Датчик может быть иснользоваи в схемах автоматики и в счетио-решающей технике для преобразования угловых перемещений в электрический сигнал по типу «угол-иапряжеиие, пропорциональное сииусу угла или «угол- фаза.
Известные датчики угловых перемещеинй (электрические машины) аналогичного назначения выполняются на ферромагнитных цилиндрических магнитопроводах с прямоугольными зубцами и распределенной обмоткой.
РТзвестеи многоиолюсный вращающийся трансфо)матор, состоящий из магинтопроводов статора и ротора в виде кольцевых концентрически расположеппых пакетов магпнтопроводов, в котором, с целью повышения точности вос1гроизведения синусоидальной зависимости, коитур каждого зубца, образующий зазор машины, одного из магнптопроводов выполпеи с изменяющимся .
Целью настоящего изобретения является создание устройства, в котором синусоидальная форма выходного иапряжения достигается выполнеиием профильных зубцов одного пз магиитопроводов ротора или статора с одиовременным оптимальньш выбором размеров зубцов ротора и статора по ширине и скосом пакета магнитопровод;а.
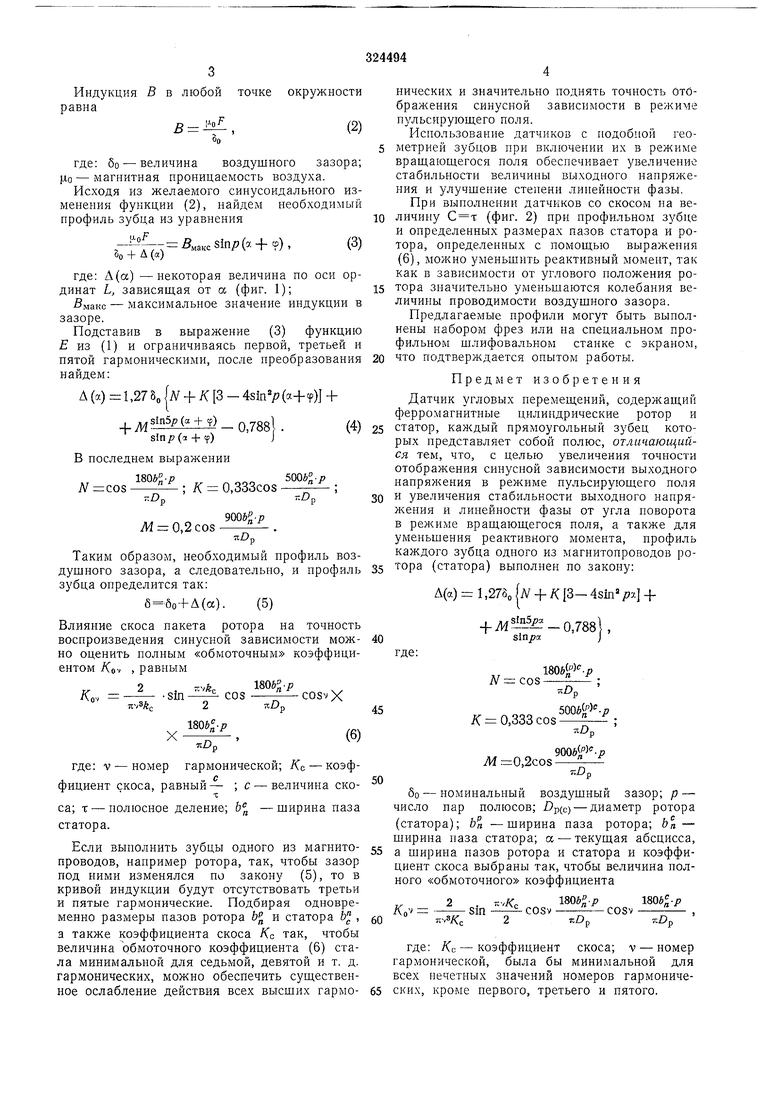
мер, ротора; крпвой / показан требуемый точный профиль зубца, а кривой 2-возмол иый приближенный проф15ль; коитур 3 изображает исходный ирофиль прямоугольного зубца,
где: а - текущая абсцисса; бо - воздушный зазор; А(а) -некоторая величина по оси ординат L, зависящая от а.
На фиг. 2 представлена развертка одного из пакетов магнитопровода, например ротора,
где: с - величина скоса; т-полюсное деление.
Если перемещений запитап в режиме пульсирующего поля со стороны ротора и имеет сосредоточеииые обмотки иа каждом зубце (полюсе), то его м.д.с. в координатах, показанных на фиг. 1, онределяется рядом Фурье:
24 -J-I / :-5/- V-L
cos( l),sm(2/e+ 1)
20
X/(a + c),
(1)
1806;;
; p - число пар полюсов; ф-
r.Dp ротора; F,n - максимальное
угол поворота
Индукция В в любой точке окружности равна
«О
D
где: бо - величина воздушного зазора; АО - магнитная проницаемость воздуха.
Исходя из желаемого синусоидального изменения функции (2), найдем необходимый профиль зубца из уравнения
.sinp(y. + о), So + Д (я)
где: А(а) -некоторая величина по оси ординат L, зависящая от а (фиг. 1);
Вмакс - максимальное значение индукции в зазоре.
Подставив в выражение (3) функцию из (1) и ограничиваясь первой, третьей и пятой гармоническими, после преобразования найдем:
А (а) 1,27 bjN + Kl3- (я+ср) +
Sjn5p(a4-f) 0,788). sin р (d + tf)J
в последнем выражении
; /C 0,333cos
Л -COS
r.Dr
9(X)
Ж -0,2 COS
n
Таким образом, необходимый профиль воздушного зазора, а следовательно, и профиль зубца определится так:
б бо+А(а). (5)
Влияние скоса пакета ротора на точность воспроизведения синусной зависимости можно оценить полным «обмоточным коэффициентом Kg; , равным
2 .,.,11 1806Р-Р К,. -47- -Sln COS COSvX
TCD
.
,
где: V - номер гармонической; Кс - коэф1 с
фициент скоса, равный- ; с - величина скоса; т - полюсное деление; 6 -ширина паза статора.
Если выполнить зубцы одного из магпитопроводов, например ротора, так, чтобы зазор под ними изменялся по закону (5), то в кривой индукции будут отсутствовать третьи и пятые гармонические. Подбирая одновременно размеры пазов ротора Ь и статора Ь, а также коэффициента скоса Кс так, чтобы величина обмоточного коэффициента (6) стала минимальной для седьмой, девятой и т. д. гармонических, можно обеспечить суш,ественное ослабление действия всех высших гармонических и значительно поднять точность отображения синусной зависимости в режиме пульсиру1ош,его ноля.
Использование датчиков с подобной гео5 метрией зубцов при включении их в режиме враш;ающегося поля обеспечивает увеличение стабильности величины выходного напряжения и улучшение степени линейности фазы. При выполнении датчиков со скосом па величину (фиг. 2) при профильном зубце и определенных размерах пазов статора и ротора, определенных с помош,ью выражепия (6), можно уменьшить реактивный момент, так как в зависимости от углового положения ротора зпачительно уменьшаются колебания величины проводимости воздушного зазора.
Предлагаемые профили могут быть выполнены набором фрез или на специальном профильном шлифовальном станке с экраном,
0 что подтверждается опытом работы.
Предмет изобретения
Датчик угловых перемещений, содержащий ферромагнитные цилиндрические ротор и
5 статор, каждый прямоугольный зубец которых представляет собой полюс, отличающийся тем, что, с целью увеличения точности отображения синусной зависимости выходного напряжения в режиме пульсирующего поля
0 и увеличения стабильности выходного напряжения и линейности фазы от угла поворота в режиме вращающегося поля, а также для уменьшения реактивного момента, профиль каждого зубца одного из магнитопроводов ро5 тора (статора) выполнен по закону:
А(а) - 1,278о (Л + 13- 4sin ру. +
+ ,788 L
Sinpa
где:
./)
cos
D,
К 0,333 cos 0„
gooft fX.j
М 0,2cos
бо - номинальный воздушный зазор; р - число пар полюсов; /5р(с) - диаметр ротора (статора); bS -ширина паза ротора; bit- ширина паза статора; а - текущая абсцисса, а ширина пазов ротора и статора и коэффициент скоса выбраны так, чтобы величина полного «обмоточного коэффициента
2 r.v/sr 1806;.
- sin - COSV: - COSV
TtDn
VtOn
гс,Кс
где: Дс - коэффициент скоса; v - номер гармонической, была бы минимальной для всех нечетных значений номеров гармониче65 ских, кроме первого, третьего и пятого.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный синусно-косинусный преобразователь перемещения | 1982 |
|
SU1147924A1 |
| РОТОР ЭЛЕКТРОМАШИННОГО СИНХРОННО-РЕАКТИВНОГО ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 1992 |
|
RU2069438C1 |
| ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1972 |
|
SU351287A1 |
| Многополюсный вращающийся трансформатор | 1984 |
|
SU1210185A1 |
| Многополюсный вращающийся трансформатор | 1988 |
|
SU1580493A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| И БИБЛИОТЕКА | 1971 |
|
SU299919A1 |
| Датчик угловых перемещений | 1974 |
|
SU567091A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |

Фиг.1
