1
Изобретение относится к автоматике и вычислительной технике и может быть (использовано для преобразования угловых перемещений в злектрический сигнал.
Известны датчики угловых перемещений, содержащие ротор и статор, представляющие собой цилиндрические магнитопроводы, разделенные воздушным зазором 1.
Недостатком известных датчико1В является сравнительно невысокая точность преобразования угловых перемещений в электрический сигнал в режиме угол - напряжение, пропорпиональное синусу угла.
Наиболее близким по технической сущности к .изобретению является датчик угловых перемещений, содержащий ферромагнитные ротор и статор, каждый прямоугольный зубец которых представляет полюс 2.
Недостатком этого датчика является подавление лишь ограниченного ряда гармоник вьгсших порядков, что отрицательно влияет на точность отображения синусной зависимости выходното напряжения.
Целью изобретения является увеличение точности отображения синусной зависимости выходного напряжения.
Для этого в предлагаемом датчике угловых перемещений ротор выполнен аксиально профилированным.
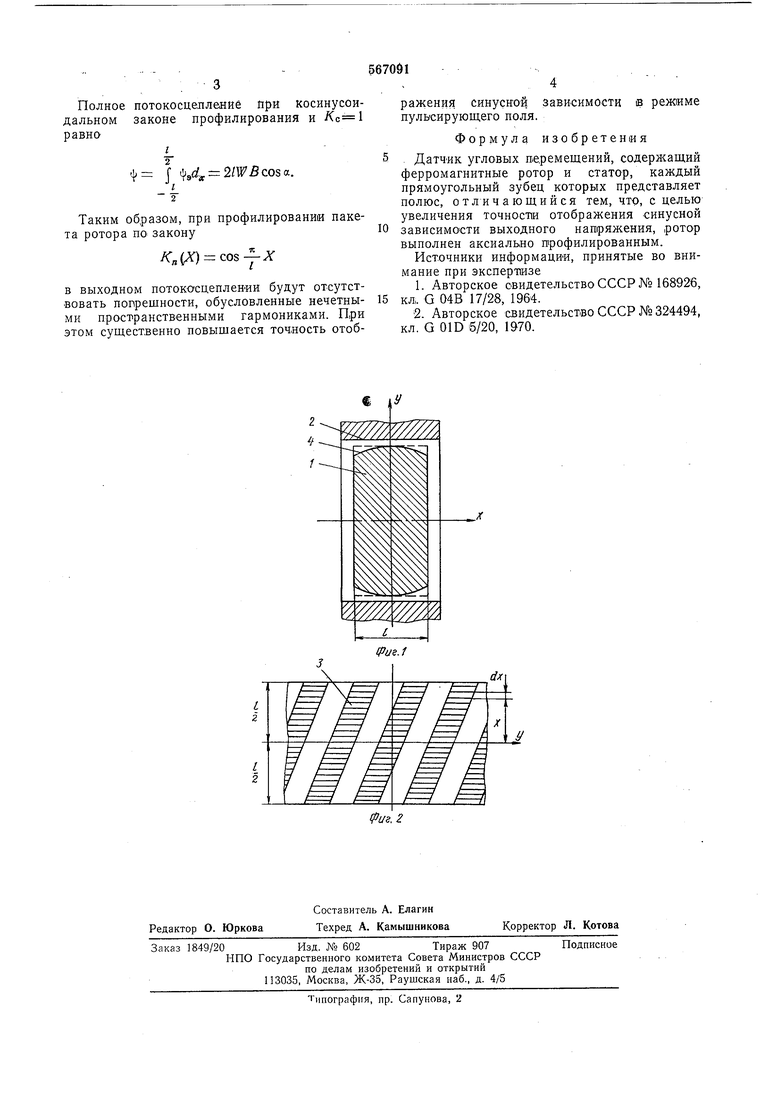
На фиг. 1 представлен предлагаемый датчик; на фиг. 2 - развертка ротора.
Датчик содержит ферромагнитные ротор I, статор 2, каждый прямоугольный зубец 3 которых представляет собою полюс, и размещенные на них обмотки (не показаны).
Ротор 1 выполнен аксиально профилированным по синусоидальному закону (кривая 4).
При работе датчика угловых перемещений в режиме пульсирующего поля потокосцеплепие обмотки статора с элементарным участком пакета ротора определяется рядом Фурье
Bk
cos(2/iC+l)X
b, 4WK(X)
2A:-t-i
X(,
B/j. - коэффициент Фурье, определяегдемый видом функции магнитодвижущей силы и проводимости ротора; Кп(Х)-функция изменения зазора по
координате X; Кс - коэффициент скоса; Vy - число витков статорной обмотки;
а - угол поворота ротора; / - длина пакета ротора; /( О, 1, 2, 3...
Полное потокосцепление При косинусоидальном законе профилирования и 0 1 равно
1
.): I gdi 2lWBcosa.
Т
Таким образом, при профилировании пакета ротора по закону
К„(Х)
в выходном потокосцеплении будут отсутствовать попрешности, обусловленные нечетными пространственными гармониками. При этом существенно повышается точность отображения синусной зависимости в режиме пульсирующего поля.
Формула изобретения
Датчик угловых перемещений, содержащий ферромагнитные ротор и статор, каждый прямоугольный зубец которых представляет полюс, отличающийся тем, что, с целью увеличения точност1и отображения синусной зависимости выходного напряжения, ротор выполнен аксиально П1рофилированным.
Источники информации, принятые во внимание при эксперт1изе
1.Авторское свидетельство СССР № 168926, кл,. G 04В 17/28, 1964.
2.Авторское свидетельство СССР № 324494, кл. G 01D 6/20, 1970.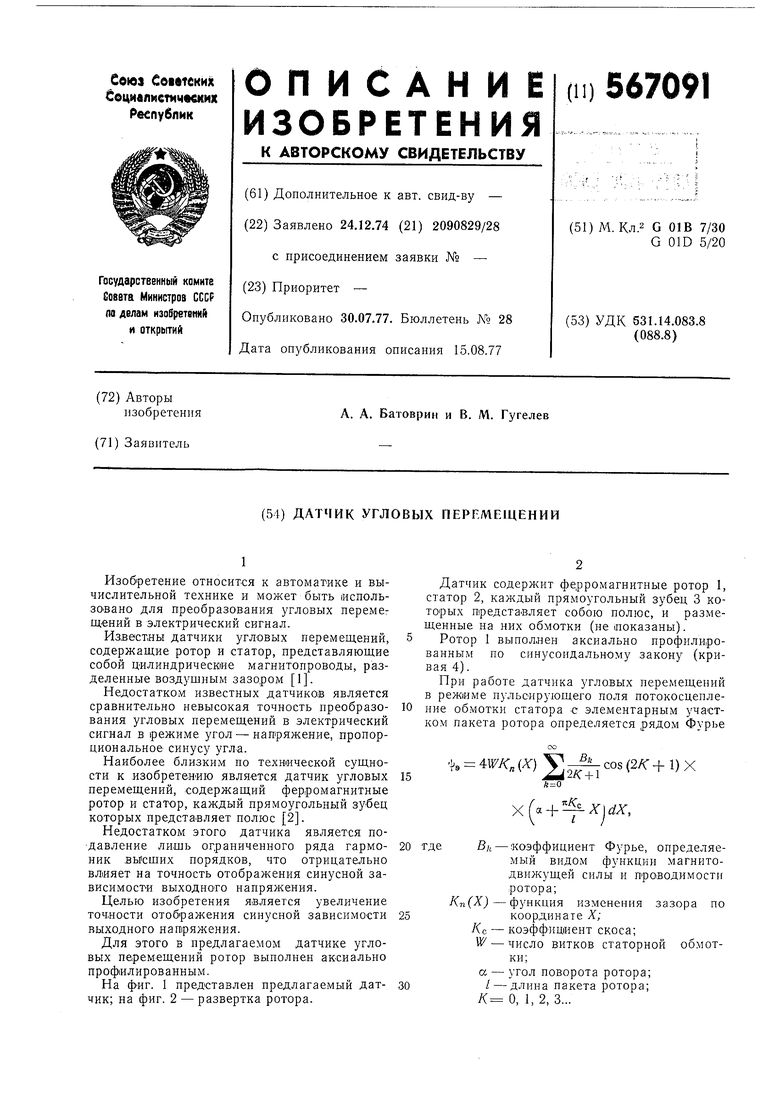
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU324494A1 |
| Синусно-косинусный датчик линейного перемещения | 1979 |
|
SU773848A1 |
| Бесконтактный синусно-косинусный преобразователь перемещения | 1982 |
|
SU1147924A1 |
| Индукционный редуктосин | 1990 |
|
SU1830597A1 |
| Вращающийся трансформатор | 1986 |
|
SU1394346A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИНДИКАТОРНОЙ ГОЛОВКИ ЭЛЕМЕНТА РАСТРОВОГО ИЗОБРАЖЕНИЯ (ВАРИАНТЫ) И ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДИСПЛЕЙ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ УКАЗАННОГО ПРИВОДА | 2012 |
|
RU2501150C1 |
| Совмещенный коллекторный двигатель-тахогенератор | 1988 |
|
SU1582288A1 |
| Двухканальный вращающийся трансформатор | 1990 |
|
SU1713037A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| Многополюсный вращающийся трансформатор | 1988 |
|
SU1580493A1 |
if
