Изобретение относится :к способам определения Положения и глубины залегания металлических подводных трубопроводов три их установке и эксплуатации.
Известный способ определения местоположения и глубины залегания труб под землей, заключающийся в измерении напряженности магнитного поля, создаваемого током, протекающим по трубопроводу, в двух точках, находящихся на вертикали над трубопроводом, неточен.
Предложенный способ отличается от известного тем, что измеряют сумму и разность напряженностей в двух точках, находящихся над трубопроводом, и по их отношению определяют глубину залегания трубопровода. Это дает возможность с более высокой точностью определить глубину залегания подводных трубопроводов.
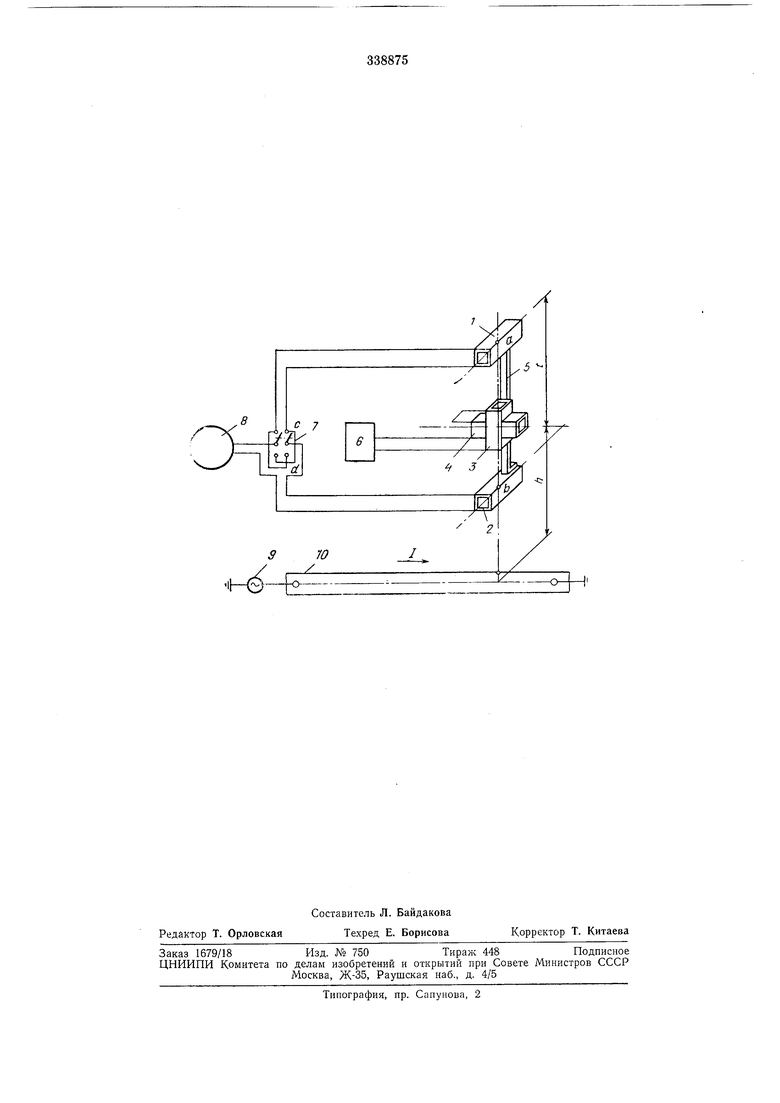
На чертеже изображена блок-схема устройства, реализующего предлагаемый способ.
Устройство содержит измерительные рамки J-4, стержень 5 из немагнитного материала, нуль-ортан 6, переключатель 7, милливольтметр 8, генератор переменного тока 9.
По трубопроводу 10 с помощью генератора 9 пропускают переменный ток /. Вокруг трубопр0 вода создается электромагнитное поле, напряженность которого Н{ в точке.
расположенной на расстоянии ft, от оси трубопровода, равна
(1)
2г.Л;
Для ТОГО, чтобы на величину электромагнитного поля не влияли токи, протекающие между заземлителям1И, последние отнесены от оси трубопровода на расстояние 15-20 м.
Если измерить сумму напряженностей поля в двух точках а и Ь, находящихся над трубопроводом, расстояние между которыми равно t,
Н, + Н, 4г+ .,,,.. (2)
2r.h
2я (h 4- О
а затем разность напрял ениостей в этих точках
r jrj
(3)
«
2т. (h + f)
/ir.fl
то, найдя отнощение т суммы напряженностей к их разности, получим однозначную зависимость между т и расстоянием h от центра трубопровода до точки Ь: Нц -г //6 , , 2ft
(4)
1 +
т .
h (m-l).
-В выражении (5) связь между hum линейная, что говорит о возможности измерения глубины в широком диапазоне, так как чувствительность при изменении k остается постоянной.
Напряженность электромагнитного поля можно измерять с ломощыо магнитомодуляциоиных датчиков, датчиков Холла и индукционных преобразователей (измерительных рамок). В описываемом устройстве используются измерительные рамки ка,к наиболее распространенные для измерения на низких частотах. Э. д. с. Ег, наведенная в рамке пбд действием напряженности Hi, определяется как
Ei 2nfWiiJiHiSi,
где / - частота переменного тока /;
Wi - число витков измерительной рамки; |j, - магнитная пронидаемость окружающей среды; Si - действующая площадь рамки.
|При измерении глубины залегания подводного трубопровода рамки 3 и 4 ориентируются таким образом, чтобы э.д.с. в рамках, измеряемые нуль-органом 6, были равны нулю. Это возможно только в том -случае, когда общий центр измерительных рамок 3 н 4 находится точно над осью трубопровода, а оси рамок ледеат в одной плоскости с осью трубопровода.
Затем определяют расстояние h от оси трубопровода до центра измерительной рамки 2. Переключатель 7 ставят в положение с, рамки / я 2 соединяют согласно-последовательно, и электронный милливольтметр 8 измеряет сумму э.д.с. измерительных рамок 1 и 2 (El и Е2 соответственно), пропорциональную сумме напряженностей в точках и и Ь.
Е, Е,+Е, 2T.fw,S.,,,S,. (7)
Переключатель 7 ставят в положение d, рамки 1 я 2 соединяют последовательновстречно. Электронный милливольтметр в этом случае измеряет разность э.д.с. Е и EI, пропорциональную разности напряженностей Яв и Яа.
Е Е,-Е, 2T.fw,S,i.H, ,S,,. (8)
Рамки 1 У1 2, расположенные на известном расстоянии друг от друга, выполняют таким образом, чтобы произведения и W2S2 были равны.
Если взять отнощение т этих двух отсчетов милливольтметра с и Ер
Дс . ЕЗ + EI Н/, + Нд 1 ( /ОЧ
Е„ ,-, Нн-Н t
то получим зависимость, аналогичную выражению (4).
Поворот рамок в горизонтальной плоскости и отклонение их от вертикального положения не вызовут погрешности:, так как пропорционально изменяется только действующие пло. щади рамок, а отнощение от -- остается
р неизменным.
Для определения глубины залегания трубопровода под дном реки одновременно замеряют глубину водоема, например, с помощью эхолота типа ИРЭЛ (или ПЭЛ). Зная глубину реки /ip в месте расположения трубопровода, находят глубину залегания А его под дном водоема
А /г-Лр,
если центр измерительной рамки 2 лежит в плоскости зеркала воды.
Описанный способ может быть использован также для измерения глубины залегания трубопроводов, имеющих резервную нить, при этом 3 измерения вносят поправку, учитывающую влияние параллельной нити трубопровода.
Предмет изобретения
Способ измерения глубины залегания металлических подводных трубопроводов, при которо-м определяют напряженность электромагнитного поля, создаваемого переменным током, протекающим по трубопроводу, в двух
точках, находящимся по вертикали над трубопроводом, отличающийся тем, что, с целью повышения точности, измеряют сумму и разность напряженностей электромагнитного поля в указанных тачках и до их отношению
определяют глубину залегания трубопровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ МЕТАЛЛИЧЕСКИХ ПОДВОДНЫХ ТРУБОПРОВОДОВ | 1971 |
|
SU318003A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛОЖЕНИЯ И ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА С ОСНОВНОЙ И РЕЗЕРВНОЙ НИТКАМИ | 1966 |
|
SU222824A1 |
| Способ определения тока в подземном токопроводе бесконтактным методом | 1987 |
|
SU1503020A1 |
| Устройство для определения глубины залегания металлических подводных трубопроводов | 1974 |
|
SU717687A1 |
| Способ определения расположения кабеля | 1974 |
|
SU526838A1 |
| Способ геоэлектроразведки | 1984 |
|
SU1328777A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ ЭЛЕКТРОПРОВОДНОГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ | 1998 |
|
RU2136020C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАСС ПРОКЛАДКИ ПОДВОДНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2386152C1 |
| Способ геоэлектроразведки | 1989 |
|
SU1829020A1 |
| Устройство для бесконтактного измерения токов в подземных магистральных трубопроводах | 1985 |
|
SU1308905A1 |