(54) ДВУХКЛНАЛЬНЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК Изобретение относится к системам автоматического измерения, контроля и регулирования и может быть использовано для точных измерений угловых перемещений. Известны датчики углового перемещения , в состав которых входят кольцевые трансформаторы. Эти устройства представляют собой совокупность контактных датчиков и кольцевы трансформаторов, причем для каждой отдельно выводимой обмотки ротора контактного датчика предусмотрен отдельный кольцевой трансформатор l Недостатком такого типа устройств являются сравнительно большие габариты из-за наличия кольцевых трансформаторов . Известен также бесконтактный двухотсчетный преобразователь уголфаза , представляющий собой сочетание четырех плоских вращающихся трансформаторов (ВТ) в единой конструкции. Этот преобразователь имеет единую цепь возбуждения и две (двухполюсную и многополюсную) выходные обмотки 2. Недостатком этого преобразователя несмотря на сравнит-ельно высокую точ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ность, являются большие осевые габариты. Наиболее близким к изобретению ляется двухканальный бесконтактный датчик угловых перемещений, содержащий пакетные магнитопроводы ротора и статора и три группы квадратурных обмоток с числами пар полюсов п, m и п ±1, где пит- любые целые числа, из которых квадратурные обмотки с числсяи пар полюсов п, являющиеся, обмотками возбуждения, размещены на одном из пакетов магнитопроводов статора и ротора 3 . Недостатком данного датчика являются его относительно большие осевые габариты из-за наличия трех пар пакетов магнитопроводов статора и ротора, размещенных по осевой длине датчика. Цель изобретения - уменьшение габаритов датчика. Указанная цель достигается благодаря тому, что магнитопроводы ротора и статора выполнены двухпакетными, обмотки ротора и статора с числами пар полюсов тип ±1 размещены во втором из пакетов магнитопроводов ротора и статора соответственно, а числа m и п ±1 не имеют общих сомножителей.
На фиг. 1 представлен датчик обий вид, разрез; на фиг. 2 - схема оединения его обмоток.
В корпусе 1 двухканального датчи а размещены магнитопровод статора, содержащий пакеты 2 и 3 и магнитопровод ротора с пакетами 4 и 5.
На пакете 2 магнитопровода статора размегцены две входные квадратурные (сдвинутые на 90 эл.град) обмотки б и 7, являющиеся обмотками возбуждения обоих каналов.
Обмотки 6 и 7 имеют число пар полюсов п.
При однос азном питании одна из обмоток 6 или 7 возбуждения подключается к источнику питания, а вторая закорачивается, а при двухфазном (режим фазовращателя) обмотки подключаются к разным фазам источника питания (не показан).
На концентрично расположенном относительно пакета 2 магнитопровода статора пакете 4 магнитопровода ротора размещены две квадратурные обмотки 8 и 9, имеющие те же числа пар полюсов, равные п.
На втором пакете 5 магнитопровода ротора размещены две пары квадратурных обмоток 10 и 11, имеющих п+1 или п-1 числа пар полюсов, и обмоток 12 и 13, имеющих m пар полюсов.
Роторные обмотки 10 и 12 пакета 5 подключены к обмотке 8 пакета 4, а обмотки 11 и 13 - к обмотке 9.При этом взаимное подключение обмоток 10 и 12 к обмотке 8 выполнено в согласованной полярности, а обмоток 11 и 13 к обмотке 9 - в противоположной.
На пакете 3 магнитопровода статора размещены две пары выходных обмоток 1 4 и 15 и 16,17.
Взаимное подключение роторных обмоток 10 и 12 к обмотке 8 в согласованной полярности обеспечивает эффект, аналогичный увеличению числа пар полюсов пакета 3 магнитопровода статора (т + п), благодаря которому в выходных обмотках 16 и 17 статора наводятся напряжения пропорциональные sin (п + т) cos (п + т)-Ы, представляющие собой сигналы точного отсчета.
Подключение роторных обмоток 11 и 13, к обмотке 9 в противоположной псшярности соответствует уменьшению чксАа. пар полюсов п - (п ±1) ±1, благодаря чему в выходных обмотках 14 и 15 статора наводятся напряжения, пропорциональные sine/, и coso представляющие собой сигналы грубого отсчета (одна пара полюсов).
Датчик работает следующим образом.
При подаче напряжения питания. на одну из обмоток возбуждения,например 6, на роторных обмотках 8 и
9 будут наведены напряжения, пропорциональные соответственно s i п с и COS d где ni- угол поворота ротора, отсчитываемый от положения ротора, при котором взаимная индукция обмое ТОК 6 и 8 равна нулю.
Эти напряжения подаются, соответственно, на обмотки 10 и 12 и обмотки 11 и 13 второго пакета 5 ротора. Напряжение, поданное на обмотку 10,
наведет в выходных обмотках 14 и 15, соответственно, второго пакета 3
статора напряжения
)
Sih nDl-6in(ht1) м sinttot cos( Напряжение, поданное на обмотку 11, наведет в тех же выходных обмотках 14 и 15 статора.-соответственно, напряжения
0собПА-сс1в(Г(±1)АЫо и
- сое Ы-5 in (п fl U V о ,
где oto- угол, соответствующий положению ротора, при котором взаимная индукция обмоток 10 и 14 обра1чается в нуль.
Таким образом, суг/1марные выходные напряжения на обмотках 14 и 15 второго пакета 3 статора, соответственно, равны
inhdl-6iM((o tcosndi-cos(vitiU4,AojCOS(to/tolo
sinl1d-coi( -cosЫ i г(hi:-lMt o
siKtc(toto
Следовательно, обмотки 14 и 15 являются выходными квадратурными обмотками канала грубого отсчета. I
Напряжение, поданное на обмотку 12, наведет в выходных обмотках 16 и 17 статора, соответственно,напряжения
S-inna-eivi (vyidl+dlo)n sin Ho(-C06(.-oioP
Напряжение, поданное на обмотку 13, наведет в тех же выходных обмотках 16 и 17, соответственно,напряжения
- Cos Kiel СО6 ( Wto(+01 о ) М COSHot-Sfw (vno( 4о(о),
55 где dip - угол, соответствующий положению ротора, при котором взаимная индукция обмоток 12 м 16 обращается в нуль.
Таким образом, суммарные выходные напряжения на обмотках 16 и 17
будут, соответственно, равны
SlMvid(-6in(K«ol-Mo)- 6lhho(-coe(W(+c/o) +
-С05Ы-СОб()- Ы.-61И (V)J.tcAo):
i5 (Xo) -Sin (w-t-w W-i-olo
Cлteдoвaтeлы o, обмотки 16 и 17 являются выходными квадратурными обмотками канала точного отсчета.
Если при расчете обмоток 10 и 12 принять одинаковое начало отсчета УГЛОВ, то угол будет равен углу olf) . Если нули взаимной индукции обмоток 10 и 14 и обмоток 12 и 1& совместить по положению ротора, то с/-.
cio ОБлагодаря некратности чисел пар полюсов п i: 1 и m обмоток статора и ротора, размещенных на общей магнитной цепи, в данном датчике принципиально отсутствует взаимодействие между разнополюсными обмотками.
Возможные паразитные взаимодействия, обусловленные технологическим погрешностями, могут быть устранены в датчике известными средствами.
Таким образом, выполнение магнитопроводов ротора и статора двухпакетным с совместным размещением роторных и статорных обмоток на одном из пакетов магнитопровода ротора и статора, соответственно, позволяет существенно уменьшить осевые габариты датчика,
Оормула изобретения Двухканальный бесконтактный датчик угловых перемещений, содержащий
пакетные магнитопровод ротора и статора и три группы квадратурных обмоток с числами пар полюсов п, ni и nil , где пит- любые целые числа, из которых квадратурные обмотки с числом пар полюсов п, являющихся обмотками возбузадения, размещены на одном из пакетов магнитопроводов статора и ротора, отличающийся тем, что, с целью уменьшения габаритов,мар нитопроводьт ротора и статора выполoнены двухпакетными, обмотки ротора и статора с числами пар полюсов m и п ±1 размещены на втором из пакетов магнитопроводов ротора и статора/соответственно, а числа m и п ±1 не
5 имеют общих сомножителей.
Источники информации, принятые во внимание при экспертиз.е
0
I
1.Пульер Ю,М, Индукционные электромеханические элементы вычислительных и дистанционно-следящих систем, м,, Машиностроение, 1964,
с, 139,
5
2,АвтЪрское свидетельство СССР № 393582, кл, G 01 О 5/20, 1970,
3,. Авторское свидетельство СССР № 366345, кл, G 01 В 7/00, 1970,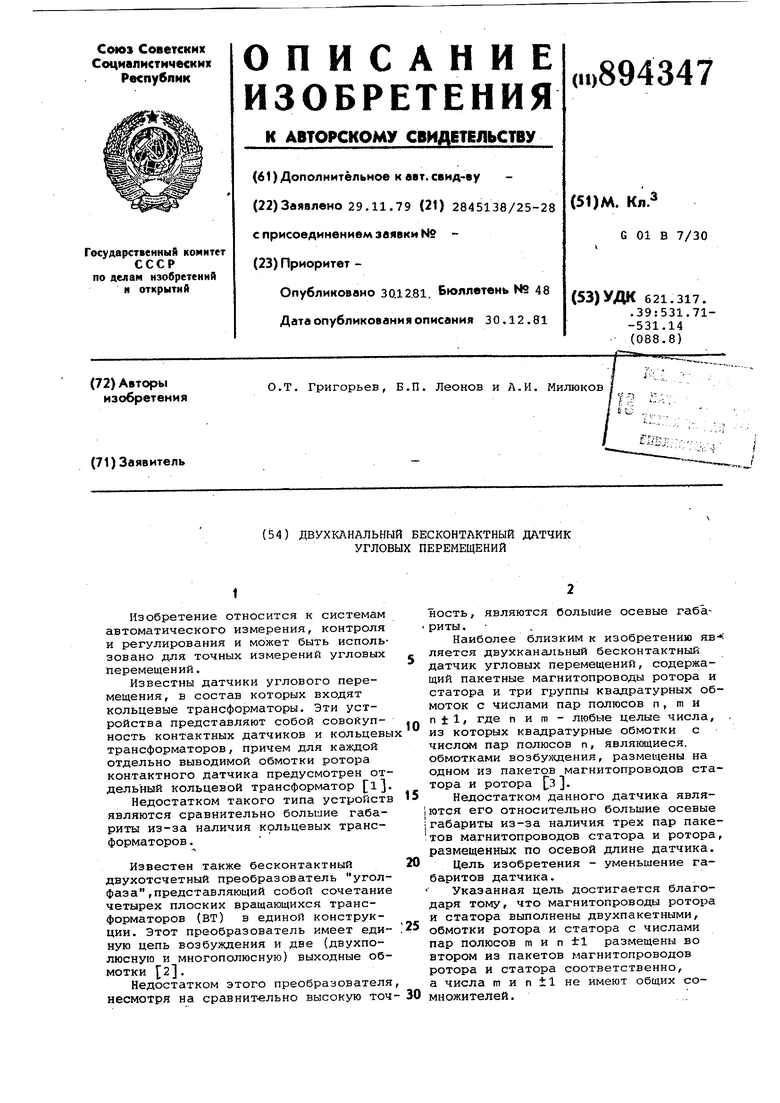

| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный вращающийся трансформатор | 1983 |
|
SU1171915A1 |
| Многополюсный вращающийся трансформатор | 1990 |
|
SU1737650A1 |
| Двухканальный бесконтактный датчик угловых перемещений | 1985 |
|
SU1310623A2 |
| Бесконтактный вращающийся трансформатор | 1980 |
|
SU936254A1 |
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1702492A1 |
| ФАЗОВРАЩАТЕЛЬ | 1973 |
|
SU397853A1 |
| Вращающийся трансформатор | 1989 |
|
SU1669057A1 |
| Двухотсчетный бесконтактный индукционный датчик угла | 1987 |
|
SU1566448A1 |
| Вращающийся трансформатор | 1989 |
|
SU1661924A1 |
| Вращающийся трансформатор | 1989 |
|
SU1669058A1 |

coso(
)
$Ln(n4m)
и
