Изобретение касается электроприводов, а Именно электропривода механизмов с .кривошипнюй передачей, преимущественно станковкачалок (глубиннонасодаых нефтедобывающих устанювок.
Работа станка-1качал.ки характеризуется ци1К1Лическим графиком нагрузк1И с периодом ди1кла, равным продолжительности одного качания. Вследствие значительной неравномерности графика нагрузки, возрастает величина максимальной и среднеквадратичиой мощности, что приводит к завышению установленной мощности приводного электродвигателя и ухудшению его энергетических показателей.
Кромб того, в следствие жесткой механической характеристики электро1привода станкакачалки с асинхронным короткозамкнутым электродвигателем - наиболее распространенным электроприводом станка-качалки - возникают больщие динамические моменты и динамические усилия в -насосных штангах и других коБСтруктивньк узлах станка-качалки.
С целью уменьшения динамическ1их усилий для привода станка-качалки используется асинхронный эле ктродвигатель повышен-ного скольже)ния. В известном электроприводе обратная овя1зь, уменьшающая динамические нагрузки ста«ка, является впутревней о-братной .связью двигателя, обладающего мягкой механической характеристикой.
Мягкая механическая характеристика двигателя повыщенЕого скольжения позБоляет использовать маховые массы установки, что способствует выравниванию графика натрузки электродвигателя.
Однако приме нение двигателей с повыщенным скольжением приводит лишь к частичному выравниванию графика нагрузии, а следовательно к незначительному уменьшению установленной мощности электродвигателя и к 1нез.начителы1ому снижению динамических моментов « динамических усилий. Энергетические показатели электропривода, такие как средний эксплуатационный к. п. д. и. коэффициент мощности, остаются низкими.
Целью изобретения является повышение эффективности иопользования в механизмах с кривошипной передачей, преимущест-венно в станках-качалках с поршневым насосом. Для этого в цепь обратной связи включен индуктивный датчик, взаимодействующий с кулач1ком, -профиль которого соответствует построенной в полярных координатах кривой одного цикла изменения момента нагрузки двигателя, снятой для привода без обратной связи, причем кулачок установлен со сдвигом его малой оси от оси кривошипа станка-качалки на угол не менее 45°.
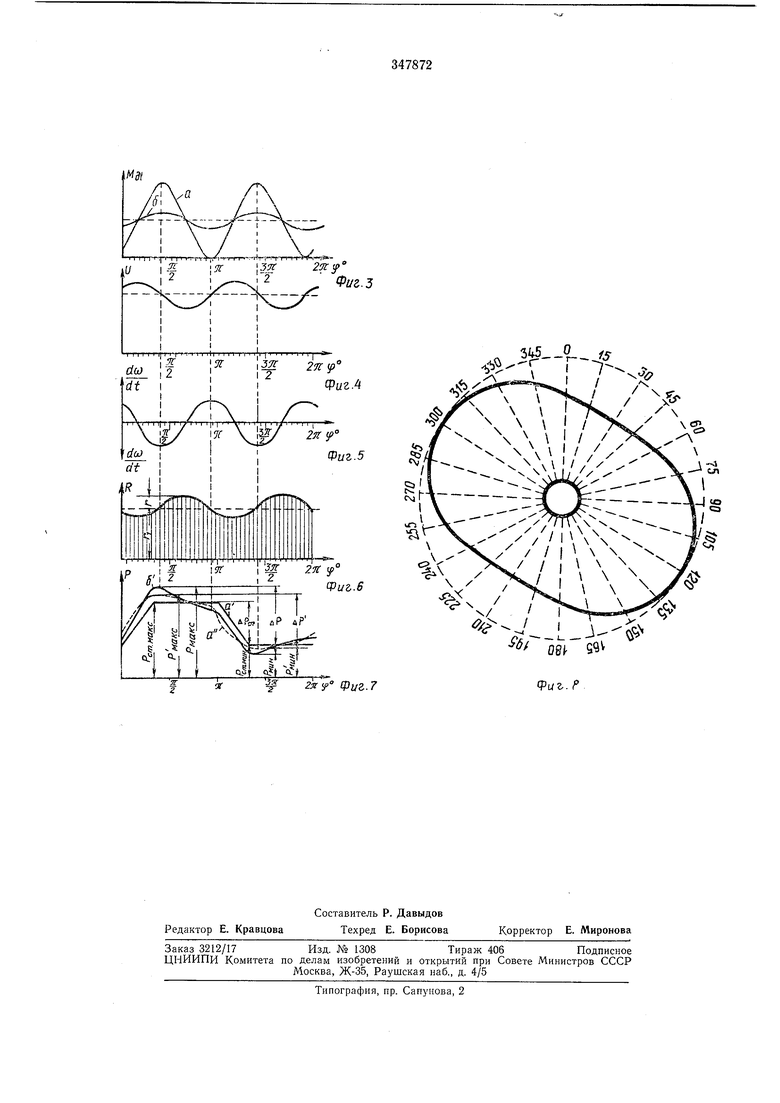
На фиг. 1 показана блок-схема предложснно-го электропривода; на фиг. 2 .принципиальная схема электропривода, с тиристорным преобразователем; на фиг. 3 - кривая а- момент нагрузки двигателя без включенной обратной связи, кривая б - момент «агруаки двигателя с включенной абратной связью; на фиг. 4 - напряжение на выходе преобразователя; на фиг. 5 - угловое ускорение двигателя; на фиг. 6 - развернутая кривая профиля кулачка; на фиг. 7 -кривая а- статическая нагрузка на штанги, кривая б - нагрузка на штанги с учетом динамической нагрузки без включенной обратной связи, кривая а - нагрузка на штаипи с учетом динамической нагрузкги при включенной о братной связи; на фиг. 8 - профиль кулачка.
БлОК-схема содержит трехфазный тиристорный преобразователь /, систему 2 управления тнристорным преобразователем, усилитель 3 постоянного тока, двухполупериодный выпрямитель 4, индук тивный датчик 5, фигурный .кулачок & и двигатель 7 постоянного тока.
При работе глубиинонасосной установки фигурный кулачок 6, устанавливаемый на валу кривошипа станка-качалки, перемешает сердечник индуктивного датчика 5, изменяя тем самым выходное (напряжение этого датчика. С выхода индуктивного датчика 5 напряжение через двухполупериодный выпрямитель 4 поступает на вход а-б усилителя 3 постоянного то.ка, с выхода которого - на вход системы 2 управления тиристорным преОбразователем I (см. фиг. 2). С выхода тир:иCTOpHQiro преобразователя / напряжение поступает на якорь дви гателя 7 постоянного тока.
При крайнем нижнем положении сердечника индуктивного датчика напряжение на входе системы 2 управления тиристорным преобразователем -миним ально, напряжение на вььходе тиристорного преобразователя /- максимально. При крайнем верхнем положении Сердечника индуктивного датчика, напряжение на входе системы 2 управления тири.сторным преобразователем - максимально, напряжение на вых,оде тиристорного преобразователя /-(Минимально.
Профиль кулачка (см. фиг. 8) соотаетствует уравнению
/ г, - г cos 2 («ср/; -f К/2 - 45°) где
Ez arctg/,
К.-коэффициент, определяемый нагрузкой, и скоростью станка-качалки.
Так как момент, развиваемый двигателем, равен:
Жд, Же. УИе. + /,
ТО для тогОэ чтобы сгладить нагрузочную диаграм,му двигателя необходимо, чтобы при ма;ксимальном и минимальноМ статических моментах двигателя динамический моме.чт принимал бы соответственно максимальное отрицательное и максимальное положительное значения.
Придав кулачку определенный профиль (см. фиг. 4) и отрегулировав систему так, чтобы при (Минимальном моменте угловое ускорение вращения двигателя достигало бы максимального положительного значения (разгон двигателя), а при максимальном моменте угловое ускоре.ние вращения двигателя достигало бы максимального отрицательного значения (замедление двигателя), можно добиться существенного сглаживания нагрузочной диаграммы электродвигателя станкакачалки.В случае наобходимости регулирования производительности глубиннонасосной установки изменение числа качаний станка-качалки достигается регулированием напряжения, поступающего на вход с-б усилителя постоянного тока 5.
Предмет и з о .6 р е т е н и я
Электропривод постоянного тока, выполненный по системе управляемый .прео-бразователь-двигатель с цепью обратной связи, отличающийся тем, что, с целью повышения эффективности использования в механизмах с кривошипной передачей, преимущественно в стайках-качалках с поршневым насосом, в цепь обратной связи включен индуктивный датчик, взаимодействующий с установленным на валу кулачком, профиль которого соответствует построенной в полярных координата кривой одного цикла изменения момента нагрузки двигателя, снятой для пр.ивода без обратной связи, причем кулачок установлен со сдвигом его малой оси .от оси кривошипа на угол не меньший 45°.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод станка-качалки для глубиннонасосной установки | 1973 |
|
SU504284A1 |
| Устройство для управления электроприводом станка-качалки глубиннонасосной установки | 1974 |
|
SU515232A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2210004C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2230229C1 |
| Устройство для управления двигателем постоянного тока | 1978 |
|
SU748762A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2227848C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2095931C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1999 |
|
RU2154892C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 1995 |
|
RU2129666C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В СИСТЕМЕ ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ | 2011 |
|
RU2457611C1 |

h--J. 5
Фг/г.з
211 у
фуг.5
2л у° Фг/г.7
5
$
Фиг./
