределитель содержит корпус с каналами входа, выхода и связи с исполнительным механизмом, два запорных органа, кинематически связанных между собой через двуплечий рычаг, две пружины сжатия и привод управления запорными органами. Привод управления включает два электромагнита с постоянными магнитами. Обмотки указанных электромагнитов электрически соединены между собой таким образом, что при подаче на них питающего напряжения направление наведенного магнитного поля одного из электромагнитов совпадает с направлением магнитного поля его постоянного магнита. Для другого электромагнита направления указанных полей противоположны. Каждый запорный орган жестко соединен с якорем соответствующего электромагнита и связан с двуплечим рычагом посредством шарнирных соединений. При этом запорные органы уравновешены относительно оси вращения указанного рычага. Технические результаты: повышение ударовибростойкости и обеспечение быстродействия при сохранении энергопотребления, уменьшение силы динамического удара. 1 з.п. ф-лы, 2 ил.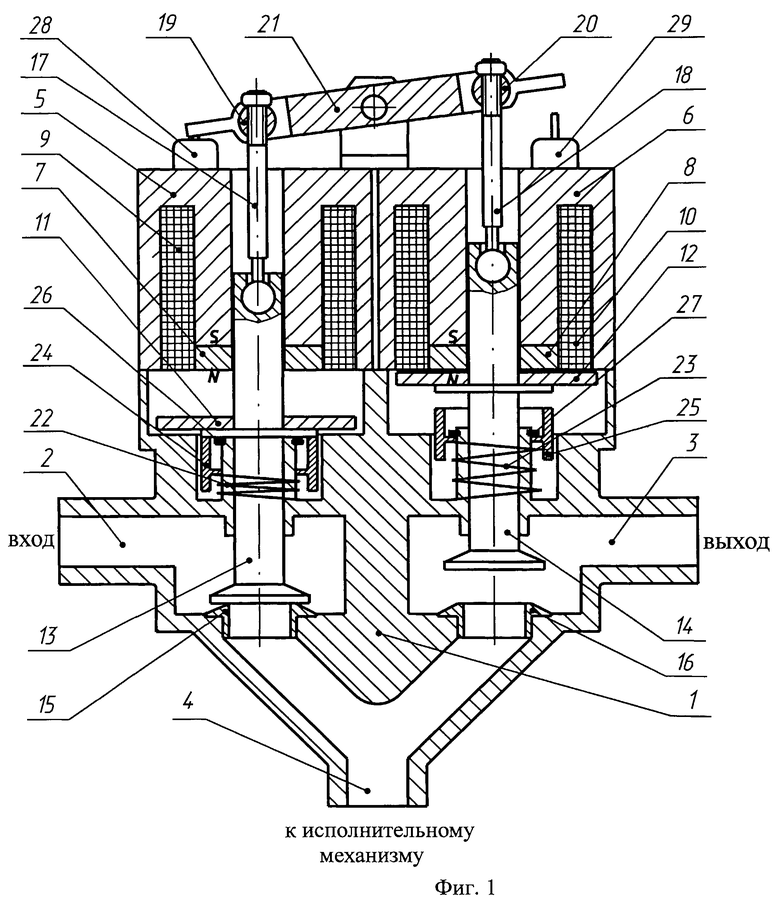
1. Клапанный распределитель, содержащий корпус с каналами входа, выхода и связи с исполнительным механизмом, два запорных органа, кинематически связанных между собой посредством двуплечего рычага, две пружины сжатия и привод управления запорными органами, включающий электромагнит с постоянным магнитом, отличающийся тем, что в привод управления дополнительно введен второй электромагнит с постоянным магнитом, причем обмотки электромагнитов электрически соединены между собой таким образом, что при подаче на них питающего напряжения направление наведенного магнитного поля одного из электромагнитов совпадает с направлением магнитного поля его постоянного магнита, а для другого электромагнита направления указанных полей противоположны, каждый запорный орган жестко соединен с якорем соответствующего электромагнита и связан с двуплечим рычагом посредством шарнирных соединений, при этом запорные органы уравновешены относительно оси вращения указанного рычага.
2. Клапанный распределитель по п.1, отличающийся тем, что каждая пружина сжатия установлена с возможностью воздействия на соответствующий запорный орган, при этом величина рабочего хода пружины не превышает половины заданной величины хода запорного органа, дополнительно введены два конечных выключателя цепи питания электромагнитов с возможностью их переключения двуплечим рычагом.
| Клапанный пневмораспределитель В.И.Яцкова | 1990 |
|
SU1766280A3 |
| Электромагнитный трехпозиционный распределитель | 1979 |
|
SU916853A1 |
| Электромагнитный распределитель | 1982 |
|
SU1079934A2 |
| Электропневматический клапан | 1979 |
|
SU947556A1 |
| Смеситель | 2002 |
|
RU2224940C1 |
| Распределитель с электромагнитным приводом | 1980 |
|
SU855314A1 |
| СРЕДСТВО, СОДЕРЖАЩЕЕ FGF2 В КАЧЕСТВЕ АКТИВНОГО ИНГРЕДИЕНТА, ДЛЯ ЛЕЧЕНИЯ ИЛИ ПРОФИЛАКТИКИ АСТМЫ И ХРОНИЧЕСКИХ ОБСТРУКТИВНЫХ ЗАБОЛЕВАНИЙ ЛЕГКИХ | 2005 |
|
RU2351356C2 |
| Устройство для механического удаления высокопрочного поверхностного слоя с малогабаритных деталей | 1982 |
|
SU1122391A1 |

