Изобретение относится к области автоматики, в частности, к гироскопическим устройствам, где под датчиком момента понимается функциональный преобразователь, входной величиной которого является электрический сигнал постоянного или переменного тока, а выходной величиной - момент.
Известны торцовые датчики момента, содержащие основание из магнитомягкого материала с закрепленными на нем постоянными магнитами, намагниченными в осевом направлении с чередуюи ейся полярностью, ярмо из магнитомягкого материала и сосредоточенную катушечную обмотку, каждая из катушек которой находится на немагнитном дисковом каркасе, размещенном в рабочем зазоре, между постоянными . магнитами и ярмом датчика момента.
Недостатком указанных торцовых датчиков момента является малая крутизна выходной характеристики, определяемая при прочих равных условиях допустимым радиальным размером датчика.
Цель изобретения - повышение крутизны выходной характеристики при неизменных габаритах. Это достигается тем, что в предлагаемом датчике полюсные наконечники охватывают ярмо с трех сторон, причем рабочая обмотка выполнена кольцевой и охватывающей ярмо. Фиксация последнего относительно
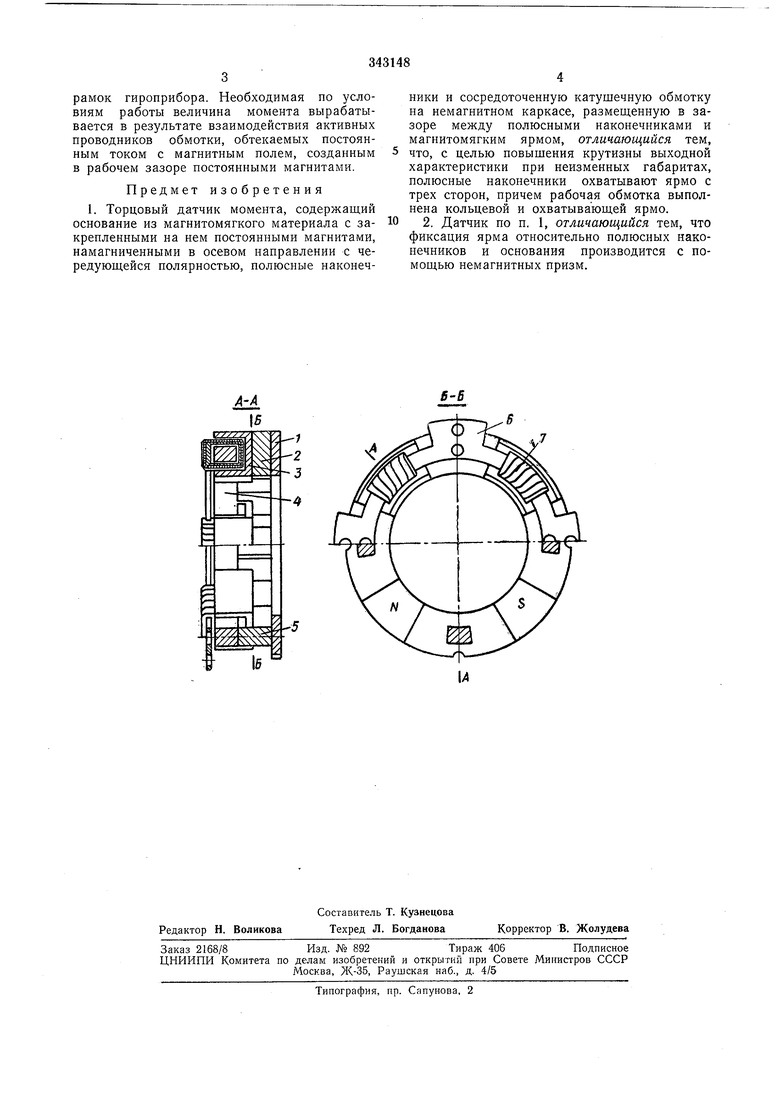
полюсных наконечников и основания производится при помощи немагнитных призм. На чертеже показан датчик момента. Датчик состоит из основания 7 с закрепленными на нем постоянными магнитами 2, намагниченными в осевом направлении с че-. редующейся полярностью. Каждый из магнитов 2 снабжен полюсным наконечником 3, имеющим впадину в осевом направлении датчика. Во впадинах полюсных наконечников устанавливается магнитомягкое ярмо 4, фиксация которого относительно наконечников 3 и основания производится при помощи немагнитных призм 5. В рабочем зазоре датчика,
образованном наконечниками 3 и ярмом 4, устанавливается немагнитный каркас 6 с секционированной по числу магнитов обмоткой 7. В собранном состоянии каркас с обмоткой перемещается на некоторый угол относительно наконечников 3. В зависимости от конструкции гироприбора ротором датчика момента могут быть или каркас с обмоткой 7, или жесткая магнитная система, состоящая из основания, магнитов, полюсных наконечников, ярма и призм.
В рабочем положении ротор датчика момента жестко скрепляется с элементом конструкции гироприбора, на котором в процессе работы необходимо подавать силовое воздейрамок гироприбора. Необходимая по условиям работы величина момента вырабатывается в результате взаимодействия активных проводников обмотки, обтекаемых постоянным током с магнитным полем, созданным в рабочем зазоре постоянными магнитами.
Предмет изобретения
1. Торцовый датчик момента, содержащий основание из магнитомягкого материала с закрепленными на нем постоянными магнитами, намагниченными в осевом направлении с чередующейся полярностью, полюсные наконечНИКИ и сосредоточенную катушечную обмотку на немагнитном каркасе, размещенную в зазоре между полюсными наконечниками и магнитомягким ярмом, отличающийся тем, что, с целью повыщения крутизны выходной характеристики при неизменных габаритах, полюсные наконечники охватывают ярмо с трех сторон, причем рабочая обмотка выполнена кольцевой и охватывающей ярмо.
2. Датчик по п. 1, отличающийся тем, что фиксация ярма относительно полюсных наконечников и основания производится с помощью немагнитных призм.
5-fi
