I
Изобретение относится к приборам точной электромеханики и ыожет быть применено, например, в гироскопических и акселерометрических Приборах.
Известны датчики моментов, содержащие кольцевые рамки, охватывающие магнитопровод.
Однако они имеют значительные габариты из-за наличия магнитов в центре датчика.
Целью изобр етения является уменьшение габаритов датчика.
Для этого внутренний магнитопровод выполнен в виде кольцевого диска, внешний - в виде кольца с внутренним бурти ком, а магниты-в виде кольцевых сегментов, расположенных между рамка1ми и скрепленных торцами с магнитопроводами. Кроме того, внутренний магнитопровод снабжен ступенями в местах под сегментами катушек.
Изобретение пояснено чертежами.
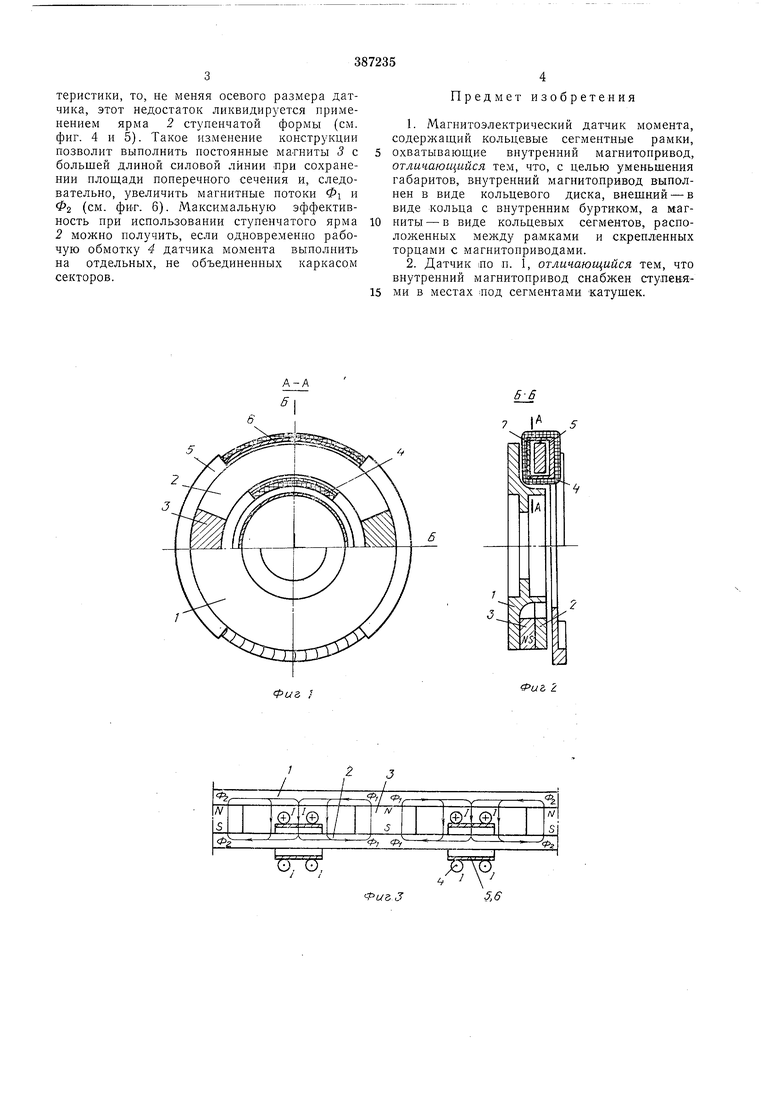
На фиГ. 1 приведена схема магнитоэлектрического датчика момента; на фиг. 2--датчик в разрезе; на фиг. 3- взаимодействие .магнитных потоков с обмотками; на фиг. 4 - датчик с ярмом ступенчатой формы; на фиг. 5 - разрез датчика с ярмом ступенчатой формы; на фиг. 6 - магнитные потоки для датчика с ярмом ступенчатой формы.
Магнитоэлектрический торцевой датчик момента содержит (см. фиг. 1 и 2) основание / и ярмо 2, изготовленных из магнитомягкого материала, между которыми расположены постоянные магниты 3, и кольцевой рабочей обмот|ки 4, намотанной на немагнитный каркас 5, выступы 6 которого охватывают с конструктивным зазором ярмо 2. Торцевая часть каркаса 5 перед намоткой обмотки 4
закрывается немагнитной пластиной 7. В собранном состоянии каркас 5 с обмоткой 4 может свободно перемещаться на некоторый угол относительно ярма 2. В зависимости от конструкции гироприбора ротором датчика
момента могут быть или каркас 5 с обмоткой 4, или магнитная система, состоящая из жестко скрепленных с постоянными магнитами 3 основания / и ярма 2.
Рабочий момент в предло кенном датчике образуется при взаимодействии активных проводников каждой из катушек обмотки 4, расположенных в пространстве между магнитами 3 и обтекаемых током /, с магнитными потоками Ф и Ф, созданными в пространстве между основанием / и ярмом 2 соседними магнитами 3 (см. фиг. 2).
Если конструкция магнитоэлектрического датчика момента по фиг. 1 не обеспечивает
заданный уровень крутизны выходной характеристики, то, не меняя осевого размера датчика, этот недостаток ликвидируется применением ярма 2 ступенчатой формы (см. фиг. 4 и 5). Такое изменение конструкции позволит выполнить постоянные магниты 3 с большей длиной силовой линии при сохранении площади поперечного сечения и, следовательно, увеличить магнитные потоки 0i и 02 (см. фи-г. 6). Максимальную эффективность при использовании ступенчатого ярма 2 можно получить, если одновременно рабочую обмотку 4 датчика момента выполнить на отдельных, не объединенных каркасом секторов.
Предмет изобретения
1.Магнитоэлектрический датчик момента, содержаш,ий кольцевые сегментные рамки,
охватывающие внутренний магнитопривод, отличающийся тем, что, с целью уменьшения габаритов, внутренний магнитонривод выполнен в виде кольцевого диска, внешний - в виде кольца с внутренним буртиком, а магниты - Б виде кольцевых сегментов, расположенных между рамками и скрепл;енных торцами с магнитоприводами.
2.Датчик 1по п. 1, отличающийся тем, что внутренний магнитопривод снабжен ступевями в местах под сегментами катушек.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК МОМЕНТА | 1973 |
|
SU405032A1 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК МОМЕНТА | 1973 |
|
SU405031A1 |
| ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА | 2006 |
|
RU2328001C2 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829315C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2003 |
|
RU2250433C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |

А-А
5
2
Фиа /
Б-S
Фиъ 2
fV П
Ф, Pi
J
5
3
r-r
Фиг
Фиг, 5
