Изобретение относится к устройствам для уборки зерновых культур на высоком срезе и предназначено для использования в сельском хозяйстве.
Широко известна жатка-хедер, получившая название от слова head - голова, …, колос (Вейс Ю.А. Курс сельскохозяйственного машиноведения. - М. - Л. - Сельколхозгиз, 1931. - С.302-304). Она содержит остов с укрепленным на его переднем крае режущим аппаратом. Над режущим аппаратом находится мотовило. Высота расположения остова жатки над почвой определяет высоту среза и длину остающейся стерни. Сзади режущего аппарата находится поперечный транспортер.
При движении жатки по полю мотовило, вращаясь, подталкивает растения к режущему аппарату, удерживает их при скашивании и отправляет их на поперечный транспортер.
Недостатком жатки-хедера является то, что она не имеет устройств, способных поднимать колосья пониклых и полеглых растений, предотвращать падение срезанных колосьев перед режущим аппаратом на почву. По этой причине применение хедеров по прямому назначению, то есть для скашивания зерновых на высоте 400-600 мм, приводило к большим потерям урожая.
Для подъема пониклых и полеглых растений на высоту более 200-250 мм применяются жатки, оснащенные пассивными и активными стеблеподъемными устройствами.
Широко известна жатка кукурузоуборочного комбайна, оснащенная активным стеблеподъемником (Основы проектирования и расчет сельскохозяйственных машин // Учебники и учеб. пособия для техникумов [Текст]. / Л.А.Резников, В.Т.Ещенко, Г.Н.Дьяченко, Н.А.Сокол; ред. М.Н.Прилепина. - М.: Агропромиздат, 1991. - С.416). Она содержит режущий аппарат и стеблеподъемник, состоящий из корпусов, внутри которых находятся бесконечные гибкие тяговые органы, выполненные в виде цепей. Цепные контуры огибают ведущие звездочки, соединенные с общим валом с помощью угловых редукторов, и ведомые звездочки, размещенные на концах корпусов, образуя рабочие и холостые ветви. Все цепные контуры лежат в одной поперечно-наклонной плоскости. На цепях равномерно размещены пальцы, которые выполнены неподвижными относительно звеньев цепей и направлены вдоль плоскости цепных контуров. Цепные контуры размещены в корпусах так, что пальцы рабочих ветвей выступают из корпусов вправо или влево.
Это устройство работает следующим образом. Жатка движется по полю вперед, а общий вал через угловые редукторы сообщает вращение ведущим звездочкам. Те заставляют перемещаться рабочие ветви цепей назад и вверх, а холостые ветви - вперед и вниз. При движении вокруг ведомой звездочки пальцы рабочих ветвей выходят за пределы корпуса и заключают стебли в пространство между собой. Так как сама жатка движется вперед, а корпуса наклонены вниз, вектор абсолютной скорости пальцев направлен преимущественно вверх. Благодаря этому происходит подъем полеглых и пониклых растений. На прямостоящие растения пальцы почти не оказывают воздействия, а только поддерживают их вертикальное положение. Выпрямленные и прямостоящие растения скашиваются режущим аппаратом. На ведущей звездочке пальцы поворачиваются в обратном направлении и вновь оказываются внутри корпусов. Стебли, лишившиеся поддержки пальцев, по инерции выпадают из пространства между корпусами и направляются к последующим рабочим органам. Благодаря подъему колосьев пониклых и полеглых растений появляется возможность значительно увеличить высоту среза и при этом сохранить минимальный уровень потерь колосьев.
Недостатком такого устройства является то, что корпуса имеют большую ширину. Это приемлемо для уборки кукурузы, между стеблями которой имеют широкие междурядья. При уборке зерновых культур сплошного посева, таких как пшеница, большая ширина корпусов вызовет увеличение поперечного отгиба стеблей убираемых растений, что приведет к большой неравномерности высоты среза и, как следствие, повышению потерь. Кроме того, устройство имеет угловые редукторы, что усложняет и удорожает конструкцию жатки.
Наиболее близкой по технической сущности и достигаемому результату является жатка (авт. свид. СССР №226332), имеющая остов, на котором укреплены режущий аппарат и стеблеподъемник для подъема и подвода стеблей к режущему аппарату, содержащий ряд корпусов, внутри которых размещены бесконечные гибкие тяговые органы, выполненные в виде троса, и направляющие, установленные по контуру тяговых органов. Замкнутые контуры бесконечных гибких тяговых органов расположены в продольно-вертикальных плоскостях параллельно друг другу. Тросы надеты на ведущие шкивы, расположенные на общем валу, и на ведомые шкивы, расположенные на концах корпусов, образуя рабочие и холостые ветви. На тросах равномерно с помощью шарниров закреплены Г-образные пальцы, то есть пальцы выполнены подвижными (имеющими одну степень свободы) относительно бесконечных гибких тяговых органов, коими являются тросы. Благодаря шарнирному закреплению Г-образные пальцы имеют возможность поворачиваться относительно оси троса так, что пальцы рабочей ветви троса выступают из корпусов вправо и (или) влево, а пальцы холостой ветви троса расположены внутри корпусов.
Процесс работы прототипа происходит следующим образом. Жатка движется по полю вперед, а общий вал сообщает вращение ведущим шкивам. Те заставляют перемещаться рабочие ветви тросов назад и вверх, а холостые ветви - вперед и вниз. Пальцы при движении вокруг ведомых шкивов, благодаря взаимодействию пальцев с направляющими особой формы, поворачиваются относительно тросов в одну из боковых сторон. При этом они выходят за пределы корпусов вправо и (или) влево. Благодаря этому они внедряются в стеблестой. Выйдя на рабочую ветвь, пальцы заключают стебли в пространство между собой и корпусами. Так как сама жатка движется вперед, а корпуса наклонены вниз, вектор абсолютной скорости пальцев направлен преимущественно вверх. Благодаря этому происходит подъем полеглых и пониклых растений. На прямостоящие растения пальцы почти не оказывают воздействия, а только поддерживают их вертикальное положение. Выпрямленные и прямостоящие растения скашиваются режущим аппаратом. При приближении к звездочке общего вала, благодаря изменению формы направляющих, пальцы поворачиваются в обратном направлении, вновь оказываются внутри корпусов, занимая положение, близкое к вертикальному. Стебли, лишившиеся поддержки пальцев, по инерции выпадают из пространства между корпусами и направляются к последующим рабочим органам.
Наличие общего вала стеблеподъемника очень упрощает конструкцию привода бесконечных тяговых органов.
Однако шарнирное крепление пальцев к бесконечному тяговому органу, в частности к тросу, требует наличия подшипников в местах крепления пальцев на тросах, хотя бы подшипников скольжения, а также наличия в корпусах направляющих сложной и точной формы. Режущий аппарат должен регулироваться по высоте, что требует применения отдельных устройств. Чтобы во время работы такого устройства высокие стебли убираемых растений не могли сгруживаться перед общим валом, необходимо расположить его над максимально высокими стеблями. Это приводит к увеличенным габаритам стеблеподъемного устройства. Таким образом, жатка прототипа имеет весьма сложную, массивную и габаритную конструкцию, содержащую большое количество подвижных частей, которые движутся по сложной траектории и поэтому подвергаются большим знакопеременным инерционным нагрузкам. Изготовление такой жатки требует применения высококачественных материалов и комплектующих, применения точного оборудования при изготовлении, квалифицированного использования, в том числе тщательного технического ухода при ее эксплуатации. В результате жатка имеет высокую стоимость, повышенную энергоемкость и требует больше затрат при эксплуатации.
Задача изобретения состоит в упрощении, удешевлении конструкции жатки-колосоуборки, снижении потерь урожая и энергетических затрат путем значительного сокращения габаритов и массы ее составных частей, количества подвижных элементов, особенно таких, что движутся по сложной траектории и поэтому подвергаются большим знакопеременным инерционным нагрузкам.
Задача решена тем, что заявленная жатка-колосоуборка, как ее прототип, содержит остов, на котором укреплены режущий аппарат и стеблеподъемник, включающий общий вал с ведущими шкивами, роликами или звездочками, ряд корпусов с ведомыми шкивами, роликами или звездочками, бесконечные гибкие тяговые органы, которые надеты на ведущие и ведомые шкивы, ролики или звездочки, образуя холостые и рабочие ветви, эти бесконечные гибкие тяговые органы имеют неподвижно закрепленные и равномерно размещенные на них пальцы, причем пальцы рабочих ветвей выступают из корпусов вправо и влево, а пальцы холостых ветвей находятся внутри корпусов.
Однако, в отличие от прототипа, режущий аппарат установлен перед общим валом стеблеподъемника, поперечное сечение корпусов выполнено таким образом, что в местах расположения холостых ветвей бесконечных гибких тяговых органов его ширина превышает ширину бесконечных гибких тяговых органов, включая размер пальцев, а в местах расположения рабочих ветвей бесконечных гибких тяговых органов ширина поперечного сечения корпусов меньше ширины бесконечных гибких тяговых органов, включающей размер пальцев.
В результате расположения режущего аппарата перед общим валом прочесывание стеблей происходит лишь до высоты среза, то есть приблизительно до одной трети высоты стеблестоя. В итоге размеры стеблеподъемника значительно сокращаются. Такое исполнение стеблеподъемника уменьшает металлоемкость жатки, позволяет упростить ее копирующие устройства жатки и снижает потери урожая. Уменьшается и степень воздействия рабочих органов на убираемые растения, что понижает энергоемкость процесса уборки. Результатом выполнения поперечного сечения корпусов разной ширины в местах расположения рабочих и холостых ветвей бесконечных гибких тяговых органов является то, что их холостые ветви движутся вперед в закрытом пространстве внутри корпусов, и поэтому пальцы не могут воздействовать на стебли убираемых растений, а пальцы рабочих ветвей открыты с боковых сторон корпусов и могут зацеплять стебли, увлекать за собой, выпрямляя те из них, что поникли или полегли. Попадание стеблей в межпальцевое пространство происходит не так, как в прототипе. Не пальцы проникают в пространство, занимаемое стеблями, а стебли сами попадают в пространство между пальцами рабочих ветвей благодаря своей упругости и связности, то есть перепутанности друг с другом и своими листьями. Все это обеспечивает достижение технического результата.
Кроме того, стеблеподъемник содержит поперечную балку незамкнутого профиля, на которой укреплены корпуса, общий вал и режущий аппарат, а также шарниры, с помощью которых стеблеподъемник соединен с остовом.
Наличие поперечной балки позволяет стеблеподъемнику самостоятельно копировать рельеф почвы, поворачиваясь на неровностях вокруг шарниров относительно остова жатки-колосоуборки, а сам остов жестко закрепить на шасси уборочного агрегата, с возможностью изменения высоты его расположения над поверхностью почвы лишь при регулировке средней величины высоты среза. Незамкнутый поперечный профиль балки позволяет ей упруго скручиваться, когда отдельные корпуса преодолевают неровности поля. Это обеспечивает достижение дополнительного технического результата.
Кроме того, между корпусами могут быть размещены пассивные зубья, прикрепленные также к поперечной балке.
Такое решение позволяет увеличить вероятность захвата стеблей пальцами рабочих ветвей цепей. Это уменьшает потери урожая при уборке изреженных, мало связных посевов зерновых культур.
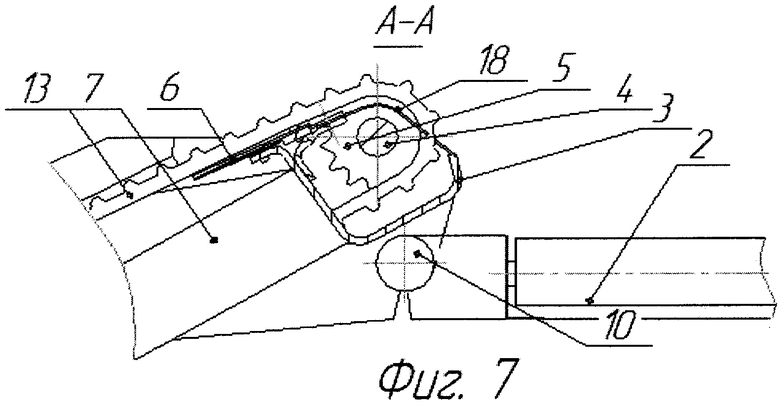
Кроме того, режущий аппарат может быть размещен либо над рабочими ветвями цепей, что обеспечивает наибольшую простоту конструкции стеблеподъемного устройства, либо под рабочими ветвями цепей, что обеспечивает наилучшие условия для работы режущего аппарата и повышает технологическую надежность его работы.
Суть изобретения поясняется чертежами.
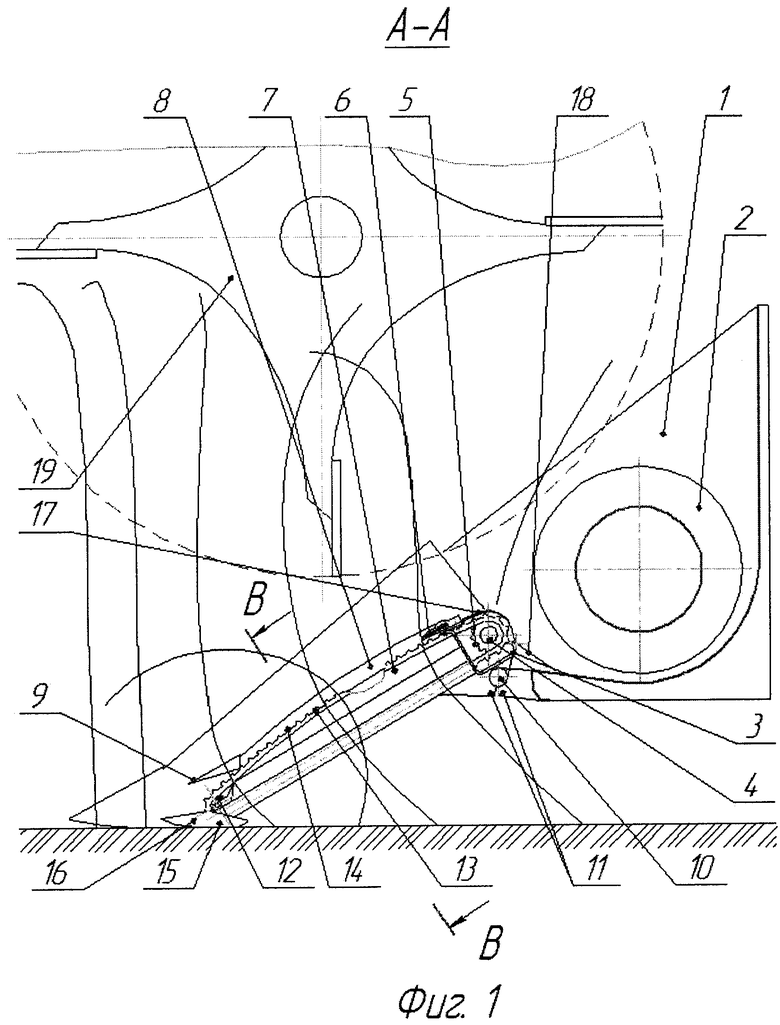
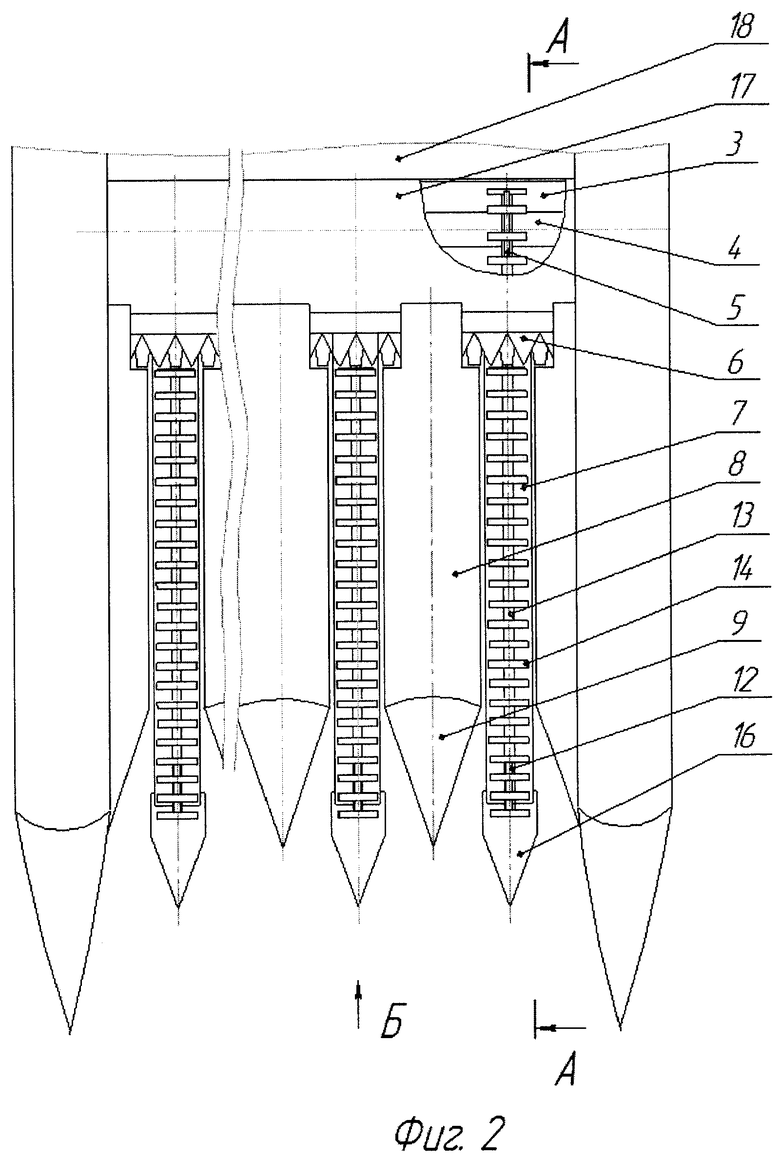
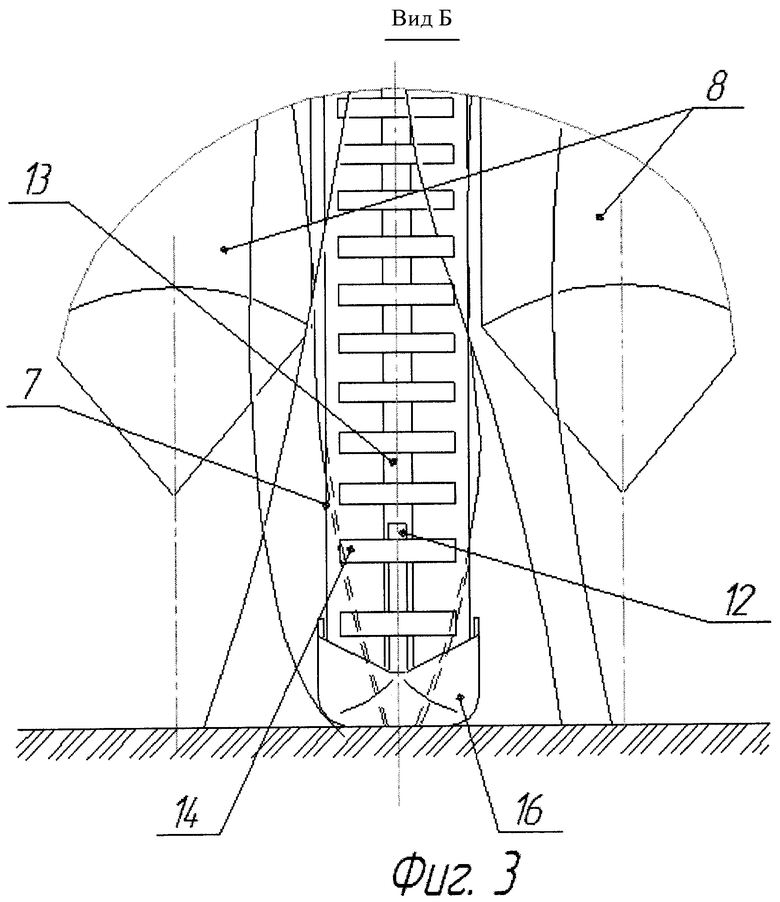
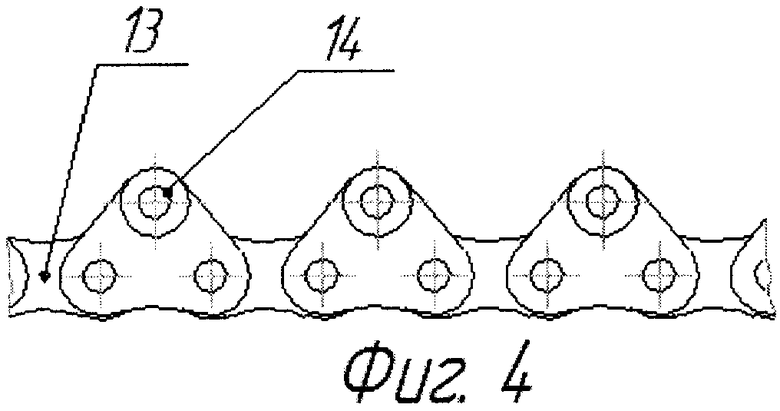
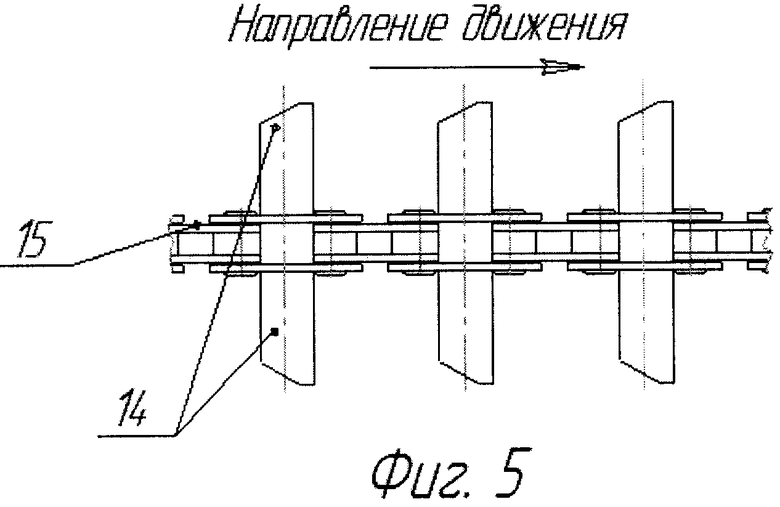
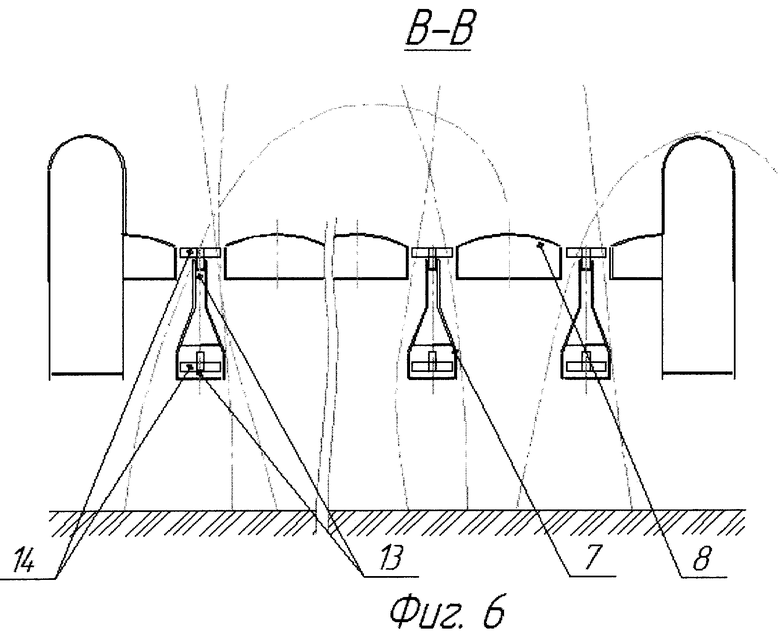
На фиг.1 показан продольный разрез жатки-колосоуборки по сечению А-А, изображенному на фиг.2; на фиг.2 показан вид на стеблеподъемное устройство сверху; на фиг.3 показан вид на стеблеподъемное устройство спереди, по виду Б, изображенному на фиг.2; на фиг.4 показана боковая проекция примера исполнения цепи с пальцами; на фиг.5 показана горизонтальная проекция цепи с пальцами; на фиг.6 показан поперечный разрез по сечению В-В, изображенный на фиг.1; на фиг.7 приведен вариант исполнения режущего аппарата под рабочими ветвями цепей.
Жатка-колосоуборка содержит остов 1, поперечный транспортер 2, стеблеподъемное устройство, состоящее из поперечной балки 3 незамкнутого профиля, на которой размещены общий вал 4 с ведущими звездочками 5, режущий аппарат 6, корпуса 7 и пассивные зубья 8 с делителями 9. Общий вал 4 может быть выполнен составным, а его части соединены между собой с помощью муфт, которые на чертежах не показаны. Поперечная балка 3 незамкнутого профиля крепится к остову 1 жатки с помощью шарниров 10. Под шарнирами 10 имеются ограничители 11, лимитирующие поворот стеблеподъемного устройства относительно остова 1. Это необходимо для предотвращения избыточного угла наклона стеблеподъемного устройства при работе без копирования рельефа поля, то есть на большой высоте среза, когда оно не касается почвы, а также для предотвращения избыточного скручивания поперечной балки 3 при копировании рельефа поля. Корпуса 7 имеют поперечный профиль переменного сечения. Широкая нижняя часть поперечного сечения выполнена в виде коробки. Узкая верхняя часть заканчивается дугообразной опорной дорожкой для цепи 13. На переднем конце каждого корпуса 7 крепится ведомая звездочка 12, являющаяся еще и натяжной. На ведущие звездочки 5 и ведомые звездочки 12 надеты цепи 13. Они выполняют роль бесконечных гибких тяговых органов. Поскольку цепи 13 огибают общий вал 4 с ведущими звездочками 5, их замкнутые контуры расположены параллельно друг другу. Цепи 13 имеют равномерно расположенные на них пальцы 14, которые выполнены неподвижными относительно звеньев цепей 13 и направлены перпендикулярно плоскостям цепных контуров, то есть вправо и влево, в стороны пассивных зубьев 8. Верхние рабочие ветви цепей 13 лежат на опорных дорожках корпусов 7, служащих успокоителями рабочих ветвей, а нижние находятся в натянутом состоянии внутри нижних частей корпусов 7. Ширина нижних частей корпусов 7 больше ширины цепи 13, включая размер пальцев 14, на величину гарантированного зазора, который исключает трение пальцев 14 о внутренние стенки корпуса 7. Под ведомой звездочкой 12 на конце корпуса 7 при помощи оси 15 закреплен башмак 16. Поперечная балка 3 и общий вал 4 с ведущими звездочками 5 закрыты кожухом 17. Сзади к балке 3 шарнирно крепится фартук 18, закрывающий просвет между ней и остовом 1. Кроме остова 1, поперечного транспортера 2 и стеблеподъемного устройства жатка-колосоуборка оснащена мотовилом 19.
Жатка-колосоуборка работает следующим образом. При движении жатки по полю благодаря шарнирам 10 стеблеподъемное устройство, опираясь башмаками 16 на почву, раздвигает растения перед своими корпусами 7. Благодаря скручиваемости поперечной балки 3 и осям 15 каждый башмак 16 корпусов 7 копирует микрорельеф поля, и его носок всегда находится на минимальном расстоянии от почвы. Стебли отгибаются вперед и вбок, а затем, скользя по поверхности башмаков 16, приподнимаются, если были наклонены. Благодаря незначительному поперечному размеру башмаков 16 суммарная величина поперечного отгиба невелика, как невелика доля стеблей, подвергающихся их воздействию. Скользя далее, стебли, обладая упругостью, стремясь вернуться в первоначальное положение, попадают к пальцам 14. Оказавшись в межпальцевом пространстве, стебли подхватываются и влекутся вверх и назад к режущему аппарату 6. При этом отдельные стебли находятся на некотором удалении от пальцев 14. Однако благодаря тому, что стебли имеют разный наклон и пересекаются друг с другом, а их листья переплетены между собой, они тоже подвергаются воздействию движущихся пальцев 14. Благодаря наклонному расположению корпусов 7 вертикальная составляющая вектора абсолютной скорости пальцев 14 направлена преимущественно вверх. В результате полеглые и пониклые растения поднимаются и выпрямляются. Направление горизонтальной составляющей абсолютной скорости пальцев 14 зависит от соотношения скоростей цепей 13 и рабочей скорости жатки-колосоуборки. При малой скорости жатки-колосоуборки горизонтальная проекция абсолютной скорости пальцев направлена назад. При увеличении рабочей скорости жатки-колосоуборки направление горизонтальной составляющей абсолютной скорости пальцев становится направленной вперед. При этом все растения несколько отклоняются вперед. Степень отклонения или, как его еще называют, продольного отгиба регулируется путем изменения частоты вращения общего вала 4. Это изменение осуществляется оператором уборочного агрегата или особым устройством, автоматически поддерживающим заданный продольный отгиб. Поддержание заданной величины продольного отгиба важно потому, что при постоянной высоте расположения рамы жатки над поверхностью почвы оно обеспечивает дополнительную регулировку длины оставляемой стерни, то есть определяет фактическую высоту среза.
Растения, достигнув режущего аппарата 6, перерезаются им, и они по инерции, а также с помощью мотовила 19, по кожуху 17 и фартуку 18 попадают в поперечный транспортер 2, который перемещает их к последующим рабочим органам уборочного агрегата, в состав которого входит предлагаемая жатка-колосоуборка. Изменение высоты расположения остова над поверхностью поля производится оператором уборочного агрегата. Оно осуществляется на ходу, исходя из высоты убираемых культурных растений. При достаточной высоте растений и отсутствии полеглости, что встречается чаще всего, остов 1 должен быть поднят на высоту, при которой башмаки 16 едва касаются поверхности почвы, поскольку ограничители 11 не дают корпусам 7 опуститься ниже. При таком режиме работы, который будет основным по времени, придавливание комлей растений к почве башмаками 16 отсутствует, что сводит поперечный отгиб стеблей и энергоемкость процесса работы жатки к минимуму. Мотовило 19 в этом случае выдвигается вперед, чтобы лучше содействовать вхождению стеблей в зазоры между корпусами 7 и пассивными зубьями 8.
В варианте, приведенном на фиг.7, режущий аппарат размещен под ведущими ветвями цепей.
Жатка-колосоуборка может быть выполнена иным образом. Корпуса, активные зубья и приводной вал могут быть установлены так же, как в прототипе, то есть непосредственно на остове жатки. Режущий аппарат устанавливается перед приводным валом над или под ведущими ветвями цепей. В этом случае для изменения высоты среза весь остов жатки-колосоуборки со стеблеподъемником и прочими узлами и механизмами, находящимися на нем, поворачивается относительно уборочного агрегата, с которым он соединен шарнирно с помощью механизма уравновешивания веса жатки. Повороты остова вверх и вниз происходят не только при регулировании высоты среза оператором, но и при копировании неровностей поля. При таком исполнении подвижная масса увеличивается. Это требует применения более мощных, сложных уравновешивающих механизмов. Отсюда следует, что такое исполнение изобретения уменьшает технический эффект.
Таким образом, предлагаемое в описании исполнение жатки-колосоуборки является более рациональным решением, обеспечивающим наивысший технический эффект и достижение поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕБЛЕПОДЪЕМНИК ДЛЯ ПОДЪЕМА И ПОДВОДА СТЕБЛЕЙ К РЕЖУЩЕМУ АППАРАТУ | 1992 |
|
RU2015644C1 |
| АКТИВНЫЙ САМООЧИЩАЮЩИЙСЯ СТЕБЛЕПОДЪЕМНИК | 2003 |
|
RU2259034C1 |
| Зернобобовая жатка | 1982 |
|
SU1113031A1 |
| АКТИВНЫЙ СТЕБЛЕПОДЪЕМНИК | 2003 |
|
RU2262830C2 |
| ПРИСПОСОБЛЕНИЕ К ЖАТКЕ ДЛЯ ПОДЪЕМА И ПОДВОДА ПОЛЕГЛЫХ СТЕБЛЕЙ К РЕЖУЩЕМУ АППАРАТУ | 1996 |
|
RU2112352C1 |
| Стеблеподьемник | 1974 |
|
SU501708A2 |
| СПОСОБ УБОРКИ ПОЛЕГЛЫХ СТЕБЕЛЬЧАТЫХ КУЛЬТУР И ЖАТКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2057427C1 |
| Жатка | 1959 |
|
SU967368A1 |
| Шарнирно-телескопический стеблеподъемник жатки | 1991 |
|
SU1787361A1 |
| Комбайн для уборки высокостебельных лубяных культур | 1988 |
|
SU1535440A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано при уборке зерновых культур при высоком срезе. Жатка-колосоуборка содержит остов, на котором укреплены стеблеподъемник и режущий аппарат. Стеблеподъемник включает общий вал с ведущими шкивами, роликами или звездочками и ряд корпусов, имеющих поперечное сечение переменной ширины, с ведомыми шкивами, роликами или звездочками. На ведущие и ведомые шкивы, ролики или звездочки надеты бесконечные гибкие тяговые органы, образуя холостые и рабочие ветви. Бесконечные гибкие тяговые органы имеют равномерно размещенные на них и закрепленные неподвижно пальцы. Пальцы рабочих ветвей выступают из корпусов вправо и влево, а пальцы холостых ветвей находятся внутри корпусов. Режущий аппарат установлен перед общим валом стеблеподъемника. Жатка-колосоуборка обеспечивает снижение потерь урожая и энергетических затрат. 4 з.п. ф-лы, 7 ил.
1. Жатка-колосоуборка, содержащая остов, на котором укреплены режущий аппарат и стеблеподъемник, включающий общий вал с ведущими шкивами, роликами или звездочками, ряд корпусов с ведомыми шкивами, роликами или звездочками, бесконечные гибкие тяговые органы, которые надеты на ведущие и ведомые шкивы, ролики или звездочки, образуя холостые и рабочие ветви, эти бесконечные гибкие тяговые органы имеют неподвижно закрепленные и равномерно размещенные на них пальцы, причем пальцы рабочих ветвей выступают из корпусов вправо и влево, а пальцы холостых ветвей находятся внутри корпусов, отличающаяся тем, что режущий аппарат установлен перед общим валом стеблеподъемника, поперечное сечение корпусов выполнено таким образом, что в местах расположения холостых ветвей бесконечных гибких тяговых органов его ширина превышает ширину бесконечных гибких тяговых органов, включая размер пальцев, а в местах расположения рабочих ветвей бесконечных гибких тяговых органов ширина поперечного сечения корпусов меньше ширины бесконечных гибких тяговых органов, включающей размер пальцев.
2. Жатка по п.1, отличающаяся тем, что стеблеподъемник содержит поперечную балку незамкнутого профиля, на которой укреплены корпуса, общий вал и режущий аппарат, а также шарниры, с помощью которых стеблеподъемник соединен с остовом.
3. Жатка по п.1 или 2, отличающаяся тем, что между корпусами размещены пассивные зубья, прикрепленные к поперечной балке.
4. Жатка по п.1 или 2, отличающаяся тем, что режущий аппарат размещен под рабочими ветвями цепей.
5. Жатка по п.1 или 2, отличающаяся тем, что режущий аппарат размещен над рабочими ветвями цепей.
| SU 226332 А1, 06.01.1969 | |||
| СТЕБЛЕПОДЪЕМНИК ДЛЯ ПОДЪЕМА И ПОДВОДА СТЕБЛЕЙ К РЕЖУЩЕМУ АППАРАТУ | 1992 |
|
RU2015644C1 |
| Устройство для подъема и подвода полеглых стеблей к режущему аппарату | 1981 |
|
SU1060137A1 |
| Чугун | 1974 |
|
SU501108A1 |
| US 3527035 А, 08.09.1970 | |||
| БУРОВОЕ ДОЛОТО | 2008 |
|
RU2361057C1 |

