Известны редукторные электродвигатели постоянного тока с полупроводниковым коммутатором, управляемым датчиком положения ротора. Они отличаются малым моментом инерции, большой плавностью хода и т. д.
Цель изобретения - повысить надежность. Для этого датчик положения выполнен в виде системы контактов, взаимодействующих с зубцами ротора, причем контактные группы смещены на треть зубцового деления ротора.
Управление контактными группами управляющего устройства осуществлено непосредственно механическим воздействием зубцов ротора.
Управляющее устройство закреплено на статоре двигателя подвижно с угловым разворотом его относительно электрической нейтрали на угол, равный зубцовому делению ротора.
В случае применения тиристоров контакты, управляющие запиранием тиристоров, закреплены в управляющем устройстве подвижно относительно контактов, управляющих отпиранием тиристоров, в плоскости, перпендикулярной оси ротора двигателя, с обеспечением их разворота на угол, равный одной трети зубцового деления ротора.
стоянного тока; на фиг. 2 - электрическая схема двигателя с полупроводниковыми триодами.
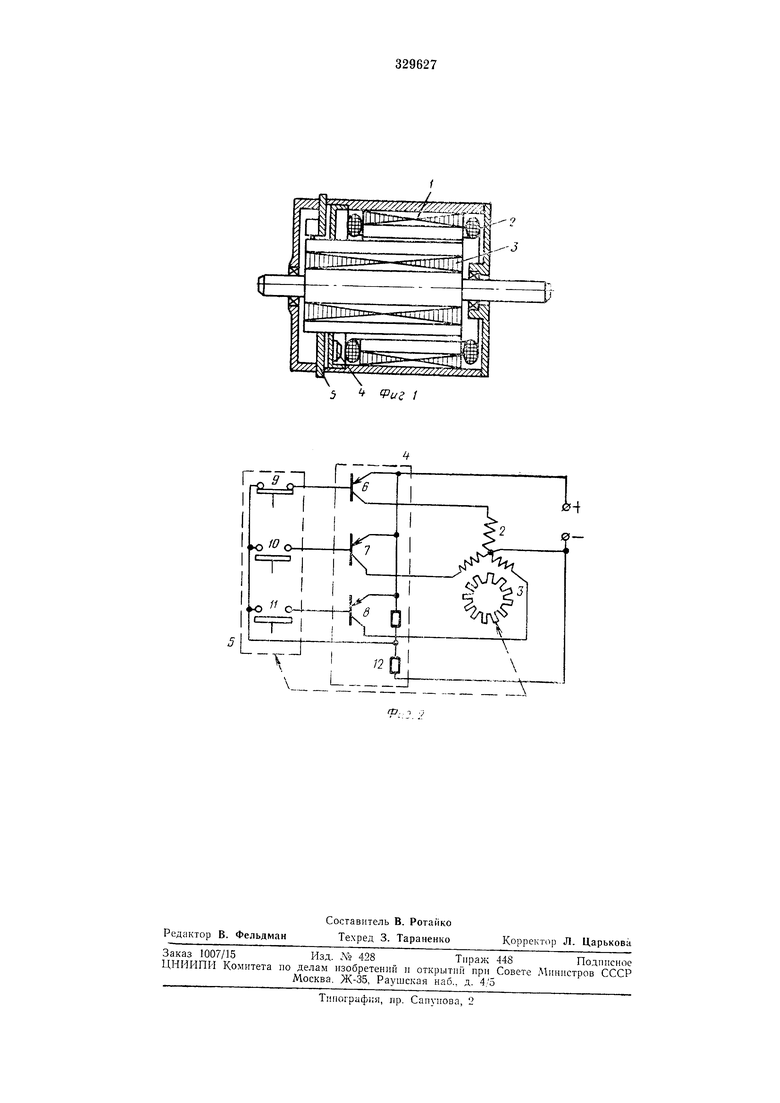
Редукторный электродвигатель постоянного тока состоит из редукторного двигателя реактивного типа, который имеет статор 1 с трехфазной обмоткой 2 и ротор 3 без обмотки, полупроводникового коммутатора 4 и управляющего устройства 5.
Полупроводниковый коммутатор состоит из трех триодов 6-8 (фиг. 2) и жестко соединен с корпусом статора двшателя.
Управляющее устройство состоит из трех контактных групп 9-//, например концевых выключателей. Контактные группы соединены с корпусом контактного устройства, который подвижно соединен с корпусом статора двигателя. Контактные группы сдвинуты относптельно друг друга на определенный угол. Величина этого сдвига для каждой последующей группы относительно предыдущей равна:
360 /г, , 1
К Чградусов
ZP V ™ /
ротором и
двигателей с возоужденным
для 360
где Zp - число зубцов ротора, К 1,2,3. . .1-1/
m - число фаз в статорной обмотке.
При этом необходимо учитывать, что m Ji 3 для двигателей с возбужденным ротором и Ш:;гЗ и не кратно 2 для двигателей с певозбужденным ротором.
Подвижное соединение кориуеа контактного устройства с корпусом статора двигателя дает возможность осуществлять регулировку и реверс двигателя за счет разворота контактного устройства относительно элекрической нейтрали. Для осуществления иолного реверса необ.кодимо обеснечить разворот на угол в пределах одного зубцового деления ротора, так как редукторные двигатели выполняются обычно с большим числом зубцов. Величина этого угла небольшая, и данный метод регулировки легко осуществить. Каждая контактная группа для триодного коммутатора состоит из системы контактов 9-//, которые управляют отпиранием и запиранием триодов.
Как видно из фиг. 1, контактные группы установлены на корпусе управляющего устройства таким образом, что управление их включением и выключением осуществляется зубцами ротора двигателя, что значительно упрощает конструкцию двигателя.
Принцип действия двигателя заключается в следующем. При подключении к источнику питания двигателя с полупроводниковым коммутатором на триодах происходит включение одного из триодов. В положении показаином на фиг. 1 замкнута контактная группа 9, при этом минус с делителя 13 имеется на базе триода 6 и обеспечивает его полное открытие, благодаря чему одна из фаз двигателя находится иод полным напряжением сети. В результате образуется магнитное поле, которое, взаимодействуя с ротором двигателя, создает электромагнитный момент. Под действием этого момента ротор стремится повернуться в положение максимальной магнитной проводимости например ио часовой стрелке. При этом происходит замыкание контактной группы 10, открывается триод 7, возбуждается следуюИ1ая фаза статорпой обмотки. После размыкания контактов группы 9 и закрытия триода 6 ; сктор магнитпого поля поворачивается на 120, что вызывает дальнейщее вращение ротора, замыкание контактной групиы 11 и размыкание 10. За одни оборот вектора магнитного поля ротор поворачивается на два зубповых деления ротора. При выполпеиии коммутатора с полупроводниковым коммутатором па тиристорах работа двигателя происходит аналогично (отличие заключается в работе управляющего устройства).
П р е ;, м е т и з о б р е т е и и я
Редукто)нып электродвигатель постоянного тока, содержащий синхрониую редукторную машину, подключенную к источнику питаиия через иолупроводниковый коммутатор, управляе.мый датчиком положения ротора, отличающийся тем, что, с целью повышения надежности, датчик положения выполнен в виде системы контактоБ, укреплеппых на статоре машпны, и замыкающих подвижных контактов, взаююдействующих с зубцами ротора.
2. Электродвигатель по п. 1, отличающийся тем, что подвижпые контакты связаны с зубцами посредством тяг, сдвинутых взаимно на треть полюсного деления ротора.
й
11Т1111Ш1в -- «ДШ11Ш
5 /
шж
жш
эшЛш1
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1969 |
|
SU248049A1 |
| Вентильный электродвигатель | 1988 |
|
SU1552302A1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2393614C1 |
| РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2477917C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416858C1 |
| Редукторная машина с полупроводниковым коммутатором | 1985 |
|
SU1334301A1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437198C1 |
| Вентильный электродвигатель | 1985 |
|
SU1403268A1 |
| Вентильный электродвигатель | 1985 |
|
SU1403267A1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
Г
