Изобретение относится к области электромагнитных исследований и может быть использовано преимущественно для поиска, обнаружения, распознавания и отслеживания трасс подводных протяженных металлосодержащих объектов, в том числе и заиленных в донный грунт, например, подводных трубопроводов, силовых кабелей и т.д.
Потребность в точных и экономически эффективных способах и средствах поиска, отслеживания и исследования подводных трубопроводов и кабелей стала в последние годы особенно острой и в первую очередь для контроля за экологическим состоянием морей и океанов.
Для осуществления такого контроля необходимо систематически проводить проверку технического состояния уже известных трасс подводных трубопроводов и кабелей, а также осуществлять поиск, обнаружение, определение технического состояния иных подводных трубопроводов и кабелей.
Известен способ электромагнитной геофизической разведки, заключающийся в зондировании среды электромагнитными импульсами конечной длительности и регистрации сигнала вторичного поля в паузе между импульсами. В данном способе перед началом измерений в базовой точке профиля зондирующий импульс устанавливают в виде осциллирующей, затухающей на интервале τ функции вида
где W(t) - весовая функция; Wэ - центральная частота осцилляции; t - текущее время.
Общую длительность импульса τ устанавливают равной времени группового запаздывания на участие излучатель - объект - приемник в зависимости от минимальной дальности до объекта поиска r и средней электропроводности окружающей среды σ в соответствии с формулой
tr = τ = 0,65•10-6•r2•σ.
Центральную частоту осцилляции Wэ устанавливают равной эффективной полосе частот ожидаемого энергетического отношения сигнал/помеха плюс шум на входе приемника. Далее изменяют соотношение амплитуд полукосинусоидальных импульсов в зондирующем сигнале и добиваются минимального отклика среды по показаниям приемника. Затем выполняют рабочие измерения вдоль профиля наблюдений, регистрируют амплитуду и время запаздывания вторичного сигнала, по которым судят о размерах объекта поиска и его дальности [1].
Таким образом, известный способ заключается в возбуждении окружающей среды, в том числе и объекта поиска, периодической последовательностью видеоимпульсных сигналов полусинусоидальной формы и регистрации вторичных сигналов, несущих информацию об объекте поиска.
Преимущественной областью применения известного способа электромагнитной геофизической разведки является геоэлектрическое картирование горизонтально-слоистых сред в морской воде и поиск рудых тел в горных выработках, т.е. в условиях, когда электромагнитные параметры среды вблизи излучающих и приемных датчиков мало изменяются при передвижении вдоль профиля наблюдения. Известный способ применим и для поиска электропроводящих тел в морской воде. Недостатком данного способа в этом случае применения является невозможность обнаружения и определения трассы прокладки электропроводного протяженного подводного объекта непосредственно во время движения подводной поисковой установки (с которой реализуется способ) под любым углом пересечения к продольной оси подводного объекта.
Известен также способ определения трасс прокладки подводных трубопроводов с борта подводной поисковой установки, состоящей в возбуждении электромагнитного поля дипольным источником излучения и измерении его в симметрично расположенных точках приемным диполем [2].
Известный способ определения трасс прокладки подводных трубопроводов позволяет определить трассу непосредственно во время движения подводной поисковой установки, с которой реализуется этот способ. Согласно известному способу в случае расположения трубопровода перпендикулярно к направлению движения подводной поисковой установки максимумы ЭДС в каждой из приемных рамок появляются одновременно, т. е. сдвиг между ними будет равен нулю. В случае, когда во время движения подводной поисковой установки одна из рамок проходит над трубопроводом первой, то в этом случае сдвиг между ними не будет равен нулю. Зная расстояние между приемными рамками, по величине и направлению сдвига максимумов аномального сигнала в приемных рамках определяют величину и знак угла между направлением прокладки подводного трубопровода и прямой, соединяющей приемные рамки. Преимуществом известного способа является отсутствие необходимости, во-первых, в остановках подводной поисковой установки для выполнения измерений, а во-вторых, в изменении во время ориентации приемных рамок во время определения трассы прокладки подводного трубопровода.
Известный способ определения трассы прокладки подводного трубопровода эффективен, если минимальное расстояние между приемными рамками и трубопроводом не превышает 10-12 метров, а угол между осью трубопровода и прямой, проходящей через центры приемных рамок, лежит в пределах ± 75o.
Данный способ определения трассы прокладки подводного трубопровода по функциональному назначению, по своей технической сущности и по достигаемому техническому результату наиболее близок к заявленному способу.
Недостатками известного способа являются невозможность обнаружения электропроводного протяженного подводного объекта во время движения подводной поисковой установки под любым курсовым углом относительно трассы прокладки подводного объекта, так как в известном способе в зоне углов от ± 75o и до ± 90o существенно теряется чувствительность и становится практически невозможным обнаружение подводного объекта и измерение его ориентации, т.е. определение трассы прокладки трубопровода; невозможность непрерывного отслеживания трассы прокладки электропроводного протяженного подводного объекта при движении подводной поисковой установки вдоль трассы.
В основу изобретения поставлена задача разработать такой способ обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки, который позволил бы обнаружить подводный объект во время движения подводной поисковой установки под любым курсовым углом относительно трассы прокладки подводного объекта и непрерывно отслеживать трассу прокладки последнего при движении подводной поисковой установки вдоль трассы подводного объекта. Кроме того, заявленный способ должен в максимально возможной степени удовлетворять требованиям реализации его с борта такой специфической подводной поисковой установки, как высокоманевренный, глубоководный автономный необитаемый подводный аппарат (далее подводный аппарат).
Поставленная задача достигается тем, что в способе обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки, включающем возбуждение электромагнитного поля дипольным источником излучения и измерение его в симметрично расположенных точках приемным диполем, в качестве подводной поисковой установки используют автономный необитаемый подводный аппарат, точки излучения и измерения электромагнитного поля располагают по бортам вдоль подводного аппарата непосредственно на его внешней формообразующей поверхности, возбуждение электромагнитного поля осуществляют дипольным источником излучения последовательно по меньшей мере по трем направлениям, первоначально вдоль продольной оси подводного аппарата по направлению его движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, с одновременным изменением частоты тока во время возбуждения по каждому направлению излучения, измерение вторичного электромагнитного поля выполняют по меньшей мере в четырех точках подводного аппарата и по величине напряжений в них судят о наличии электропроводного протяженного подводного объекта, фиксируют его ориентацию в горизонтальной плоскости относительно системы излучающего и приемного диполей, а по угловому и боковому смещениям подводного аппарата относительно трассы прокладки протяженного подводного объекта выполняют отслеживание последнего.
Для возбуждения электромагнитного поля и его измерения используют электрические диполи.
Измерение вторичного электромагнитного поля выполняют на фоне возбужденного электромагнитного поля. Рабочие электроды диполей выполняют в виде листов металла и устанавливают заподлицо на внешнюю поверхность корпуса подводного аппарата, образуемую токонепроводящим материалом.
В заявленном способе обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки общими существенными признаками для него и для его прототипа являются возбуждение электромагнитного поля дипольным источником излучения; измерение электромагнитного поля в симметрично расположенных точках приемным диполем.
Сопоставительный анализ существенных признаков заявленного способа обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки и прототипа показывает, что первый, в отличие от прототипа, имеет следующие существенные отличительные признаки: в качестве подводной поисковой установки используют автономный необитаемый подводный аппарат; точки излучения и измерения электромагнитного поля располагают по бортам вдоль подводного аппарата непосредственно на его внешней формообразующей поверхности; возбуждение электромагнитного поля осуществляют дипольным источником излучения последовательно по меньшей мере по трем направлениям, первоначально вдоль продольной оси подводного аппарата по направлению его движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, с одновременным изменением частоты тока во время возбуждения по каждому направлению излучения; измерение вторичного электромагнитного поля выполняют по меньшей мере в четырех точках подводного аппарата и по величине напряжений в них судят о наличии протяженного подводного объекта и фиксируют его ориентацию в горизонтальной плоскости относительно излучающего и приемного диполей; по измеренным угловому и боковому смещениям подводного аппарата относительно трассы прокладки протяженного подводного объекта выполняют отслеживание последнего.
Данная совокупность известных и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Признаки же, указанные ниже, характеризуют изобретение лишь в конкретных формах реализации отличительных существенных признаков способа, но также существенным образом обеспечивают достижение технического результата: для возбуждения электромагнитного поля и его измерения используют электрические диполи; измерение вторичного электромагнитного поля выполняют на фоне возбужденного электромагнитного поля; рабочие электроды диполей выполняют в виде листов металла и устанавливают заподлицо на внешнюю поверхность корпуса подводного аппарата, образуемую токонепроводящим материалом.
Именно такая совокупность всех существенных признаков позволила разработать способ обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки, который позволил, используя автономный необитаемый подводный аппарат в качестве подводной поисковой установки, обнаруживать электропроводный протяженный подводный объект во время движения подводного аппарата на глубинах до 6000 метров включительно под любым курсовым углом относительно трассы прокладки подводного объекта, а также точно фиксировать его ориентацию в горизонтальной плоскости относительно излучающего и приемного диполей и выполнять непрерывное отслеживание подводного объекта вдоль трассы прокладки. Такой технический результат достигнут заявленным способом обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки в силу того, что он позволил получить по меньшей мере три взаимодополняющих сигнала, позволяющих с высокой достоверностью определить угловое отклонение подводного аппарата от протяженного подводного объекта; выработать сигнал, величина которого позволила четко определять факт прохождения подводного аппарата над протяженным подводным объектом независимо от угла пересечения последнего подводным аппаратом; при движении подводного аппарата вдоль трассы подводного объекта непрерывно определять угловое и боковое смещения подводного объекта и по этим данным точно удерживать подводный аппарат над подводным объектом и вести отслеживание последнего.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е., благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т. е. оно явным образом не следует из уровня техники и пригодно для промышленного применения.
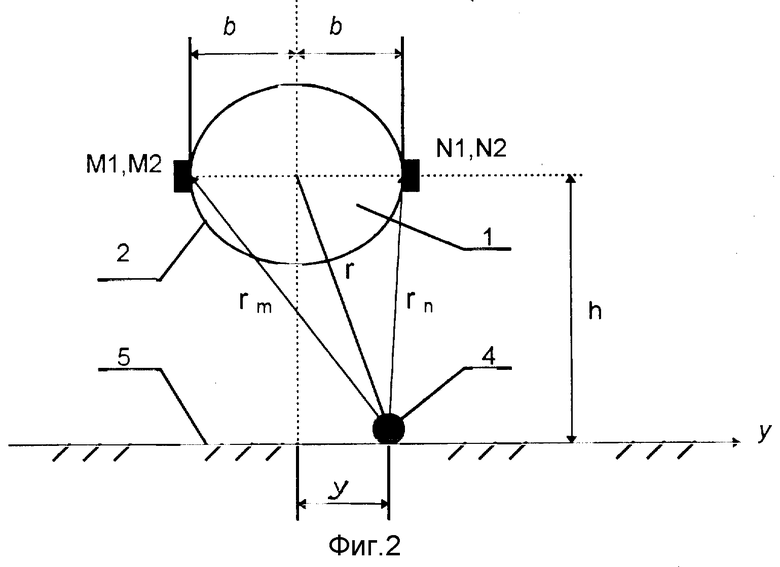
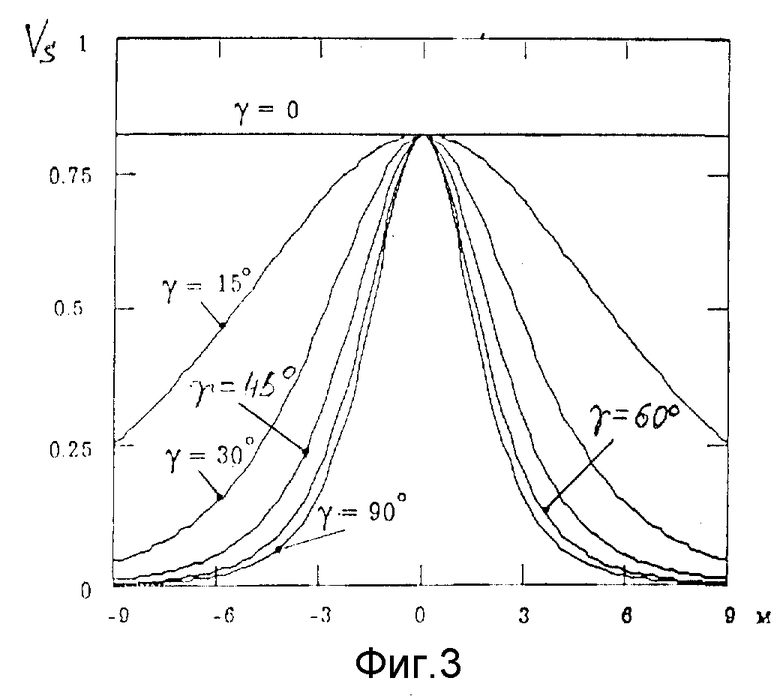
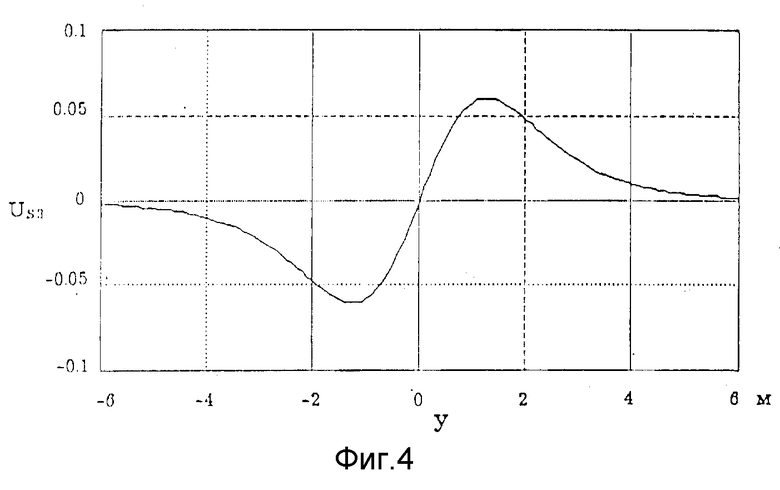
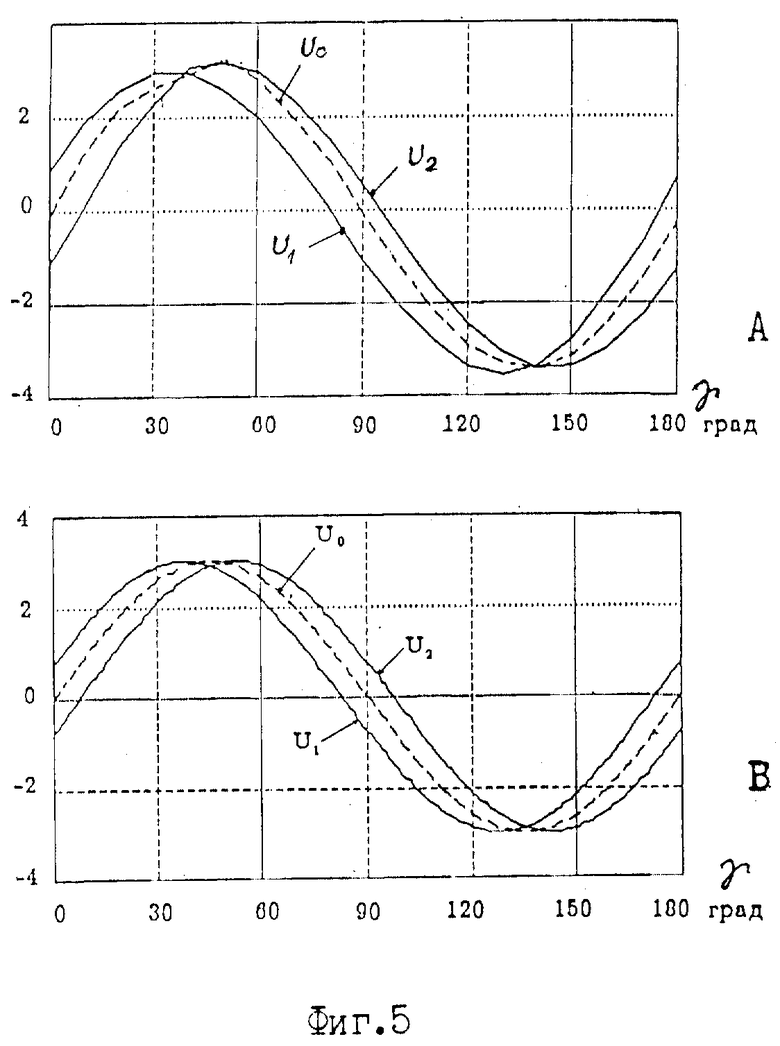
Сущность заявленного способа обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки поясняется чертежом, где на фиг.1 показана схема размещения на подводном аппарате точек, в которых устанавливают рабочие электроды возбуждающих и приемных диполей (вид сверху); на фиг. 2 - схема измерения бокового смещения подводного аппарата относительно электропроводного протяженного подводного объекта (вид с кормы); на фиг.3 - характер сигнала Vs, по которому судят о наличии электропроводного протяженного подводного объекта при пересечении последнего подводным аппаратом под разными углами γ (высота аппарата над дном h = 3 м, S - путь вдоль траектории движения аппарата), масштаб по ординате - условный; на фиг. 4 - характер сигнала Us3, между приемными электродами при отклонении y подводного аппарата в поперечном направлении от оси электропроводного протяженного подводного объекта (высота аппарата над дном h = 3 м), масштаб по ординате - условный; на фиг.5 - характер изменения сигналов U0, U1, U2 в зависимости от угла γ при расположении подводного аппарата над электропроводным протяженным подводным объектом: а) - нормированные данные модельного эксперимента; b) - расчетные данные. Масштаб по ординате - условный.
На чертеже и в описании изобретения приняты следующие обозначения: 1 - подводный аппарат; A1B1 и A2B2 - рабочие электроды возбуждающих диполей; M1N1 и M2N2 - рабочие электроды приемных диполей; γo - угол отклонения диполей относительно продольной и поперечной осей подводного аппарата; 2 - внешняя формообразующая поверхность (корпус) подводного аппарата; 3 - хвостовое оперение подводного аппарата; 4 - электропроводный протяженный подводный объект; 5 - дно моря (океана); γ - угол между продольной осью подводного аппарата, а также осью центрального возбуждающего диполя и продольной осью электропроводного протяженного подводного объекта.
Способ обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки осуществляется следующим образом.
В качестве подводной поисковой установки для реализации заявленного способа используют высокоманевренный глубоководный подводный аппарат 1. В прочные корпуса (на чертеже не показаны) подводного аппарата помещают аппаратуру, которая обеспечивает выполнение способа, и формируют на нем как минимум два возбуждающих диполя с рабочими электродами A1B1 и A2B2 и как минимум два приемных диполя с рабочими электродами M1N1 и M2N2, причем как возбуждающие, так и приемные диполи отклонены соответственно от продольной и поперечной осей подводного аппарата на угол γo. Рабочие электроды возбуждающих и приемных диполей располагают по бортам вдоль подводного аппарата в точках, находящихся непосредственно на его внешней формообразующей поверхности (см. фиг.1). Выполняют рабочие электроды из тонких листов металла и устанавливают заподлицо на внешней формообразующей поверхности 2 (корпусе) подводного аппарата, образуемой токонепроводящим материалом. Носовые рабочие электроды A1 и A2 выполняют в виде полуколец и устанавливают на носовой цилиндрической части корпуса 2 подводного аппарата, а кормовые рабочие электроды B1 и B2 соответственно закрепляют на кормовой части корпуса 2 подводного аппарата, например на его хвостовом оперении 3. Рабочие электроды M1N1 и M2N2 приемных диполей располагают на средней части корпуса 2 подводного аппарата симметрично его продольной и поперечной осям, причем в горизонтальной плоскости, проходящей через продольную ось аппарата. Параллельное соединение рабочих электродов, а именно A1 + A2, B1 + B2, M1 + M2 и N1 + N2 позволило сформировать на подводном аппарате дополнительно еще один возбуждающий диполь по продольной оси аппарата и еще один перпендикулярный ему приемный диполь по поперечной оси аппарата. Такое соединение рабочих электродов возбуждающих и приемных диполей позволило, делая соответствующие переключения, имитировать угловые колебания подводного аппарата с амплитудой γo и надежно обеспечить необходимые измерения, а следовательно, обнаружить электропроводный протяженный подводный объект 4 (далее подводный объект) под любым углом пересечения его подводным аппаратом. Для измерения высоты нахождения подводного аппарата над дном 5 на аппарате устанавливают эхолот (на чертеже не показан). Подготовленный таким образом к работе подводный аппарат опускают с судна-носителя в море. По соответствующей команде подводный аппарат следует своим ходом в заданный район поиска подводного объекта 4, стабилизируется на определенном расстоянии от дна 5 и по команде приступает к выполнению поиска подводного объекта, обнаружению последнего и отслеживанию его трассы прокладки.
С началом движения подводного аппарата в режиме поиска и обнаружения подводного объекта по команде переходят на поисковую программу заявленного способа. Согласно этой программе осуществляют возбуждение электромагнитного поля дипольным источником излучения последовательно по меньшей мере по трем направлениям, первоначально вдоль продольной оси подводного аппарата по направлению его движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, с одновременным изменением частоты тока во время возбуждения по каждому направлению излучения. Измерение вторичного электромагнитного поля выполняют по меньшей мере в четырех точках подводного аппарата и по величине напряжений (сигналов) в них судят о наличии подводного объекта, фиксируют его ориентацию в горизонтальной плоскости относительно излучающего и приемного диполей, а по измеренным угловому и боковому смещениям подводного аппарата относительно трассы прокладки подводного объекта выполняют управление аппаратом для отслеживания последнего. Для возбуждения электромагнитного поля и его измерения используют электрические диполи, а измерение вторичного электромагнитного поля выполняют на фоне возбужденного электромагнитного поля. Рабочие электроды диполей выполняют в виде листов металла и устанавливают заподлицо на внешнюю формообразующую поверхность подводного аппарата, образуемую токонепроводящим материалом.
Таким образом, заявленный способ реализуется циклически, а каждый цикл состоит по меньшей мере из трех шагов.
0-й шаг: возбуждение электромагнитного поля выполняют параллельно соединенными рабочими электродами A1 + A2, B1 + B2 вдоль продольной оси подводного аппарата по направлению его движения, а прием выполняют рабочими электродами M1 + M2, N1 + N2, образующими перпендикулярный диполь.
Общеизвестно, что силовые линии электрического поля, наведенного в протяженном подводном объекте, направлены вдоль подводного объекта. Исходя из этого разность потенциалов в этом шаге между электродами M1 + M2 и N1 + N2 определяют по формуле
где K1 - постоянный коэффициент, зависящий от конструктивных данных и свойств подводного объекта; K2 - постоянный коэффициент, характеризующий приемный диполь; I - ток в возбуждающем диполе A1 + A2, B1 + B2; r - расстояние от диполя до подводного объекта; γ - угол между осью возбуждающего диполя и продольной осью подводного объекта.
1-й шаг: возбуждение электромагнитного поля выполняют электродами A1, B1 в одну сторону от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, а прием выполняют электродами M1, N1. Разность потенциалов в этом шаге между приемными электродами M1, N1 определяют по формуле
2-й шаг: возбуждение электромагнитного поля выполняют электродами А2, В2 в другую сторону от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, а прием выполняют электродами М2, N2. Разность потенциалов в этом шаге между приемными электродами М2, N2 определяют по формуле
Используя переменные U1 и U2 формируют новые сигналы, учитывая при этом, что γo - конструктивная величина. Выполнив тригонометрические преобразования получим
Us1 = (U1+U2)/cos2γo = K1•K2•I•r-5•sin2γ, (4)
Us2 = (U1-U2)/sin2γo = K1•K2•I•r-5•cos2γ, (5)

После таких математических преобразований получен весьма характерный результирующий, резко выделяющийся на фоне возбужденного электромагнитного поля сигнал Vs, по которому судят о наличии подводного объекта и фиксируют его ориентацию в горизонтальной плоскости относительно излучающего и приемного диполей (см. фиг. 3).
Отслеживание подводного объекта осуществляется путем постоянного удержания подводного аппарата точно над трассой подводного объекта. Для этого измеряют боковое и угловое смещения подводного аппарата относительно подводного объекта и по их сигналам корректируют программу управления движением подводного аппарата по трассе прокладки подводного объекта.
Будем считать, что подводный аппарат расположен параллельно подводному объекту или с небольшим угловым отклонением (cosγ ≃ 1) (см. фиг.2). На 0-м шаге используют в качестве приемных диполей электроды M1, М2 и N1, N2. Как у поля возбуждения, так и наведенного поля в этом случае силовые линии направлены вдоль подводного аппарата. Напряжения этих пар электродов будут далее вычитаться, напряжения непосредственно от поля возбуждения будут взаимно компенсироваться и далее не учитываются.
Для диполей М1, М2 и N1, N2 разность потенциалов определяют по формуле
UM = K1 • K3 • I • r-3 • rM -2, (8)
UM = K1 • K3 • I • r-3 • rN -2, (9)
где K3 - конструктивная постоянная, rM - расстояние от диполя M1, M2 до подводного объекта, rN - расстояние от диполя N1, N2 до подводного объекта.
Разница между UM и UN обусловлена разницей в расстояниях rM и rN, которые равны
rM 2 = h2 + (b + y)2, (10)
rN 2 = h2 + (b + y)2, (11)
где h - высота диполей М1, М2 и N1, N2 над подводным объектом, 2b - расстояние между электродами M и N.
Учитывая, что r2 = h2 + y2, определяют разность UM и UN:
Таким образом, сигнал Us3 оказывается пропорциональным отклонению y в поперечном направлении (см. фиг.4).
Таким образом, заявленный способ обнаружения и отслеживания электроприводного протяженного подводного объекта с борта подводной поисковой установки позволяет получить как минимум три взаимодополняющих сигнала U0, U1, U2, позволяющих точно рассчитать угловое отклонение подводного аппарата от трассы прокладки подводного объекта; выработать сигнал Vs, величина которого позволяет четко определить при движении подводного аппарата факт прохождения над подводным объектом независимо от угла пересечения подводного объекта; определить при движении вдоль трассы подводного объекта боковое смещение подводного аппарата, используя для этого сигнал Us3.
Последовательность действий подводного аппарата при поиске и отслеживании подводного объекта сводится в основном к выполнению двух операций: при поиске подводного объекта аппарат должен двигаться до пересечения с подводным объектом, зафиксировать момент и координаты пересечения и оценить направление залегания подводного объекта; после надежного определения подводного объекта сменить направление движения так, чтобы выйти в режим отслеживания подводного объекта, используя для этого информацию об ориентации подводного аппарата по отношению к подводному объекту.
Первая операция может повторяться в случае нарушения режима отслеживания подводного объекта.
Рассмотрим основные свойства выходных сигналов заявленного способа при выполнении подводным аппаратом указанных операций. В процессе поиска подводного объекта основным сигналом является Vs (7). Его изменение по траектории движения подводного аппарата в районе пересечения подводного аппарата показано для разных углов пересечения на фиг. 3. Величина сигнала максимальна в точке пересечения и дальше убывает пропорционально r5. Понятно, что наиболее четкая фиксация места пересечения возможна при почти поперечных пересеченных (γ 90o). Поскольку  где S = x/sinγ - горизонтальное расстояние от подводного объекта, легко подсчитать при каком расстоянии от траектории сигнал будет равен, например, половине своего максимального значения
где S = x/sinγ - горизонтальное расстояние от подводного объекта, легко подсчитать при каком расстоянии от траектории сигнал будет равен, например, половине своего максимального значения
При γ = 90o X = 0,56•h, при γ = 30o X = 1,12h, а при γ = 0 X = ∞ (этот последний случай можно считать невероятным и он соответствует режиму отслеживания объекта). Если h = 3 м, γ = 90o и скорость подводного аппарата 1 м/с, то верхняя половина импульса будет длиться около 1с, достигая 2с при γ = 30o.
Переменная γs (6) позволяет определить угол γ пересечения трассы подводного объекта. Знание U1 и U2 (2 и 3) позволяет разрешить неоднозначность γs.
При отслеживании подводного объекта для управления подводным аппаратом необходимы данные об угле отклонения γ и боковом смещении y. Информация об угле отклонения содержится в сигналах U0, U1 и U2 (1, 2 и 3). Информационная избыточность этих сигналов позволяет выработать переменную Vs, необходимую при поиске, исключить неоднозначность определения γ повысить надежность и точность. Графики зависимости U0 - U2 от γ показаны на фиг.5.
Для определения поперечного смещения подводного аппарата используется сигнал Us3 (12). Из данного выражения следует, что сигнал Us3 пропорционален боковому отклонению y, правда в ограниченной зоне. Коэффициент пропорциональности убывает при удалении подводного аппарата от подводного объекта. График зависимости Us3(y) показан на фиг. 4. Рабочая зона сигнала сохраняется при удалении y порядка высоты подводного аппарата над подводным объектом.
Институтом проведены лабораторные и натурные морские испытания заявленного способа обнаружения и отслеживания электропроводного протяженного подводного объекта с борта автономного необитаемого подводного аппарата. Как показали результаты испытаний, данный способ позволил решить поставленную задачу, а именно: обнаруживать с высокой точностью подводный объект непосредственно во время движения подводного аппарата под любым курсовым углом относительно трассы прокладки подводного объекта и определять его ориентацию; непрерывно отслеживать трассу прокладки подводного объекта в процессе движения подводного аппарата вдоль трассы.
Кроме того, в процессе испытаний выявлено, что данный способ позволяет также определять свойства подводного объекта за счет изменения частоты тока во время возбуждения электромагнитного поля; осуществлять калибровку угловых измерений за счет использования избыточной информации от возбуждения электромагнитного поля по меньшей мере в трех направлениях; применение автономного необитаемого подводного аппарата в качестве подводной поисковой установки позволило возбуждающие диполи расположить по длине аппарата и тем самым увеличить длину этих диполей, а следовательно, и дальность действия способа; применение высокоманевренного, глубоководного подводного аппарата позволит осуществлять поиск, обнаружение и отслеживание подводных объектов на глубинах до 6000 метров.
Источники, принятые во внимание
1. СССР, авторское свидетельство N 968776, М.Кл.3 G 01 V 3/10, 1981 (опубл.23.10.82 г., бюлл, N 39);
2. СССР, авторское свидетельство N 569987, М.Кл.2 G 01 V 3/08 (опуб. 25.08.77 г., бюлл. N 31) - прототип.
Изобретение относится к области электромагнитных исследований и может быть использовано преимущественно для поиска, обнаружения, распознавания и отслеживания трасс подводных протяженных металлосодержащих объектов, в том числе и заиленных в донный грунт, например, подводных трубопроводов, силовых кабелей и т.д. В способе обнаружения и отслеживания электропроводного протяженного подводного объекта с борта подводной поисковой установки в качестве последней используют автономный необитаемый подводный аппарат, причем точки излучения и измерения электромагнитного поля располагают по бортам вдоль аппарата непосредственно на его внешней формообразующей поверхности. Возбуждение электромагнитного поля осуществляют дипольным источником излучения последовательно по меньшей мере по трем направлениям, первоначально вдоль продольной оси подводного аппарата по направлению его движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, с одновременным изменением частоты тока во время возбуждения по каждому направлению излучения. Измерение вторичного электромагнитного поля выполняют по меньшей мере в четырех точках подводного аппарата и по величине напряжений в них судят о наличии протяженного подводного объекта и фиксируют его ориентацию в горизонтальной плоскости относительно излучающего и приемного диполей, а по измеренным угловому и боковому смещениям подводного аппарата относительно трассы прокладки протяженного подводного объекта выполняют отслеживание последнего. Технический результат: возможность обнаруживать с высокой точностью протяженный металлосодержащий подводный объект непосредственно во время движения подводного аппарата под любым курсовым углом относительно трассы подводного объекта и определить его ориентацию, возможность непрерывно отслеживать трассу прокладки подводного объекта в процессе движения подводного аппарата вдоль трассы. 3 з.п. ф-лы, 5 ил.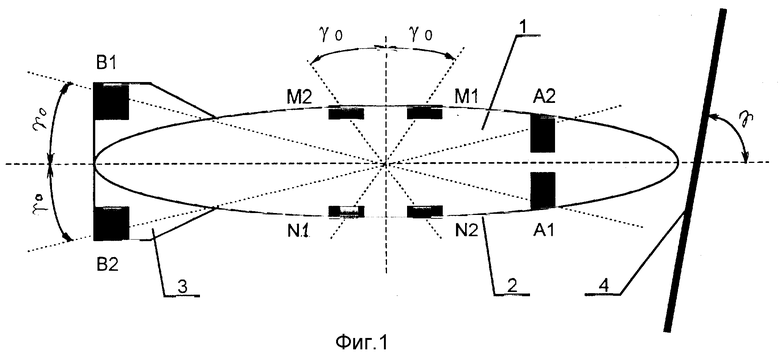
| Способ определения трасс прокладки подводных трубопроводов | 1975 |
|
SU569987A1 |
| Способ электромагнитной геофизической разведки | 1981 |
|
SU968776A1 |
| US 3808519 A, 1974 | |||
| US 3875497 A, 1975. | |||

