Устройство относится к системам автоматического контроля и регулирования.
Известны преобразователи угол-фаза, содержащие статор и ротор с расположенными на них обмотками и фазосдвигающие элементы.
Описываемый преобразователь отличается тем, что в нем статор и ротор выполнены в виде четырех пакетов магнитолровода, на которых .расположено ino одной обмотке с числом пар полюсов, равным п (где п - произвольное число). Оси полюсов обмоток, расположенных на первом и третьем, втором и четвертом пакетах, развернуты между собой на угол 90/п°, а оси полюсов обмоток, расположенных на первом и втором пакетах, развернуты между собой на 90/2ra°, причем обмотка возбуждения выполнена из параллельно соединенных обмоток, расположенных на первом и втором пакетах, а выходная обмотка--из последовательно соединенных обмоток, расположенных на третьем и четвертом пакетах.
Такое выполнение устройства позволяет увелнЧить масштяб преобразования, повысить стабильность и точность работы.
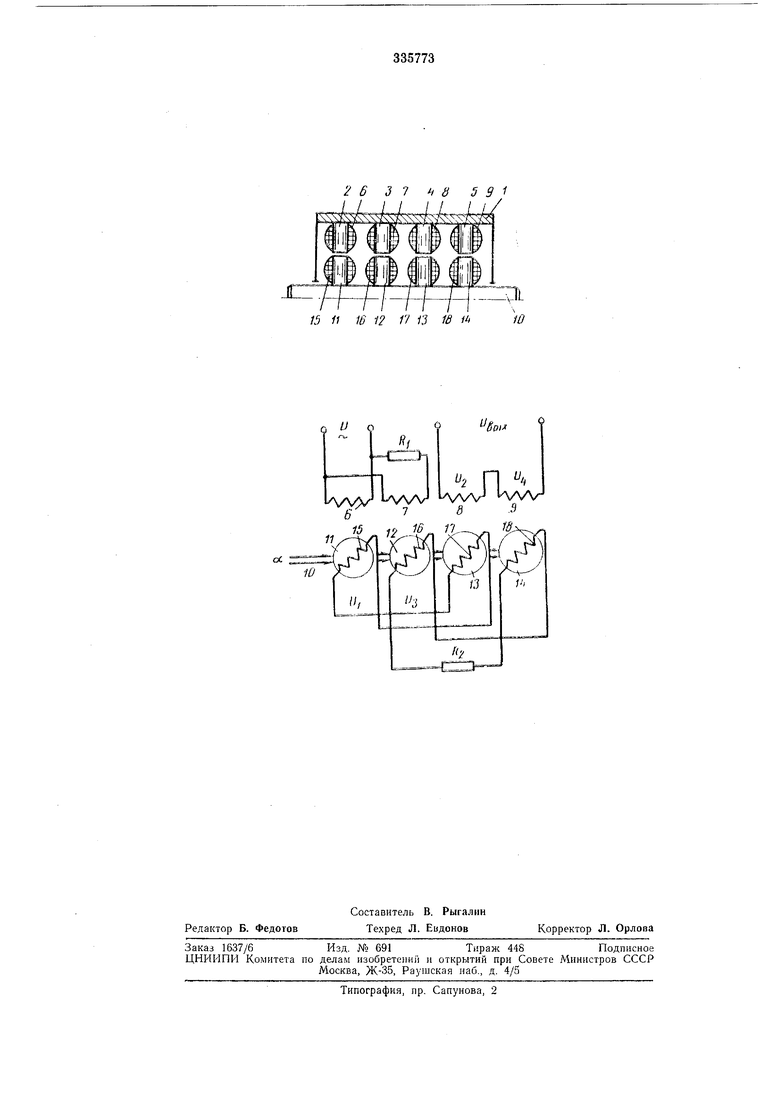
На чертеже схематически изображены преобразователь угол-фаза и соединения его обмоток.
нитопровода статора, несущие на себе по одной обмотке 6-9 с п. парами полюсов; на поворотном валу ротора 10 установлены четыре пакета магннтопровода ротора, несущие на себе по одной обмотке 15-18 с п парами полюсов.
Пакеты .одного элемента (напри.мер ротора) расположены так, что оси полюсов всех обмоток находятся в одних и тех же диаметральных плоскостях. Пакеты другого элемента (например статора) расположены так, что диаметральные плоскости, проходящие через оси полюсов обмоток 2 к 4, 3 и 5 пакетов, сме90
щены на .
При этом обмотка 6 подключена непосредственно к источнику питания преобразователя угол-фаза, а обмотка 7 - через последовательно с ней включенное |фазосдвигающее сопротивление RI. Таким образом, цепи возбуждения преобразователя составляют две статорные обмоткн б и 7 и активное сопротивление /.
Роторные обмотки преобразователя соединены только между собой, взаимно неподвижны и поэтому не нуждаются в токоподводящих устройствах.
следовательно включенное активное фазосдзигающее сопротивление 2 - с обмоткой 18.
Выходная обмотка преобразователя состоит из .последовательно включенных стагоряых обмоток 8 и 9.
При подаче напряжения U на входные зажимы преобразователя на обмотке ротора 15, в зависимости от положения вала ротора, характеризуемого углом поворота а, наводится напрялсение
f/i L sin /i а,
где п - число пар лолюсов.
Это напряжение, подалное на обмотку ротора 17, наводит в статорной обмотке 8 напряжение f/2 f/i cos « а, так как пакет статора 4 развернут относительно пакета стато90°
ра 2 на -. Лосле
подстановк выражения
для U можно получить выражение для U в виде
и,и sin п о( cos п а - и sin 2« «.
При подведении питания на обмотку статора 7 через активное сопротивление i на обмотке ротора 16 наводится напряжение бз, сдвинутое по фазе относительно, напряжения и, на некоторый угол,, зависящий от величины RI. Если величина R такова, что может сдвинуть фазу на 45°, напряжение на обмотке 16 изменяется по закону
(L+/).sin«( /2V2/2
так как пакет магнитопровода 3 сдвинут от„ 90носительно пакета магнитопровода 2 на --.
Напряжение f/., поданное на обмотку ротора 18 через последовательно включенное активное сопротивление, подобранное для осуществления дополнительного фазового сдвига на 45°, наводит «а обмотке статора 9 напряжение
.J. 90
а
cos я
2п Г2
так как пакет магнитопровода статора 5 сдвинут относительно пакета магнитопровода ста90°
тора 3 на -. Подставив выражение для Цз в
выражение для U, получим
„.„(.±А%,„„(.+|1 ;i/|sin2«(o. + |l
Таким образом, напряжения, наведенные на обмотках статора 8 и 9, пропорциональны
соответственно синусу и косинусу 2п а, и сдвинуты между собой по фазе на 90°.
Изменив обмоточные данные, можно создать равные коэффициенты юропорциональности в выражениях для напряжений U и U. Тогда выходное напряжение преобразователя примет вид
(sin 2п. а-f / cos 2/г ее).
Отсюда следует, что амплитуда выходного напряжения при изменении угла а не изменяется
вых| const,
а фаза этого напряжения
Ф -- arctg arctg tg(90 - 2no.)l sin 2/ я
Ф 90 -2na.
Таким образом угол сдвига фазы меняется пропорционально углу ф с увеличением масштаба в 2п раз.
При рассмотрении работы преобразователя угол-фаза предполагалось, что каждое из фазосдвигающих сопротивлений i и R сдвигает фазу напряжения в цепи, где они включены, на 45. В общем случае они могут давать разные сдвиги фазы при условии, что их суммарное действие сдвигает фазу напряжения на обмотке 9 относительно/ фазы напряжения на обмотке 8 на 90 В данном устройстве вместо использования сопротивлений RI и можно выполнять обмотки 16, 17 и 7 константановым или смешанным (часть медным, часть константановым) проводом, подобрав фазовые сдвиги.
Предмет изобретения
Преобразователь угол-фаза, содержащий статор и ротор с расположеиными на них обмотками и фазосдвигающие элементы, отличающпйся тем, что, с целью увеличения масштаба преобразования и повышения стабильности работы, статор и ротор выполнены в виде четырех пакетов магнитопровода, на которых расположено noi одной обмотке, обмотки, расиоложенные на первом и втором пакетах, развернуты между собой на 90/2/г° (где п 1, 2, 3,...), а обмотки, расположенные на первом и третьем, втором и четвертом пакетах, развернуты между собой на 90/п°, причем обмотки,
расположенные на первом и втором иакетах, соединены параллельно и подключены к источнику переменного тока, а обмотки, расположенные на третьем и четвертом иакетах, соединены последовательно и подключены к
выходным зажимам преобразователя.
26 37 ч д 591
/ 
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯ | 1973 |
|
SU393582A1 |
| ФАЗОВРАЩАТЕЛЬ | 1973 |
|
SU397853A1 |
| Преобразователь "угол-фаза | 1978 |
|
SU752676A1 |
| Двухканальный бесконтактный датчик угловых перемещений | 1979 |
|
SU894347A1 |
| Бесконтактный вращающийся трансформатор | 1983 |
|
SU1171915A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПЕРЕМЕЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2005 |
|
RU2314625C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU377976A1 |
| ИВДУК1ЩОННЫЙ РВДУКТОСИН | 1974 |
|
SU445101A1 |
| Многополюсный вращающийся трансформатор | 1987 |
|
SU1432675A1 |
| Двухканальный бесконтактный датчик угловых перемещений | 1985 |
|
SU1310623A2 |
JZ:
h H-fFH
W fl 16 12 f 13 iS
.zza
0/h П
ЛАА КЛ/V
