Изобретение относится к способам нзмерепия и контроля перемещений подвижных объектов.
Известны снособы измерения неремещепнй с помощью дифференциального емкостного датчика нутем измерения токов в цепи дифференциального конденсатора, подвижная пластина которого кинематически связана с перемещающимся объектом.
Оиисываемый снособ отличается тем, что измеряют разность рабочих токов датчика в режиме короткого замыкания, а сумму этих токов стабилизируют.
Это позволило повысить точность и улучщить линейность зависимости между вы.чодным нараметром и измеряемым неремещением.
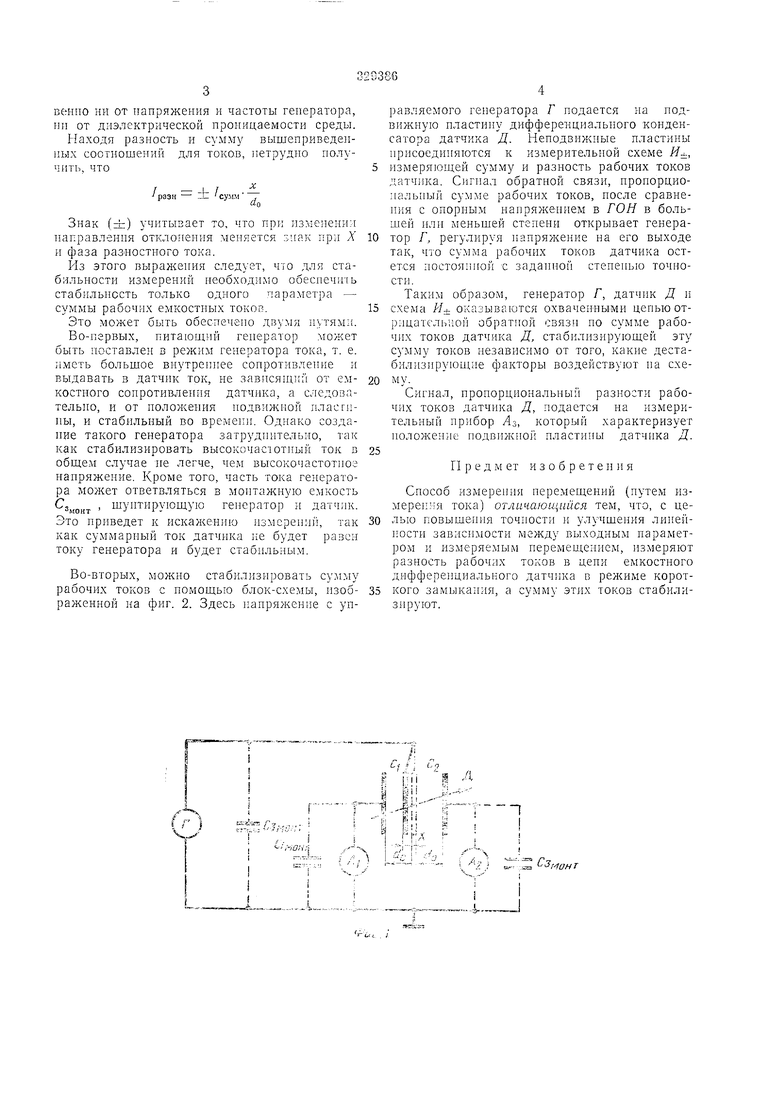
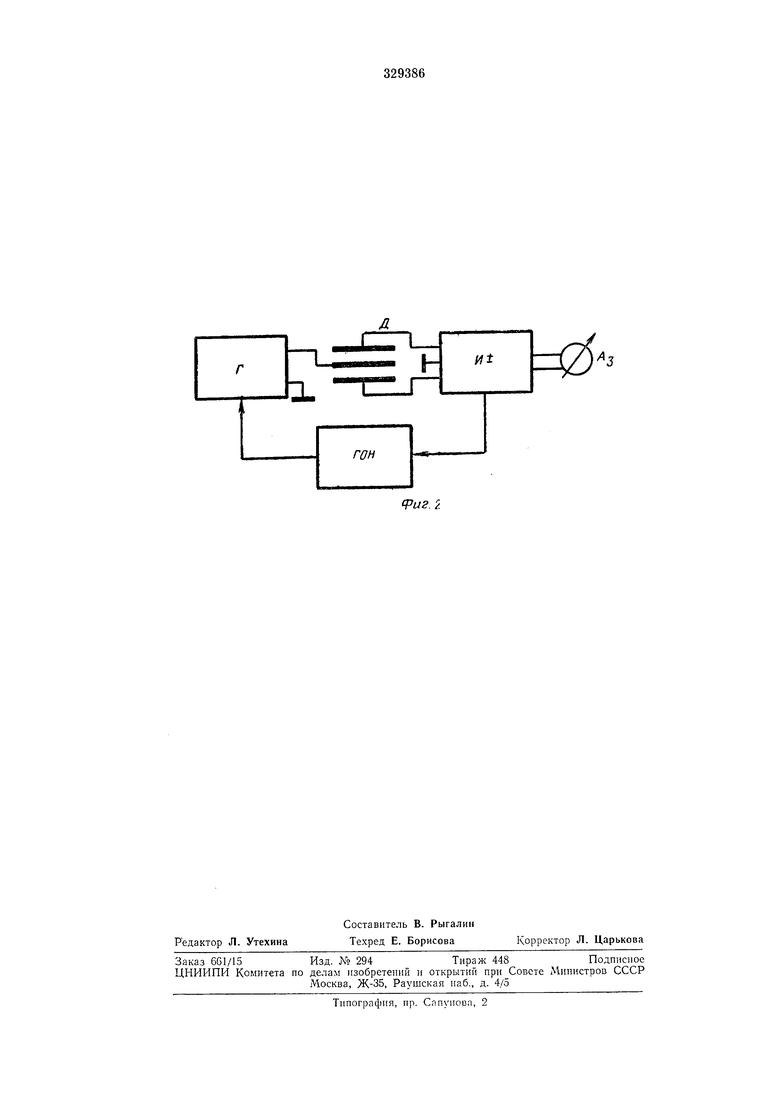
Иа фиг. 1 нриведепа эквивалентная схема, ноясняющая снособ, на фиг. 2 - блок-схема устройства, осуществляющего стабилизацию суммы рабочи.х токов.
Эквивалентная схема и блок-схема содержат генератор Г; дифференциальный датчик Д; измерительиые приборы AI-Лз и геиератор онориого нанряжения ГОН.
противление (амперметры /1| и /UO присоединены к кориусу датчика.
Если расстояния между пластинами датчика при отключении подвижной пластины от центра (см. фиг. 1) обозначить соответственно
d 1 : do-Л и t/2 о+-V,
где X - смещение иластнны, то рабочие емкостные токи при задащюм нанряженш генератора
,,,,
/о: шС2 /ге1| do-x
o.A:s5t/,e,, /1 CuCi L/reii
da+x
где «в - частота генератора Г;
Ci и Со - емкости между централы1оГ1 и крайним н пластинами днфференциалы101о конденсатора датчнка Д;
гсп - напряженне на выходе rcHepaiojia;
8 - дпэлектрическая постоянная;
К - коэфф1щиепт пропорциональности;
S - площадь пластин.
Если каким-либо образом сумму рабочи.х токов дифференциального конденсатора датчнка Д сделать постоянной н измерять разность этих токов, то измеряемый разностный ток будет зависеть только от нзмеряемого отклонення А н не будет зависеть неносредствс-гнпо ни от напряжения и частоты генератора, ни от диэлектрической нроницаемости среды. Находя разиость и сумму вышеприведенных соотношений для токов, нетрудно получить, что
разн - i су.мм
Знак (гп) учитывает то, что при изменении направления отклонения меняется знак при X и фаза разностного тока.
Из этого выралсения следует, что для стабильности измерений необходимо обеснечгпь стабильность только одного параметра - суммы рабочих емкостных токов.
Это может быть обеспечено двумя 11утями.
Во-первых, нитаюший генератор может быть поставлен в режим генератора тока, т. е. иметь большое внутреннее еонротивленне и выдавать в датчик ток, не зависяни;: от е.мкостного сопротивления датчика, а следовательно, и от иоложения иодвижиой пласгины, и стабильный во времени. Одиако создание такого генератора затрудиительио, так как стабилизировать высокочастотный TOJC в обш.е.л-1 случае не легче, чем высокочастотное напряжение. Кроме того, часть тока генератора может ответвляться в монтажную емкость
змонт шунтируюшую
генератор и датчик, Это приведет к искаженню измерени, так как суммарный ток датчика не будет равен току генератора и будет стабильным.
Во-вторых, можио стабилизировать сумму рабочих токов с иомощью блок-схемы, изображенной на фиг. 2. Здесь 1аиряжение с управляемого генератора Г подается на подвижиую пластииу дифференциального конденсатора датчика Д. Неиодвижные пластины присоедиияются к измерительной схеме И±, измеряющей сумму и разность рабочих токов датчика. Сигнал обратной связи, нронорциопальиьп сумме рабочих токов, иосле сравнения с опориым нанряжением в ГОН в большей или меньшей степени открывает генератор Г, регулируя напряжение на его выходе так, что сумма рабочих токов датчика остется иостояи1 ой С задаиной стеиеиью точности.
Таким образом, геиератор Г, датчик Д и схема И± оказываются охваченными цепью отрицательной обратной связи по сумме рабочих токов датчика Д, стабилизируюш,ей эту сумму токов иезависимо от того, какие дестабилизирующие факторы воздействуют иа схему.
Сигнал, иронорциональный разности рабочих токов датчика Д, подается на измерительиый прибор АЗ, который характеризует иоложеиие подвии-сно ; пластины датчика Д.
П р е Д м ет и з о б р е т е н ji я
Способ измереиия перемещений (путем измерения тока) отличающийся тем, что, с целью повышеиия точности и улучшения линейности зависимости между выходным параметром и измеряемым неремещением, измеряют разность рабочих токов в цепи емкостного диффере1щиального датчика в режиме короткого замыкания, а сумму этих токов стабилизируют.
f, : (,9
f: Ill ii
у gii .„.-I Jll--1 R . --fe.: s::
i A2 .2 Сз,
мин т
Ы
И±
