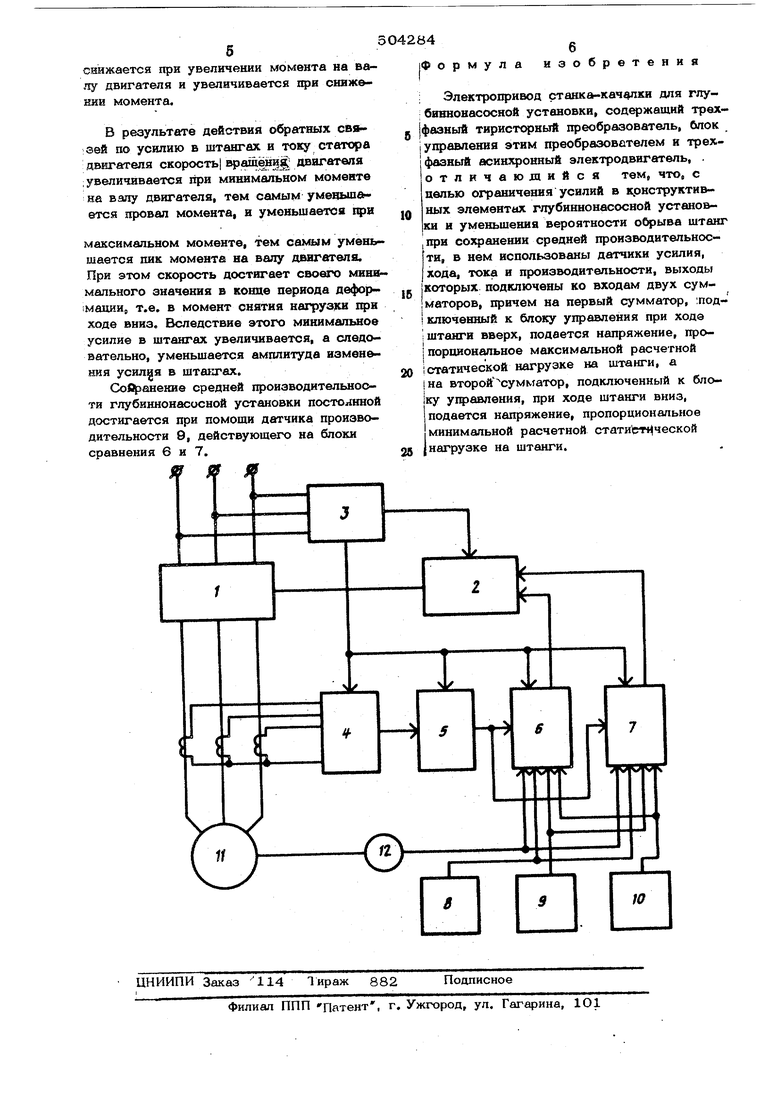
(разксють между максимальной и мини мапьяой нагрузкой на штанги( пряволит к снижению прочности колонны штанг, сп довательно, к брпее частому .обрьс шта , Применение устройства с программным кулачком приводит к существенному выравниванию нагрузочной диаграммы алвкт ропривода станка 4сачапки и к несколько большему снижению максимальных усилий и амплитуды изменения усилий в штангах тяжелых станков-качалок н к увеличению усилий в штангах легких станков качалок. Однако эти изменения максимальных усилий и амплитуды изменения усилий в штангах также происходят в незначитель ных пределах. Кроме того, в связи с тем, что точньгй профиль кулачка определяется исходя из конкретной кривой изменения момента на валу двигателя, который зависит от режима откачки (диаметра насоса, длины хода, число качаний, глубин Ь1 подвески насоса), типа станка-качалки, г.еолого-эксплуатационных свойств месторождения, то для каждой глубиннонасосной установки требуется- определенный профиль, соответствующий данной нагрузочной диаграмме. Целью изобретения является Существенное выравнивание графика нагрузки электропри вода станков-качалок при одновременном ограничении максимальных усилий и амплитуды изменения усилий в штангах как тяжелых, так и легких станков-качалок с помощью устройства,единого для всех типов станков-качалок и режимов откачки. Предлагаемое устройство позволяет уменьшить установленную мощность электродвигателя, повысить к.п.д. и коэффициент мощности электродвигателя, снизить колебания напряжения в сети, улучшить условия работы штанг и снизить количество обрывов штанг, увеличить межремонтный период работы глубиннонасосной ус- танЬвки. Указанная цель досглгается применением обратной связи в функции усилия в штангах, тока нагрузки двигателя, производительности станка-качалки и датчика хода станка-качалки в системетиристорный преобразователь-двигатель. На чертеже показана схема регулируемого тиристорного электропривода переменного тока станка-качалки, позволяющая выравнить нагрузочную диаграмму двигателя при одновременном ограничении динамических усилий и амплитуды усилий в штангах. Электропривод состоит из тиристорного преобразователя 1, блока управления 2 тирнсторным преобразователеМ| блока питания 3, выпрямителя 4, усилителя постоянного тока 5, блоков сравнения 6 и 7, датчика усилия 8, датчика производительности 9, датчика хода 10, асинтронного двигателя 11 и тахогенератора 12. При работе глубиннонасосной установки датчик хода 10 при ходе штанг вверх подсоединяет к блоку управления 2 тирист6рным| преобразователем блок сравнеHHkiSt а при ходе внигГ:- блок сравнения 7. На блок сравненкя в подается натфяжение сравнения, пропорциОнальное максимальной расчетной статической нагрузке на штанги Р.и напряжение, ет.макс. снимаемое с датчика усилия, В случае, если напряжение сравнения больше напряжения, снимаемого с датчика усилия, то скорость вращения двигателя увели вается; в случае, если напряжение сравнения меньше напряжения, снимаемого с датчика усилия, то скорость вращения двигателя уменьшается. Кроме того на блок сравнения 6 подается напряжение, пропорциональное току статора (обратная связь по току), благодаря которой скорость вращения двигателя сиижается при увеличении момента на валу двигателя и увеличивается при снижении момента. В результате действия обратных связей по усилию в штангах и току статора двигателя скорость вращения увеличивается при минимальном моменте на валу двигателя, тем самым уменьшается провал момента, и уменьшается при максимальном моменте, тем самым уменьшается пик момента на валу двигателя. При этом .скорость достигает своего минимального значения в конце периода деформации, т.е. в момент приложения нагрузки при ходе врерх. Вследствие этого максимальное усилие в штангах уменьшается. На блок сравнения 7 подается напряжение сравнения, пропорциональное минимальной расчетной статической нагрузке на штанги РСТ.МИН напряжение, снимаемое с датчика усилия. В случае, если напряжение сравнения больше напряжения, снимаемого с датчика усилия, то скорость вращения двигателя уменьшается; в случае, если напряжение сравнения меньше напряжения, снимаемого с датчика усилия, то скорость вращения двигателя увеличивается. Кроме того, на блок сравнения 7 подается напряжение, пропорциональное току статора (обратная связь по току), благодаря кoтopoйi аналогично, как и при ходе вверх, скорусть Вращения двигателя снижается при увеличении момента на валу двигателя и увеличивается при сниж&нии момента. В результате действия о атных связей по усилию в штангах и току статора двигателя скорость| щзвгателя : увеличивается при минимальном моменте на валу двигателя, тем самым ется провал момента, и уменьшается при максимальном моменте, тем самым уменьшается пик моменте на валу двигателя. При этом скорость достигает своего мини мального значения в конце периода дефор маиии, т.е. в момент снятия нагрузки при ходе вниз. Вследствие этого минимальное усилие в штангах увеличивается, а следовательно, уменьшается амплитуда измени ния в шттагах. Совранение средней производительности глубиннонасосной установки постоянной достигается при помощи датчика производительности 9, действующего на блоки сравнения 6 и 7. Ж J9 84 изобретения |ф о р м у л а Электропривод станка-качалки для глубивновасосяой установки, содержащий трехфазный тиристорный преобразователь, блок . управления этим преобразователем и трехфазный асинхронный электродвигатель, . отличаюлдийся тем, что, с целью ограничения усилий в крнструктивных элементах глубиннонасосной установки и уменьшения вероятности штанг ,при сохранении средней производительности, в нем использованы датчики усилия, хода, тока и производительности, выходы (которых подключены ко входам двух сум|маторов, причем на первый сумматор, .подI ключенный к блоку управления при ходе i штанга вверх, подается напряжение, проI порциональное максимальной расчетной статической нагрузке на штанги, а |на второй сумматор, подключенный к блоку управления, при ходе штанги вниз, подается напряжение, пропорциональное минимальной расчетной статиЬт ческой нагрузке на штанги.
..:
Н
11
