Изобретение относится к контрольно- измерительной технике и предназначено для автоматизации измерения и контроля различных неэлектри.ческих величин, которые могут быть преобразованы в перемеще- ние пластины дифференциального емкостного датчика.
Известно устройство для измерения перемещения, содержащее дифференциальный емкостный датчик, первый и второй усилители, выходы которых подключены к формирователю разности напряжений, опорный генератор.и источник напряжения, причём выходы опорного генератора подключены ко входам усилителей и к крайним пластинам дифференциального емкостного датчика, средняя пластина которого подключена к источнику напряжения.
Недостатком известного устройства является невысокая точность и стабильность измерений.
Наиболее близким к заявленному явля- ются преобразователь перемещения в код, содержащий дифференциальный емкостный датчик, первый и второй усилители, выходы которых подключены к крайним пластинам дифференциального емкостного датчика и ко входам формирования разности напряжений, выход которого соединен с информационным входом аналого-цифро- вого преобразователя, тактовый генератор, подключенный к запускающему входу формирователя временных интервалов, и источник напряжения, подключенный ;со входам усилителей v. к средней пластине дифференциального емкостного датчика через ключ, управляющий вход которого соединен с первым выходом формирователя временных интервалов, второй выход которого подключен к управляющему входу аналого- цифрового преобразователя.
Недостатком известного преобразователя также является невысокая точность и стабильность измерений, обусловленная невысокой точностью аналоговых измери- тельных схем и зависимостью параметров формирователя временных интервалов и интеграторов от питающих напряжений и пороговых напряжений срабатывания, температуры и влажности. Кроме того, использо вание аналого-цифрового преобразователя на выходе блока сравнения (формирователя разности напряжений) вносит дополнительную погрешность.
Цель изобретения - повышение точности преобразователя перемещения в код.
. Поставленная цель достигается тем, что в преобразователь перемещения в код, содержащий дифференциальный емкостный датчик с двумя неподвижными и одной подвижной пластинами, первый и второй усилители, выходы которых соединены соответственно с первым, и вторым входами блока вычитания, первый, токоограничивающий
элемент, введены делитель частоты, цифровой частотомер и пять токоограничивающих элементов, блок вычитания выполнен в виде блока вычитания частот, каждая из неподвижных пластин дифференциального емко0 стного датчика выполнена в виде трех одинаковых изолированных секций, первые крайние секции первой и второй неподвижных пластин дифференциального емкостного датчика соединены с первыми входами
5 соответственно первого и второго усилителей и с первыми выводами соответственно первого и второго токоограничивающих элементов, вторые выводы которых соединены со средними секциями соответствен0 но первой и второй неподвижных пластин дифференциального емкостного датчика к с первыми выводами соответственно третьего и четвертого токоограничивающих элементов, вторые выводы которых соединены
5 со вторыми крайними секциями соответственно первой и второй неподвижных пластин дифференциального емкостного датчика и с первыми выводами соответственно пятого и шестого.токоограничиваю0 щих элементов, вторые выводы которых соединены с выходами соответственно первого и второго усилителей, выход блока вычитания частот через делитель частоты соединен со входом цифрового частотоме5 ра, выход которого является выходом преобразователя, подвижная пластина дифференциального емкостного датчика и вторые входы первого и второго усилителей соединены с общей шиной.
0 На чертеже приведена функциональная схема преобразователя перемещения в код, Преобразователь содержит дифференциальный емкостный датчик 1, образованный подвижной пластиной 2 и секциями 3-8
5 неподвижных пластин, токоограничиваю- щие элементы, выполненные в виде резисторов 9-14, усилители 15, 16, общую шину 17, блок 18 вычитания частот, делитель частоты 19 и цифровой частотомер 20.
0 Подвижная пластина 2 совместно с сек- . цмями 3-5, резисторами 9-11 и усилителем 15 образует RC-генератор 21, эта же подвижная пластина 2 совместно с секциями 6-8, резисторами 12-414 и усилителем 16
5 образуют RC-генератор 22.
Преобразователь работает следующим образом.
В каждом цикле измерения производится измерение разности частот RC-генерато- ров 21, 22, цепи положительной обратной
связи которых образуются емкостями дифференциального емкостного датчика 1 и резисторами 9-14, благодаря чему измеренное значение разности частот выходных напряжений RC-генераторов 21-22 становится пропорциональным измеряемому перемещению.
Частоты fi и faRC-гёнераторов 21 и 22, в которых в качестве чартотозадающих емкостей используются плечевые емкости Ci и С2 дифференциального емкостного датчика 1, будут равны:
t 1 d0 + Ad .
f2
2яР Ci 2nR m 1 do-Ad 2 л: R C2 2 JT R m
где dp - расстояние между неподвижными 9-11 и 12-14 секциями и подвижной 2 пластинами в среднем положении последней:
Ad- измеряемое перемещение
m - конструктивный параметр, зависящий от конструкции емкостного датчика 1 и площади секций 3-9;
R - сопротивление резисторов 9-14.
Из (1) следует, что разностная частота f на выходе блока 18 вычитания частот будет пропорциональна измеряемому перемещению.
fi-fi- M;(2)
f
л: Km
откуда измеряемое перемещение будет равно.
Л d K0f,(3) где Ко . JiRm - коэффициент пропорциональности.
Таким образом, используя плечи дифференциального емкостного датчика 1 в качестве частотозадающих емкостей RC-генераторов 21, 22 и измеряя разность частот RC-генераторов 21, 22, получим линейную зависимость между измеряемой разностной частотой и измеряемым перемещением.
Начальная частота foRC-генераторов 21,22, соответствующая исходному среднему положению средней пластины 2 датчика 1, выбирается так, чтобы обеспечить необ ходимую точность и разрешающую способность измерений. Величина fo согласно (1) равна
dc
10 2JTRm откуда для Ко следует выражение
Ко flcRm
do 2Т0
Согласно (3) погрешность д d измерения перемещения определяется погрешностью д f измерения разностной частоты f при выбранном коэффициенте Ко,
5а- к0( a f
Ј. То
(5)
30
5Для разрешающей способности A d измерения, равной такому изменению величины перемещения, при котором показания цифрового частотомера 20 изменяются на единицу, в соответствии с (3) и (4) получаем
10 Ad . (6)
°
Из (5) и (6) следует, что точность и разрешающая способность измерений при выбранной исходной величине зазора do
5 определяются начальной частотой fo RC-генераторов 21,22, причем они тем выше, чем ; выше частота fo.
При включении устройства RC-генера- торы 21 и 22 работают в непрерывном режи20 ме, генерируя синусоидальные напряжения, частота которых определяется положением подвижной средней пластины 2 дифференциального емкостного датчика 1. причем при перемещении пластины 2 чз25 стоты RC-генераторов 21, 22 изменяются в противоположных направлениях, Напряже нйя RC-генераторов 21. 22 поступают на входы блока 18 вычитания частот, на выходе; которого формируется напряжение разностной частоты, пропорциональной с.мещению средней пластины 2 датчика, 1 от исходного положения равновесия.
Разностная частота выходного напряжения блока 18 с помощью масштабного
35 делителя 19 частоты уменьшается в заданное число раз и поступает на цифровой частотомер 2Q где измеряется и индицируется на цифровом индикаторе. При этом, как следует из выражения (3), коэффициент деле40 ния масштабного делителя частоты 19 должен равняться К0.
Масштабный делитель частоты 19 служит для согласования максимальной часто45 Ты сигнала на выходе блока 18, соответствующей максимальному измеряе- мому перемещению, с минимальной емкостью счетчика цифрового частотомера 20, величина которой равна максимальному пе50 ремещению пластины 2, измеряемому в каких-либо единицах, например, микронах. Иными словами, масштабный делитель частоты 19 нужен для того, чтобы независимо от выбора частоты RC-генераторов 21, 22
55 частота сигнала, поступающего на вход цифрового частотомера 20, а значит и показания частотомера 20 были равны величине измеряемого перемещения в микронах. Реализуется блок 19 в виде каскадного соединения .
необходимого числа триггеров со счетным входом. .
Цифровой частотомер 20 работает циклически, периодически измеряя частоту непрерывно поступающего на его вход импульсного напряжения разностной частоты f, и предназначен для измерения и цифровой индикации частоты поступающих- на его вход импульсных сигналов с выхода масштабного делителя частоты 19. Типовая структурная схема цифрового частотомера включает в себя счетчик импульсов, блок формирования временных интервалов (таймер) и индикатор. В принципе путем регули- рования определяемого таймером временного интервала подсчета числа импульсов, поступающих на счетчик, можно добиться равенства числа поступающих на счетчик импульсов величине перемещения в микронах. При этом отпадает необходимость в масштабном делителе 19 частоты, однако при этом может быть не обеспечена разрешающая способность измерения.
Частота импульсного сигнала на выходе блока 18 вычитания частот равна модулю разности частот RC-генераторов 21 и 22, что соответствует использованию в качестве рабочего перемещения подвижной пластины 2 в ту иди другую сторону от исходного положения равновесия. В этом случае макси- мальная величина измеряемого перемещения равна примерно d0. Для расширения в два раза линейного рабочего ди- апазона измеряемых перемещения существует две возможности.
Во-первых, можно определить алгебраическую разность частот RC- генераторов 21 и 22. В этом случае в блок 1.8 необходимо ввести узел для фиксации изменения на зтфазы сигнала разностной частоты при переходе подвижной пластины 2 через среднее положение и учета этого изменения путем изменения знака показаний цифрового частотомера 20. При этом возникает необходимость введения также цифрового вычислительного узла, обеспечивающего нулевое показание цифрового индикатора перемещения при нахождении пластины 2 в одном из крайних положений несмотря на нулевое
показание счетчика частотомера 20.
Во-вторых, путем изменения номинала R резисторов 9-11 или 12-14 одного из RC- генераторов 21, 22 можно обеспечить равенство частот RC-генёраторов 21, 22 в
одном из крайних положений подвижной средней пластины 2 дифференциального емкостного датчика 1. При этом показания цифрового частотомера 20 будут равны 0. Этот путь расширения в два раза измеряемого диапазона перемещений наиболее простой и практически наиболее приемлемый..
..А
Используемая при обработке измёри-
тельного сигнала частота RC-генераторов . 21,22 зависит только от параметров датчика 1 и резисторов 9-14, может быть выбрана точно и стабилизирована путем использования высокоточных и высокостабильных резисторов 9-14. Изменения температуры и влажности окружающей среды вызывают одинаковые изменения частоты обоих RC- генераторов 21,22 и эти изменения частоты будут взаимно компенсироваться в блоке 18
вычитания частот. При этом частота RC-генераторов 21, 22 задается резисторами 9- 14, исходя из заданной разрешающей способности измерений. В результате точность и стабильность преобразователя повышаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1990 |
|
RU2101860C1 |
| Преобразователь перемещения в код | 1982 |
|
SU1057975A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАДАННОЙ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ | 2004 |
|
RU2258341C1 |
| Преобразователь перемещения в частоту | 1985 |
|
SU1317283A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА | 2016 |
|
RU2665753C2 |
| Устройство для измерения перемещений | 1978 |
|
SU1002812A1 |
| Устройство двухзондового измерения фазовых сдвигов распределённой RC-структуры | 2018 |
|
RU2695030C1 |
| Цифровой вискозиметр | 1984 |
|
SU1213383A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕТАНА И ДРУГИХ ГОРЮЧИХ ГАЗОВ | 1991 |
|
RU2013565C1 |
Изобретение относится к контрольно- измерительной технике и предназначено для автоматизации измерения и контроля различных неэлектрических величин, которые могут быть преобразованы в перемеще- ние пластины дифференциального емкостного датчика. Целью изобретения является повышение точности преобразователя перемещения в код. С этой целью в преобразователь перемещения в код, содержащий дифференциальный емкостный датчик 1 с двумя неподвижными и одной подвижной 2 пластинами, два усилителя 15, 16, блок вычитания, первый токоограничи- вающий элемент, выполненный в виде резистора 9, введены делитель 19 частоты, цифровой частотометр 20 и пять токоогра- ничивающих элементов, выполненных в виде резисторов 10-14, блок вычитания выполнен в виде блока вычитания частот, каждая из.неподвижных пластин дифференциального емкостного датчика выполнен в виде трех одинаковых изолированных секций 9-11 и 12-14, которые совместно с подвижной пластиной 2 и соответствующими усилителями 15,16 образуют два RC-генера- тора 21, 22. Благодаря этому исключается влияние напряжения питания, изменений температуры и влажности окружающей среды на точность измерения. 1 ил. f .я ел С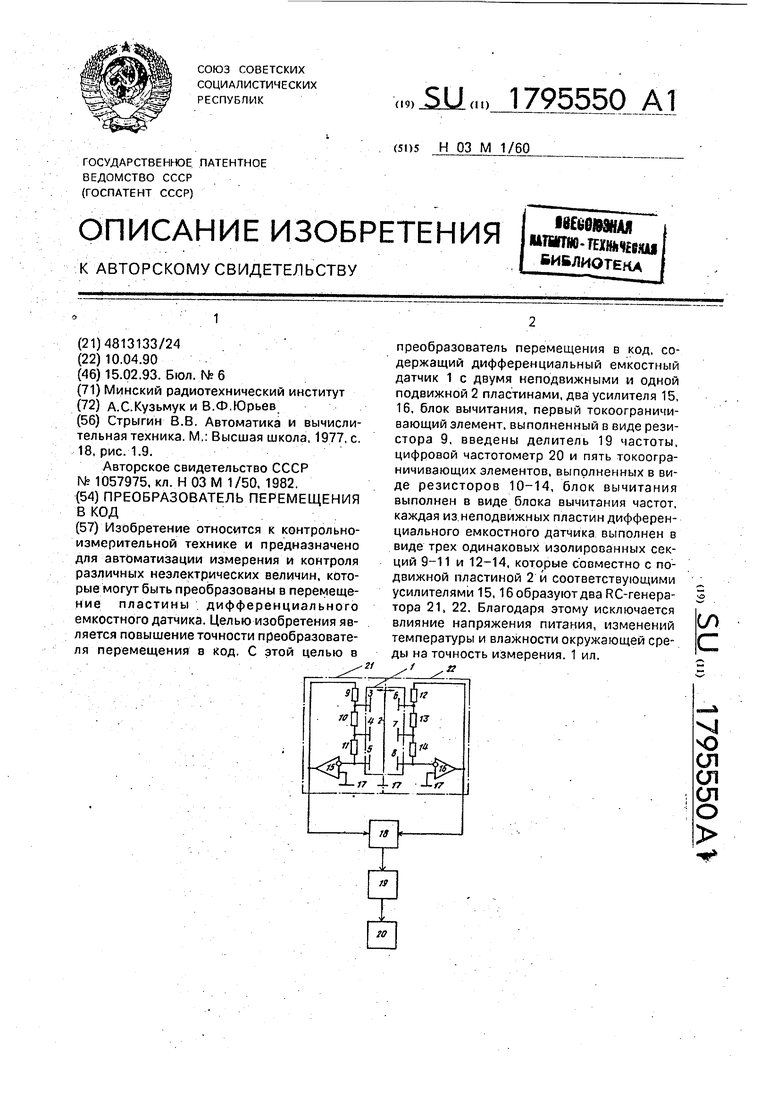
. Формул а изобретения
Преобразователь перемещения в код содержащий дифференциальный емкостный датчик с двумя неподвижными и одной подвижной пластинами, первый и второй усилители, выхоДы которых соединены соответственно с первым и вторым входами блока вычитания, первый токоограничивающий элемент, отличающийся тем, что, с целью повышения точности преобразователя, в него введены делитель частоты, цифровой частотомер и пять токоограничивающих элементов, блок вычитания выполнен в виде блока вычитания частот, каждая из неподвижных пластин дифференциального емкостного датчика выполнена в виде трех одинаковых изолированных секций, первые
крайние секции первой и второй неподвижных пластин дифференциального емкостного датчика соединены с первыми входами соответственно первого и второго усилителей и с первыми выводами соответственно первого и второго токоограничивающих элементов, вторые выводы которых соединены со средними секциями соответственно первой и второй неподвижных пластин дифференциального емкостного датчика и с первыми выводами соответственно третьего и четвертого токоограничивающих элементов, вторые выводы которых соединены с вторыми крайними секциями соответственно первой и второй неподвижных пластин дифференциального емкостного датчика и с первыми выводами соответственно пятого и
шестого токоограничивающих элементов, ляется выходом преобразователя, подвиж- вторые выводы которых соединены с выхо- ная пластина дифференциального емкост- дами соответственно первого и второго уси- ного датчика и вторые входы первого и лителей, выход блока вычитания .частот второго усилителей соединены с общей ши- через делитель частоты соединен с вводом ной. цифрового частотомера, выход которого яв
| Стрыгин В.В | |||
| Автоматика и вычислительная техника | |||
| М.: Высшая школа, 1977, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещения в код | 1982 |
|
SU1057975A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
