Как известно, недостатками синхронной передачи угла при помощи асинхронных двигателей являются 1) нулевой синхронизирующий момент при покое системы; 2) расхождение отдельных двигателей на некоторые углы друг относительно друга; 3) необходимость согласования двигателей после отключения их от сети.
Первый недостаток вызывает колебания двигателя около своего среднего положения при толчках. Второй недостаток понижает степень точности и надежности передачи. Наконец, третий недостаток сказывается на затрате времени на согласование двигателей перед началом работы.
Настоящее изобретение имеет целью устранить первый и третий недостатки полностью, а второй ослабить, путем включения электромагнитного тормоза в линию, соединяющую роторы задающего и принимающего двигателей.
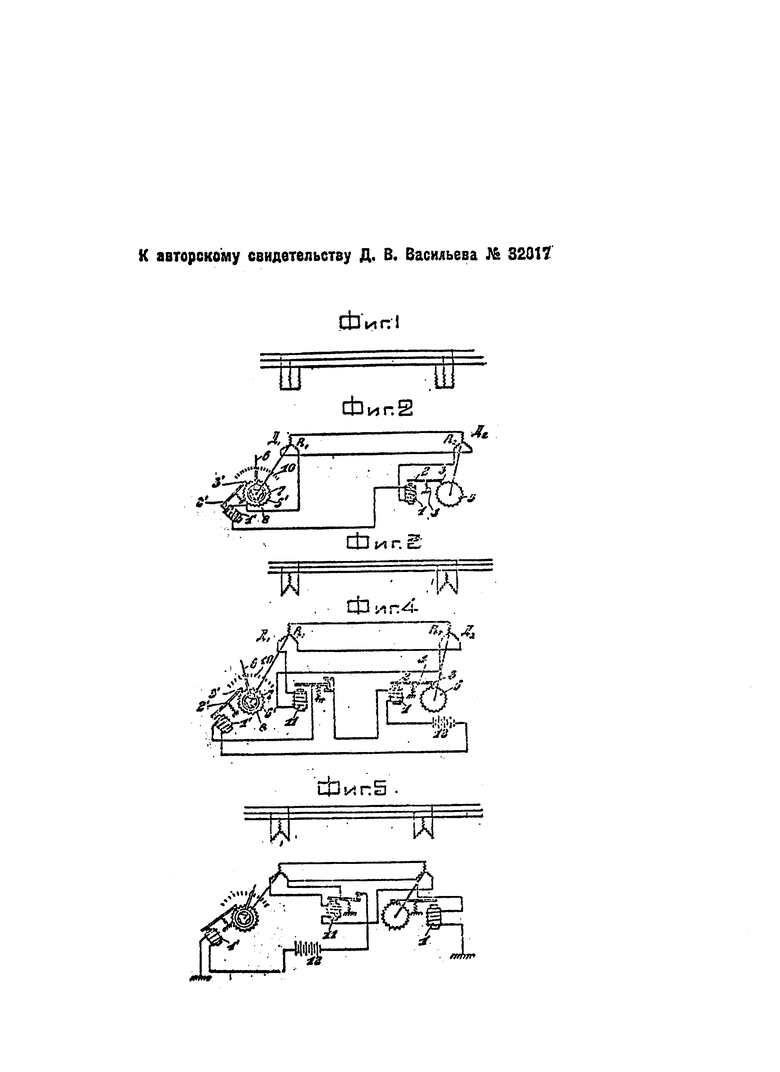
На чертеже фиг. 1 и 2 изображают схему предлагаемого устройства; фиг. 3 4 и 5 - то же, но в несколько видоизмененной форме выполнения.
В один (фиг. 1) или во все провода (фиг. 2) линии, соединяющей ротор задающего двигателя с ротором принимающего двигателя, включается обмотка 1 электромагнитного тормоза, снабженного качающимся якорем 2 с собачкой 3, оттягиваемым пружиной 4. При отсутствии тока в обмотке 1 тормоза собачка 3 входит в углубление между зубцами установочного диска 5, насаженного на вал принимающего двигателя. Стопорное устройство может быть иным; например, установочный диск может быть снабжен резиновой обкладкой, а якорь, вместо собачки, покрыт резиновым выступом. Если повернуть ротор задающего двигателя на некоторый угол, то в цепи роторов возникнет уравнительный ток, переходящий одновременно и через обмотку 1, благодаря чему при определенной силе тока тормоз сработает, подняв собачку 3 (или собачку 31 на фиг. 2). Принимающий двигатель повернется на некоторый угол в сторону поворота задающего двигателя, благодаря чему ток в линии ротора и обмотке 1 уменьшится и якорь 2 опустится под действием пружины 4, закрепив ротор принимающего двигателя в новом положении.
Шаг зубцов должен быть рассчитан на допустимый угол расхождения отдельных принимающих двигателей, работающих от одного задающего. Согласование роторов двигателей перед началом работы в предлагаемом устройстве вовсе устраняется, так как при отключении статоров роторы будут занимать неизменное положение. Устройство тормоза может быть любым.
Для повышения точности работы системы можно у задающего двигателя также установить тормозное приспособление подобного типа, назначение которого - связывать стрелку отсчетного циферблата с валом лишь в момент отпускания тормозом у принимающего двигателя вала последнего.
В качестве примера выполнения подобного приспособления может быть применено следующее устройство (фиг. 3).
У задающего двигателя Д1 установлено тормозное приспособление 1′, подобное тормозному приспособлению 1 у принимающего двигателя Д2 (фиг. 3 и 4). Собачка 3′ рычага 2′ тормоза запирает при отсутствии тока установочный диск 5′, с которым скреплено несущее стрелку кольцо 7. Последнее может вращаться с легким трением на втулке 8, закрепленной на валу двигателя.
При повороте задающего двигателя в цепи роторов системы возникает ток, обтекающий обмотки тормозов 1′ и 1 заставляющий их сработать. При этом рычаги 2 и 2′ одновременно отпускают диски 5′ и 5, благодаря чему стрелка 6, увлекаемая втулкой 8, начинает двигаться по циферблату 10, одновременно с ротором Rz принимающего двигателя.
Очевидно, что конструкция закрепления стрелки на валу и связи ее с рычагом тормоза может быть различной.
Тормозы 1 и 1′ могут также приводиться в действие не непосредственно, а через одно общее или два отдельных реле 11, включенных в цепь роторов системы (фиг. 4).
Реле 11 и батарея 12, питающая обмотки тормозов 1′ и 1, может быть установлена на задающем посту, причем цепи тормозов 1 и 1′ можно использовать один из соединительных проводников системы (фиг. 5).
1. Устройство для синхронной передачи угла поворота при помощи асинхронных двигателей с применением электромагнитного тормоза, отличающееся тем, что обмотка тормоза включена в линию, соединяющую обмотку роторов задающего и каждого принимающего двигателя.
2. Форма выполнения устройства, отличающаяся применением установленного у задающего двигателя тормоза 1′, включенного в линию, соединяющую обмотки роторов системы и предназначенного удерживать в неизменном положении отсчетную стрелку задающего двигателя до момента срабатывания тормозов у принимающих двигателей.
3. Форма выполнения устройства по пп. 1 и 2, отличающаяся применением реле 11, включенного в цепь роторов системы и предназначенного замыкать цепь тормозов 1′ и 1 у принимающего и задающего двигателей.
