Известные функциональные преобразователи, содержащие чувствительный к изменению магнитного поля элемент, например датчик Холла, и измерительный элемент, не обеспечивают решения квадратных уравнений, извлечения квадратного корня из отношения двух электрических сигналов.
Предлагаемый преобразователь, с целью расширения его метрологических воз-можностей, снабжен полюсными вставками с поворотным устройством, образуюш,ими магнитное поле, в которое помещен чувствительный элемент, вынесенный за пределы подвижной системы измерительного элемента, выполненного в виде магнитоэлектрического логомера, и соединенный с противодействующей рамкой последнего.
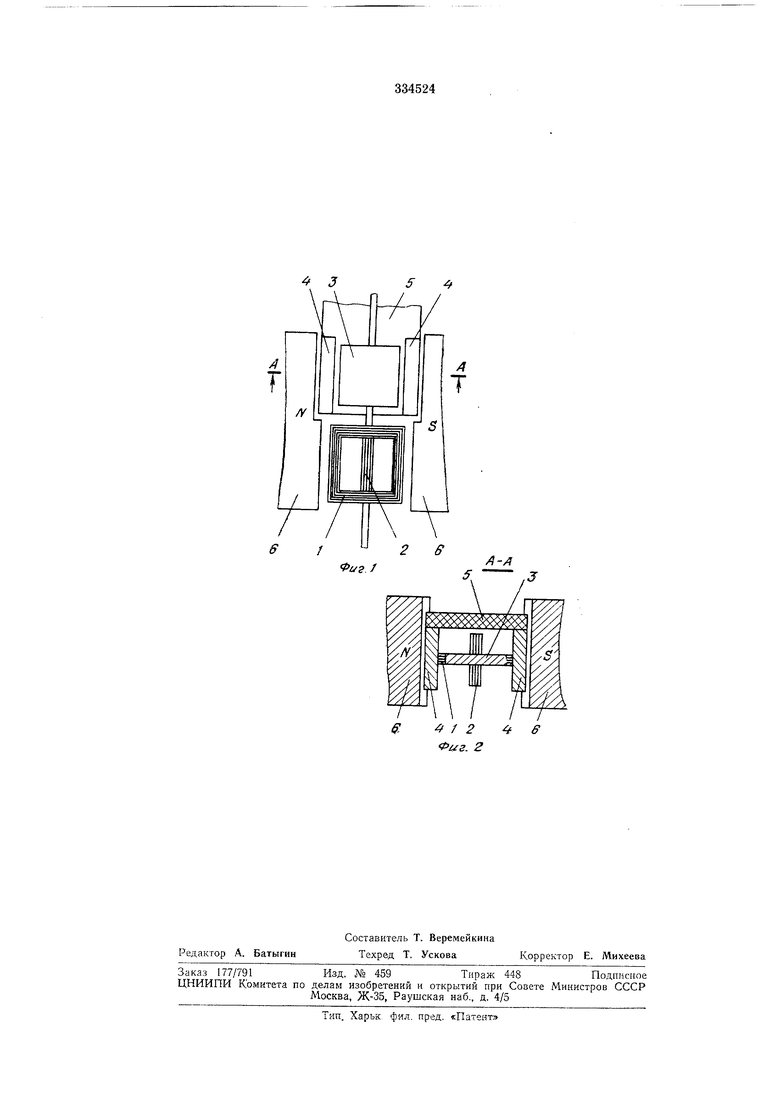
На фиг. 1 схематично изображен предлагаемый преобразователь (вид спереди); на фиг. 2 - вид преобразователя в плане и сечении по А-А. Подвижная система содержит вращающуюся / и противодействующую 2 рамки и датчик Холла 3. Датчик 3 вынесен за пределы рамок, скреплен с подвижной системой и помещен в магнитное поле, образованное полюсными вставками 4. Указанные вставки скреплены между собой промежуточной немагнитной деталью 5, являющейся элементом поворотного устройства (на чертеже не показано).
Подвижную систему охватывают полюсные наконечники 6 постоянного магнита (H;I чертеже не показан). Подвижная система снабжена корректором нуля (на чертеже не показан). Полюсные наконечники 6 (см. фиг. 1) имеют ступенчатый продольный профиль. Датчик 3 (см. фиг. 2) расположен вдоль поля параллельно плоскости вращающейся рамки 1, я противодействующая рамка 2 расположена перпендикулярно нолю.
Если на вращающуюся рамку подать сигнал /р, на противодействующую - /пр, а на вход противодействующей рамки, - /т.. то в стационарном режиме уравнение подвижной части можно записать:
Wa - /р6, /npi.ja 4- Л/т -Ь {.,а(1)
где W - противодействующий момент растяжек;
1 и V2 - потокосцепление вращающейся и противодействующей рамок;
соответственно /С - постояпная, зависящая от свойств датчика.
Минимальное значение /пр можно выбрать так, чтобы /пр 2 было значительно больше IF. В этом случае уравнение (1) можно записать:
уравнением относительно а, следовательно, зеркальный выход нреобразователя, определяемый откло-нением светового нятна на экране осциллографа, пронорционален корню этого уравнения. Если в уравнении (2) отсутствует сигнал, подаваемый в противодействующую раМ:Ку, /„р 0, тогда
/{/ri,.a2 /pii f
V/ fi /I / iiL (4) ., /т
я
т. е. отклонение подвижной части пропорционально корню квадратному из отношения двух сигналов. Если один из сигналов будет величиной постоянной, то таким преобразователем можно зарегистрировать либо корень квадратный из поданного электрического сигнала, .чибо корень квадратный из обратной величины сигнала соответственно. При этом электрический сигнал, снимаемый из соединения выхода датчика и входа противодействующей рамки, пропорционален отклонению подвижной системы и является электрическим выходом преобразователя. Если выход рамки не заведен на вход про гдаодействующей рамки, а на все три входа преобразователя поданы сигналы /р, /пр и /т соответственно, на выходе датчика появляется сигна«1, пропорциональный отношению произведения двух токов к третьему;
/Р-/Т
пр
Обратная связь с выхода датчика может быть также заведена на вход вращающейся рамки; тогда уравнение движения нодвижной части примет вид:
Га - /рф, - ± /С/тфа.
В случае, если W C/npilJ- ± , отклонение подвижной части пропорционально отклонению одного сигнала к алгебраической сумме двух других:
/п
/пр .-Л/Т
Настройка такого преобразователя усложняется, так как требуется установить также противодействующую рамку в нулевое положение. Совмещение механического (когда момент, создаваемый растяжкой, равен нулю) и
(3) электрического (когда плоскость противодействующей рамки параллельна вектору напряженности магнитного поля) нулей противодействуюи ей рамки осуществляется с помощью корректора поворота системы.
Однако при этом плоскость датчика может расположиться под некоторым углом к полю. Для совмещения плоскости датчика с вектором напряженности магнитного поля, датчик помещен между полюсными вставками, которые скреплены между собой и связаны с дополнительным поворотным устройством, обеспечивающим нужную ориентацию поля по отнощению к датчику.
В итоге, с помощью корректора и поворотного устройства дополнительных полюсных
вставок, между которыми расположен датчик, обеспечивается совмещение нулей системы. При необходимости сохранения магнитной индукции во всем рабочем зазоре постоянной, полюсные наконечники могут быть
выполнены со стуненчатым профилем.
Предмет изобретения
Функциональный преобразователь, содержащий чувствительный к изменению магнитного поля элемент, например датчик Холла, и измерительный элемент, отличающийся тем, что, с целью расщирения метрологических возможностей преобразователя, он снабжен полюсными вставками с поворотным устройством, образующими ;магнитпое поле, в которое помещен ч вствительный элемент, вынесенный за пределы подвижной системы измерительного элемента, выполненного в виде магнитоэлектрического логометра, и соедипенный с противодействующей рамкой последнего.
4 J
5 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Светолучевой осциллограф | 1972 |
|
SU439760A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРИБОР | 1967 |
|
SU205136A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2003 |
|
RU2242011C2 |
| РЕГУЛИРУЕМЫЙ ГЕНЕРАТОР МАГНИТНОГО ПОЛЯ НА ОСНОВЕ СТРУКТУР ХАЛЬБАХА | 2008 |
|
RU2466491C2 |
| Магнитоэлектрический регистрирующий измерительный прибор | 1961 |
|
SU143135A1 |
| ЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1970 |
|
SU285092A1 |
| Устройство для измерения скольжения асинхронного двигателя | 1982 |
|
SU1035524A1 |
| Электромагнитный прибор с поляризующим подмагничиванием | 1982 |
|
SU1791783A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ГАЛЬВАНОМЕТР-.-Пп.;-' г- ;.:-^;ГПТ?10 4^UilA U.iWiis-i ёМЙ- ПРЕОБРАЗОВАТЕЛЬ | 1967 |
|
SU433406A1 |
| Преобразователь перемещений | 1988 |
|
SU1587321A1 |