В предлагаемок интеграторе соединенная с пантографом раздвижная штанга соединена, в свою очередь, с роликом фрикционной системы таким образом, что передвижение этого ролика по фрикционному диску является некоторой функцией наклона штанги, а вращение фрикционного диска пропорционально горизонтальному повороту штанги при обводе кривой.
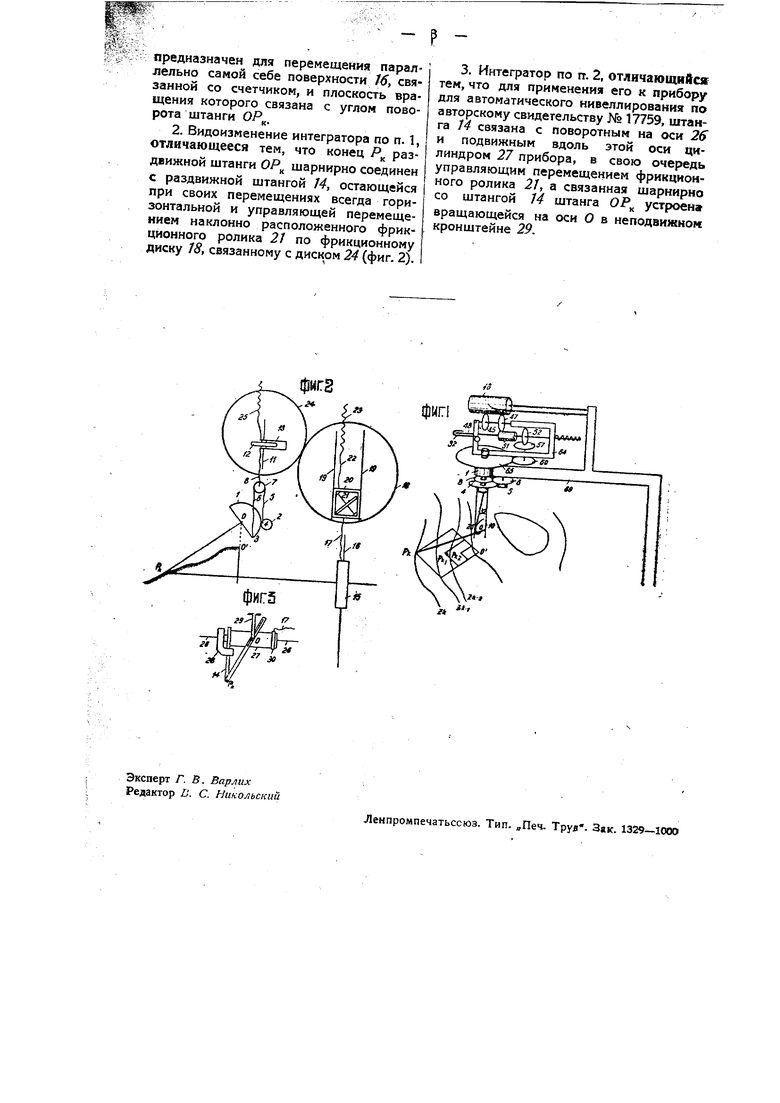
На чертеже фиг. 1 изображает схему устройства интегратора; фиг. 2 и 3 - другую форму выполнения.
Интегратор состоит из раздвижной штанги ОР вертикально вращающейся в точке О, которая ставится над точкой 0 снимаемого плана местности. Концом Р, штанги обводится горизонталь Z Штанга ОР в точке О вращается на горизонтальной оси и, кроме того, со всей ножкой fO вращается также и в горизонтальной плоскости. Ножка W вращается в кронштейне 69 на полой оси /. Со штангой ОР соединена кривая 25, на которую наматывается нить 32 пропорционально некоторой функции угла наклона штанги или сделано другое устройство для той же цели, нить 32 сквозь полую ось / проходит к муфте на оск 48, каковую и передвигает на этот угол, а с осью 48 вращает ролик 52, который фрикционно связан с диском 57.
(372)
Все эти части укреплены на раме 64, вращающейся с осью / и ножкой 70. При обводе горизонтали вращение неподвижной (на кронштейне 69) шестерней 65 и шестерней 60 на раме 64 передается диску 57.
Если результатом интеграции должен быть скаляр, то в виду того, то диференциал поворота ролика 52 пропорционален некоторой функции угла наклона штанги ОР общий поворот ролика 52 и будет искомым интегралом. Если же результатом интеграции должен быть вектор, то это достигается следующим образом. Длинною трубкою 5/, независимо от сдвижения ролика 52 и оси 48 в сторону, вращение передается шестерне 47 и ролику 45, к которому прижимается свободно скользящая во всех направлениях, но не могущая вращаться, связанная со стержнем поверхность /5, например, цилиндр, могущий скользить вдоль оси и вращаться вокруг нее. Тогда передвижение этой поверхности будет искомым векторным интегралом, так как вместе с поворотом штанги ОР поворачивается и плоскость ролика 45, перемещая соответственно и поверхность J6.
В других случаях ножку JO соединяют с осью / не наглухо, а через посредство шестерен 4, 5, 6 к 8 так, что все верхнее устройство поворачивается в два раза
2
скорее, чем штанга ОР, Для обводи следующей горизонтали пост -пают таким образом: с точкой Р соединяются пантографы PK-V к-2 опирающиеся на точку Р и уменьшающиеся в той же прогрессии как и Z Горизонталь Z обводят уже не точкой Р а точкой , горизонталь точкой панто-Графа и т. д. При этом интегратор выключают (отжимая диск 57 от ролика 52) лишь при переходе с одной горизонтали на другую. Горизонтали областей, лежащих выше, чем точка стояния, обводятся в обратную сторону. Как и в планиметрах, совершенно неважно, будет ли горизонталь окружать точку О или точка О будет вне горизонтали.
Видоизменение интегратора заключается в том, что конец раздвижной штанги, управляющей перемещением фрикционного ролика по фрикционному диску шарнирно соединен с другой раздвижной штангой, остающейся при всех перемещениях горизонтальной и управляющей перемещением рамки с наклонно расположенным фрикционным роликом по второму фрикционному диску, связанному с первым.
Раздвижная штанга ОР концом О закрепляется на соответствующей масштабу профиля высоте над началом профиля О , другой конец ее Р скользит по профилю. При помощи шестерен / и 2, эксцентриков 3 и 4, нитей 5 и 6, ролика 7 нить 8 передвигает вилочкой /5 ролик 72 около оси // (вилочка может оттягиваться пружинкой 25) и против фрикционного диска 24- С концом Р, штанги шарнирно соединена горизонтальная штанга J4, также раздвижная. Эта штанга всегда горизонтальна, что достигается, например, укреплением ее на муфте /5, скользящей вдоль рельса J6, Для вычисления вертикальной составляющей силы тяжести достаточно соединить передачей муфту /5 с диском 24; тогда повороты ролика 72 и дают искомую величину. Для определения кривизны силовых линий против диска J8 устанавливаются рельсы J9, по которым ходит рамочка 20 с наклонным роликом 27. Рамочка 20 продйигается нитью 77) муфточкой 75 против действия
i :.пружинки 22 и 25. Ролик 27 фрикционно® связан с диском J8, связанным в свою очередь с диском 24. Таким образом, нить 77 присоединяется или непосредственно к диску 24 или через механизм Г8, 19, 20 и 27.
Интегратор может быть непосредственно соединен с каким - нибудь прибором для автоматического нивеллирования. В этом случае получается тележка, которая, двигаясь по некоторому направлению, непосредственно дает гравитационное влияние рельефа местности в этом направлении.
На оси 26 нивеллира-автомат( помещается скользящая, но соединенная с цилиндром 27 часть 28, в пазу которой проходит штанга J4 интегратора. Штанга сделана зубчатой и подталкивается зубцами на цилиндре 27, управляющем в свою очередь перемещением фрикционного ролика 27.
Штанга ОР интегратора вращается в точке О на неподвижном кронштейне 29. Нить 77 интегратора соединяется или с частью 25 или с кольцом 0 карандашного устройства нивеллира-автомата.
Таким образом, соединение интегратора с нивеллиром-автоматом производится конструктивно совершенно элементарно и аналогично может быть произведено для других нивеллиров-автоматов.
Предмет изобретения.
1. Интегратор, в особенности для гравиметрических и магнитометрических вычислений, отличающийся применением раздвижной штанги ОР, служащей для обвода ее концом Р или соединенным с ним пантографом Pg,, РК-З- контуров на плане и управляющей при посредстве соответствующей передачи передвижением фрикционного ролика 52,, пропорциональным некоторой функции угла наклона штанги ОР, по фрикционному диску 57, вращение которого связано с поворотом штанги ОР при обводе ее концом по плану и пропорционально горизонтальному углу этого поворота; причем ролик 52 при посредстве соответствующей передачи служит для вращения фрикционного ролика- 5, который :: предназначен для перемещения параллельно самой себе поверхности 16, связанной со счетчиком, и плоскость вращения которого связана с углом поворота штанги ОР, 2. Видоизменение интегратора по п. 1, отличающееся тем, что конец Р раздвижной штанги ОР шарнирно соединен с раздвижной штангой М, остающейся при своих перемещениях всегда горизонтальной и управляющей перемещением наклонно расположенного фрикционного ролика 2/ по фрикционному диску fS, связанному с диском 24 (фиг. 2). 3. Интегратор по гг. 2, отличающийся тем, что для применения его к прибору для автоматического нивеллирования по авторскому свидетельству Ns 17759, штанга М связана с поворотным на оси 2 и подвижным вдоль этой оси цилиндром 27 прибора, в свою очередь управляющим перемещением фрикционного ролика 2/, а связанная шарнирно со штангой 74 штанга ОР устроена вращающейся на оси О в неподвижнок кронштейне 29.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для автоматического нивеллирования с присоединением прибора для записи плава местности | 1929 |
|
SU17762A1 |
| Прибор для автоматического нивеллирования | 1928 |
|
SU17759A1 |
| Прибор для определения кривизны буровых скважин | 1930 |
|
SU21082A1 |
| Прибор для учета гравиметрического рельефа местности | 1930 |
|
SU32175A1 |
| Гравитационный вариометр | 1930 |
|
SU35392A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО НИВЕЛЛИРОВАНИЯ | 1927 |
|
SU6856A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО НИВЕЛЛИРОВАНИЯ | 1926 |
|
SU6742A1 |
| Устройство для ориентирования рудничных съемок | 1930 |
|
SU27659A1 |
| Гравитационный вариометр | 1930 |
|
SU32747A1 |
| Гравитационные весы | 1930 |
|
SU28032A1 |