Известны устройства для регистрации относительного перемещения двух подвижных объектов, содержащие датчик перемещений, например емкостный потенциометр, электроды которого, укрепленные на одном из подвижных объектов, соединены выводами вторичной обмотки питающего трансформатора, подключенного к генератору переменного папряжения, а электрод, укрепленный на втором подвижпом объекте, подключен к усилителю с индикатором.
Предложенное устройство отличается тем, что оно содержит компенсирующий генератор переменного напряжения, синхронизируемый по фазе с питающим генератором, причем один из зажимов компенсирующего генератора заземлен, а второй подключен к нулевым выводам питающего трансформатора.
Благодаря этому повыщается точность регистрации при работе устройства в области звуковых частот.
Кроме того, в устройстве компенсирующий генератор переменного напряжения содержит последовательно включенные согласующий и декадные трансформаторы с секционированными первичными обмотками, выводы которых соединены с контактами селекторного переключателя установки пуля и переключателя положения. Первичная обмотка согласующего трапсформатора подключена к отводам вторичной обмотки питающего трансформатора, а отвод от первичной обмотки согласующего трансформатора соединен с одним из выводов вторичной обмотки первого декадного трансформатора.
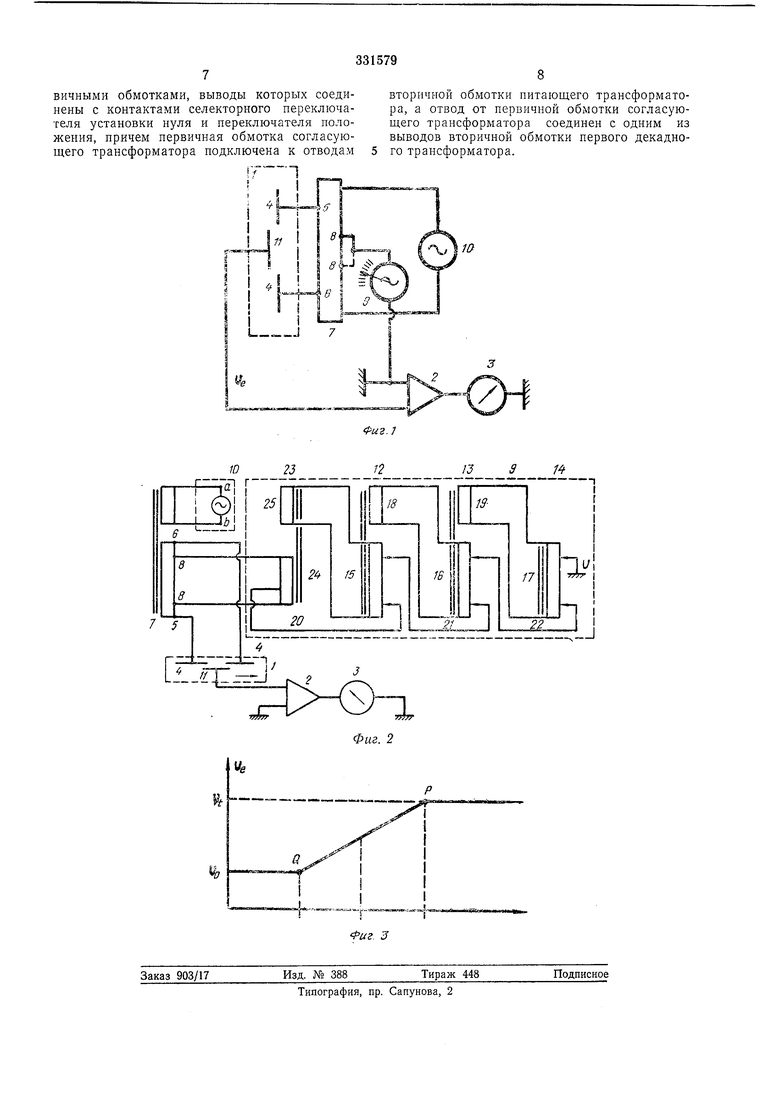
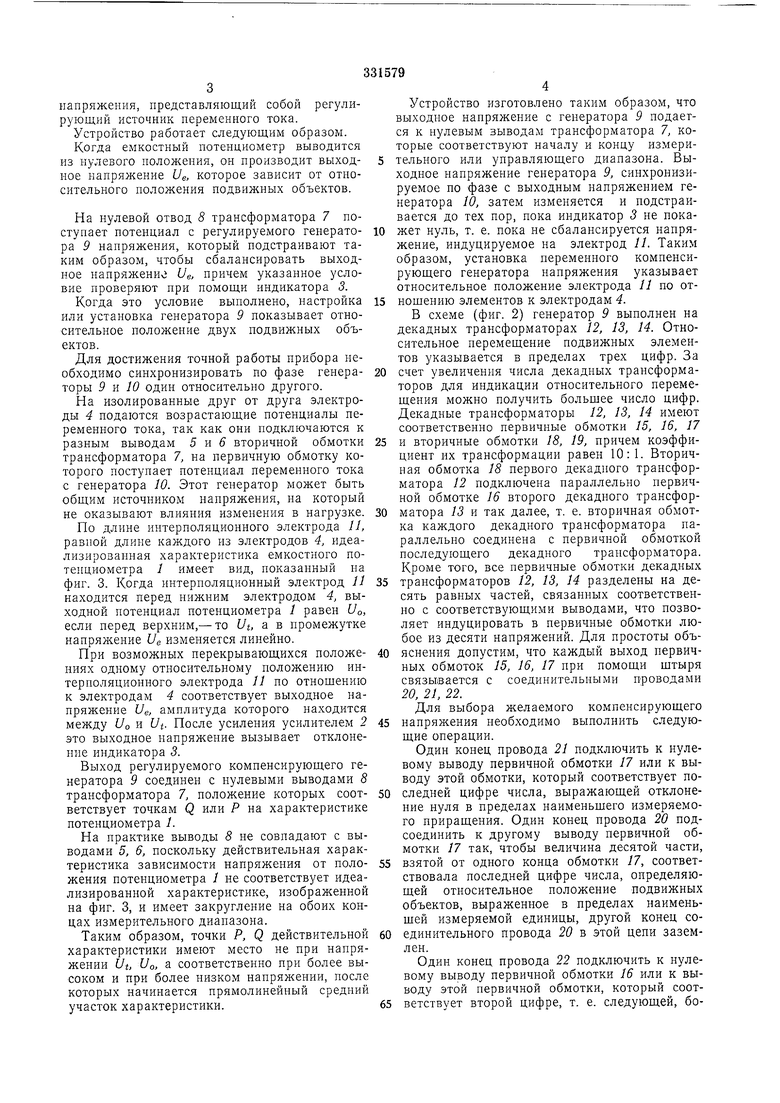
На фиг. 1 приведена блок-схема устройства; на фиг. 2 представлен вариант схемы устройства; на фиг. 3 изображена идеализированная характеристика датчика, например емкостного потенциометра.
Устройство содержит емкостный нотенциометр 1, усилитель 2, индикатор 3, укрепленные на одном из подвижных объектов электроды 4 потепциометра 1, которые подключены к выводам 5 и 6 вторичной обмотки трансформатора 7, подсоединенный к пулевым выводам 8 трансформатора 7 компенсирующий генератор 9, генератор 10 переменного тока и укрепленный па втором объекте иптерполяцпопный электрод 11 потенциометра.
Питание на емкостный потенциометр поступает с выводов 5 и 6 вторичной обмотк) трансформатора 7, первичная обмотка которого подключена к генератору 10.
Напряжение с выхода емкостного иотепцпометра подается па усилитель 2, сигнал с которого поступает па индикатор 3.
напряжения, представляющий собой регулирующий источник неременного тока.
Устройство работает следующим образом.
Когда емкостный потенциометр выводится из нулевого пололсения, он производит выходное напряжение Ue, которое зависит от относительного ноложения подвижных объектов.
На нулевой отвод 8 трансформатора 7 ноступает потенциал с регулируемого генератора 9 нанряження, который подстраивают таким образом, чтобы сбалансировать выходное напряжение Ue, причем указанное условие проверяют при помощи индикатора 5.
Когда это условие вынолнено, настройка или установка генератора 9 показывает относительное положение двух подвижных объектов.
Для достижения точной работы прибора необходимо синхронизировать по фазе генераторы 9 к 10 один относительно другого.
На изолированные друг от друга электроды 4 подаются возрастающие потенциалы переменного тока, так как они подключаются к разным выводам 5 и б вторичной обмотки трансформатора 7, на первичную обмотку которого поступает потенциал переменного тока с генератора 10. Этот генератор может быть общим источником напряжения, на который не оказывают влияния изменения в нагрузке.
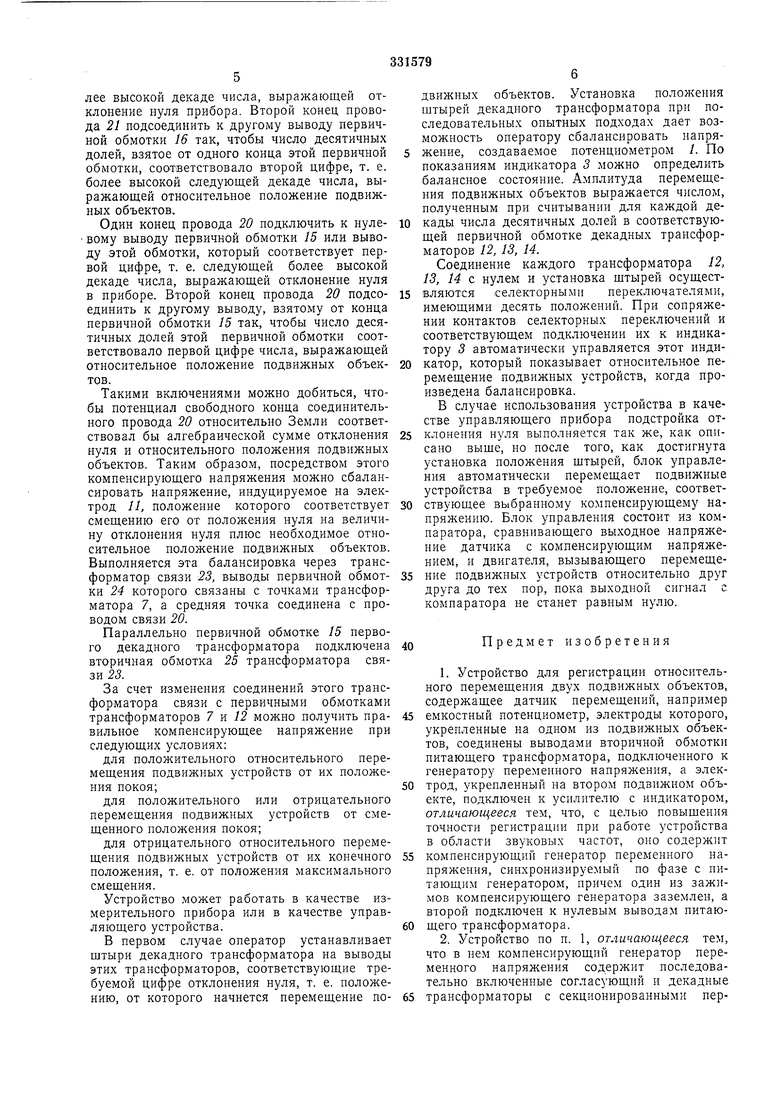
По длине интерполяционного электрода 11, равной длине каждого из электродов 4, идеализированная характеристика емкостного потенциометра 1 имеет вид, показанный на фиг. 3. Когда интерполяционный электрод 11 находится перед нижним электродом 4, выходной потенциал потенциометра 1 равен Uo, если перед верхним,- то Vt, а в промежутке напряжение Ug изменяется линейно.
При возможных нерекрывающихся положениях одному относительному положению интерполяционного электрода 11 по отнощению к электродам 4 соответствует выходное напряжение Ve, амплитуда которого находится между Но и Ut. После усиления усилителем 2 это выходное напряжение вызывает отклонение индикатора 3.
Выход регулируемого компенсирующего генератора 9 соединен с нулевыми выводами 8 трансформатора 7, положение которых соответствует точкам Q или Р на характеристике потенциометра 1.
На практике выводы 8 не совпадают с выводами 5, 6, поскольку действительная характеристика зависимости напряжения от положения потенциометра / не соответствует идеализированной характеристике, изображенной на фиг. 3, и имеет закругление на обоих концах измерительного диапазона.
Таким образом, точки Р, Q действительной характеристики имеют место не при нанряжении Uf, Uo, а соответственно при более высоком и при более низком напряжении, после которых начинается прямолинейный средний участок характеристики.
Устройство изготовлено таким образом, что выходное напряжение с генератора 9 подается к нулевым выводам трансформатора 7, которые соответствуют началу и концу измерительного или управляющего диапазона. Выходное напряжение генератора 9, синхронизируемое по фазе с выходным напряжением генератора 10, затем изменяется и подстраивается до тех пор, пока индикатор 3 не покажет нуль, т. е. пока не сбалансируется напряжение, индуцируемое на электрод 11. Таким образом, установка переменного компенсирующего генератора напряжения указывает относительное положение электрода 11 по отнощению элементов к электродам 4.
В схеме (фиг. 2) генератор 9 выполнен на декадных трансформаторах 12, 13, 14. Относительное перемещение подвижных элементов указывается в пределах трех цифр. За
счет увеличения числа декадных трансформаторов для индикации относительного перемещения можно получить большее число цифр. Декадные трансформаторы 12, 13, 14 имеют соответственно первичные обмотки 15, 16, 17
и вторичные обмотки 18, 19, причем коэффициент их трансформации равен 10:1. Вторичная обмотка 18 первого декадного трансформатора 12 подключена параллельно первичной обмотке 16 второго декадного трансформатора 13 и так далее, т. е. вторичная обмотка каждого декадного трансформатора параллельно соединена с первичной обмоткой последующего декадного трансформатора. Кроме того, все первичные обмотки декадных
трансформаторов 12, 13, 14 разделены на десять равных частей, связанных соответственно с соответствующими выводами, что позволяет индуцировать в первичные обмотки любое из десяти напряжений. Для простоты объяснения допустим, что каждый выход первичных обмоток 15, 16, 17 нри помощи щтыря связывается с соединительпыми проводами 20, 21, 22. Для выбора желаемого компенсирующего
напряжения необходимо выполнить следующие операции.
Один конец провода 21 подключить к нулевому выводу первичной обмотки 17 или к выводу этой обмотки, который соответствует последней цифре числа, выражающей отклонение нуля в пределах наименьщего измеряемого приращения. Один конец провода 20 подсоединить к другому выводу первичной обмотки 17 так, чтобы величина десятой части,
взятой от одного конца обмотки 17, соответствовала последней цифре числа, определяющей относительное положение подвижных объектов, выраженное в пределах наименьшей измеряемой единицы, другой конец соединительного провода 20 в этой цепи заземлен.
лее высокой декаде числа, выражающей отклонение нуля прибора. Второй конец провода 21 подсоединить к другому выводу первичной обмотки 16 так, чтобы число десятичных долей, взятое от одного конца этой первичной обмотки, соответствовало второй цифре, т. е. более высокой следующей декаде числа, выражающей относительное положение подвижных объектов.
Один конец провода 20 подключить к нулевому выводу первичной обмотки 15 или выводу этой обмотки, который соответствует первой цифре, т. е. следующей более высокой декаде числа, выражающей отклонение нуля в приборе. Второй конец провода 20 подсоединить к другому выводу, взятому от конца первичной обмотки 15 так, чтобы число десятичных долей этой первичной обмотки соответствовало первой цифре числа, выражающей относительное положение подвижных объектов.
Такими включениями можно добиться, чтобы потенциал свободного конца соединительного провода 20 относительно Земли соответствовал бы алгебраической сумме отклонения нуля и относительного положения подвижных объектов. Таким образом, посредством этого компенсирующего напряжения можно сбалансировать напряжение, индуцируемое на электрод 11, положение которого соответствует смещению его от положения нуля на величину отклонения нуля плюс необходимое относительное положение подвижных объектов. Выполняется эта балансировка через трансформатор связи 23, выводы первичной обмотки 24 которого связаны с точками трансформатора 7, а средняя точка соединена с проводом связи 20.
Параллельно первичной обмотке 15 первого декадного трансформатора подключена вторичная обмотка 25 трансформатора связи 25.
За счет изменения соединений этого трансформатора связи с первичными обмотками трансформаторов 7 и 12 можно получить правильное компенсирующее напряжение при следующих условиях:
для положительного относительного перемещения подвижных устройств от их положения покоя;
для положительного или отрицательного перемещения подвижных устройств от смещенного положения покоя;
для отрицательного относительного перемещения подвижных устройств от их конечного положения, т. е. от положения максимального смещения.
Устройство может работать в качестве измерительного прибора или в качестве управляющего устройства.
В первом случае оператор устанавливает штыри декадного трансформатора на выводы этих трансформаторов, соответствующие требуемой цифре отклонения нуля, т. е. положению, от которого начнется перемещение подвижных объектов. Установка пололсения штырей декадного трансформатора при последовательных опытных подходах дает возможность оператору сбалансировать напряжение, создаваемое потенциометром /. По показаниям индикатора 3 можно определить балансное состояние. Амплитуда перемещения подвижных объектов выражается числом, полученным при считывании для каждой декады числа десятичных долей в соответствующей первичной обмотке декадных трансформаторов 12, 13, 14.
Соединение каждого трансформатора 12, 13, 14 с нулем и установка щтырей осуществляются селекторными переключателями, имеющими десять положений. При сопряжении контактов селекторных переключений и соответствующем подключении их к индикатору в автоматически управляется этот индикатор, который показывает относительное перемещение подвижных устройств, когда произведена балансировка.
В случае использования устройства в качестве управляющего прибора подстройка отклонения нуля выполняется так же, как описано выше, но после того, как достигнута установка положения штырей, блок управления автоматически перемещает подвижные устройства в требуемое положение, соответствующее выбранному компенсирующему напряжению. Блок управления состоит из компаратора, сравнивающего выходное напряжение датчика с компенсирующим напряжением, и двигателя, вызывающего неремещение подвижных устройств относительно друг друга до тех пор, пока выходной сигнал с компаратора не станет равным нулю.
Предмет изобретения
40
1.Устройство для регистрации относительного перемещения двух подвижных объектов, содержащее датчик перемещений, например
емкостный потенциометр, электроды которого, укрепленные на одном из подвижных объектов, соединены выводами вторичной обмотки питающего трансформатора, подключенного к генератору переменного напряжения, а электрод, укрепленный на втором подвижном объекте, подключен к усилителю с индикатором, отличающееся тем, что, с целью повышения точности регистрации при работе устройства в области звуковых частот, оно содержит
компенсирующий генератор переменного напряжения, синхронизируемый по фазе с питающим генератором, причем один из зажимов компенсирующего генератора заземлен, а второй подключен к нулевым выводам питающего трансформатора.
2.Устройство по п. 1, отличающееся тем, что в нем компенсирующий генератор переменного напряжения содержит последовательно включенные согласующий и декадные Бичными обмотками, выводы которых соединены с контактами селекторного переключателя установки нуля и переключателя положения, причем первичная обмотка согласующего трансформатора подключена к отводам 5 вторичной обмотки питающего трансформатора, а отвод от первичной обмотки согласующего трансформатора соединен с одним из выводов вторичной обмотки первого декадного трансформатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ТРЕХФАЗНЫХ ИЗМЕРИТЕЛЬНЫХ ТРАНСФОРМАТОРОВ НАПРЯЖЕНИЯ | 2004 |
|
RU2277249C1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ИЗМЕРИТЕЛЬНЫХ ТРАНСФОРМАТОРОВ НАПРЯЖЕНИЯ | 2005 |
|
RU2282206C1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ИЗМЕРИТЕЛЬНЫХ ТРАНСФОРМАТОРОВ НАПРЯЖЕНИЯ | 2003 |
|
RU2274871C2 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ ДУГОВОЙ ЭЛЕКТРОСВАРКИ НА ПОСТОЯННОМ ТОКЕ | 1992 |
|
RU2049612C1 |
| Преобразователь угла поворота вала в напряжение | 1978 |
|
SU750536A1 |
| Устройство для защиты от анормальных режимов трехфазного асинхронного электродвигателя,питаемого от источника | 1976 |
|
SU619992A1 |
| Устройство для токовой защиты | 1975 |
|
SU667175A3 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
| Устройство для подгонки проволочных резисторов | 1980 |
|
SU918982A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АКТИВНОЙ МОЩНОСТИ СИНУСОИДАЛЬНОГО ТОКА В ЭЛЕКТРИЧЕСКОЙ ЦЕПИ С КОМПЛЕКСНЫМ СОПРОТИВЛЕНИЕМ | 1991 |
|
RU2028625C1 |