Устройство относится к области регулирования энергетических систем. Известно, что с помощью управляемого реактора (УР), оснащенного регулятором сильного действия (АРВ) можно демпфировать колебания роторов параллельно работающих с ним синхронных машин при больших возмушениях и тем самым повысить устойчивость и улучшить качество переходных процессов в энергосистеме. При этом реактор воздействует на систему через посредство изменения своей реактивной мощности и, следовательно, напряжения в точке его подключения.
Известен автоматический регулятор возбуждения управляемого реактора, содержащий датчик отклонения напряжения, дифференциатор отклонения напряжения, датчик рабочей частоты с частотно-амплитудным преобразователем, сумматор, ко входам которого подключены выходы датчиков отклонения напряжения дифференциатора, и выходной усилитель, выход которого подключен к возбудителю реактора. Выход последнего связан с сумматором цепью гибкой обратной связи.
Известный регулятор не может обеспечить достаточной точности регулирования напряжения и устойчивости энергосистемы, так как для демпфирования колебаний необходим достаточно высокий коэффициент усиления по производной угла (или по отклонению частоты
напряжения шин приемной подстанции или э.д.с. синхронной машины). В случае линий электропередач большой протяженности напряжение в точке подключения реактора сильно зависит от реактивной мощности Q, выдаваемой или потребляемой компенсирующим устройством, так как велико значение производной-. Поэтому известная система автомаdQ
тического регулирования оказывается весьма чувствительной к колебаниям угла. При наличии в узле нагрузки нескольких достаточно мощных синхронных мащин, указанные очень малые колебания и флуктуации угла наблюдаются все время, что вызывает соответствующую реакцию регулятора и, как следствие этого, колебания и флуктуации напряжения 3 узле нагрузки в установившемся режиме. С целью повышения точности регулирования и устойчивости энергосистемы в предлагаемом устройстве регулятор снабжен нелинейным преобразователем, вход которого подключен к выходу частотно-амплитудного преобразователя, а выход к одному из входов
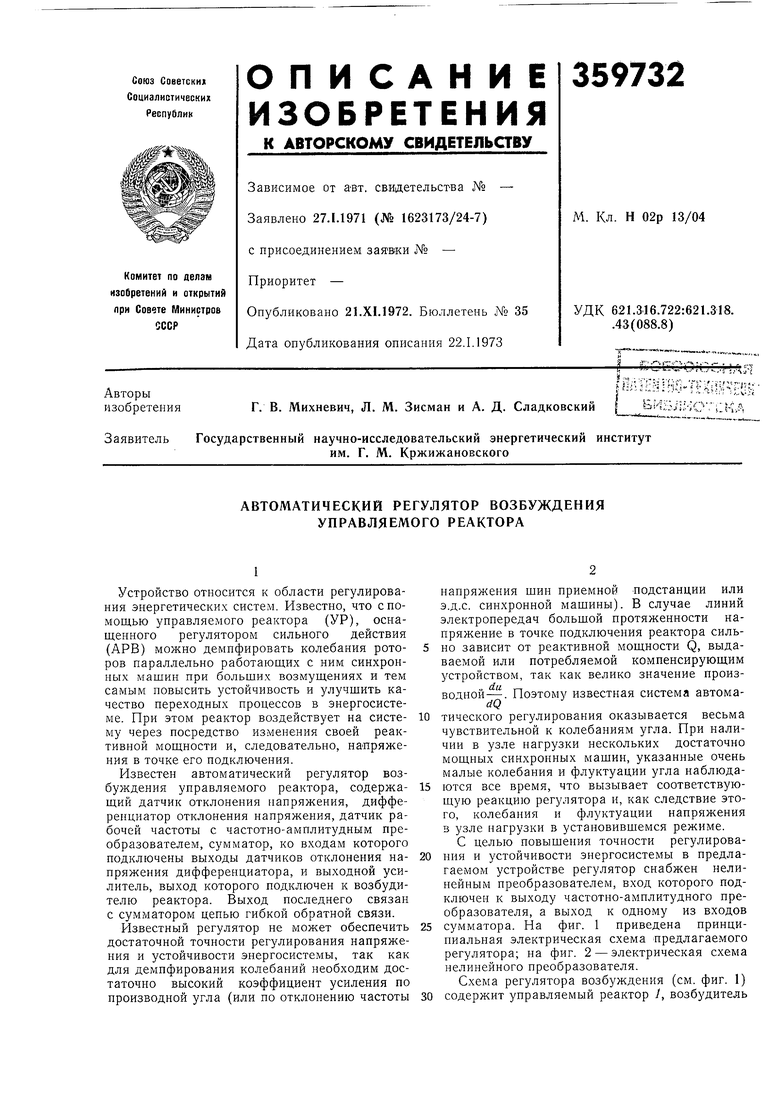
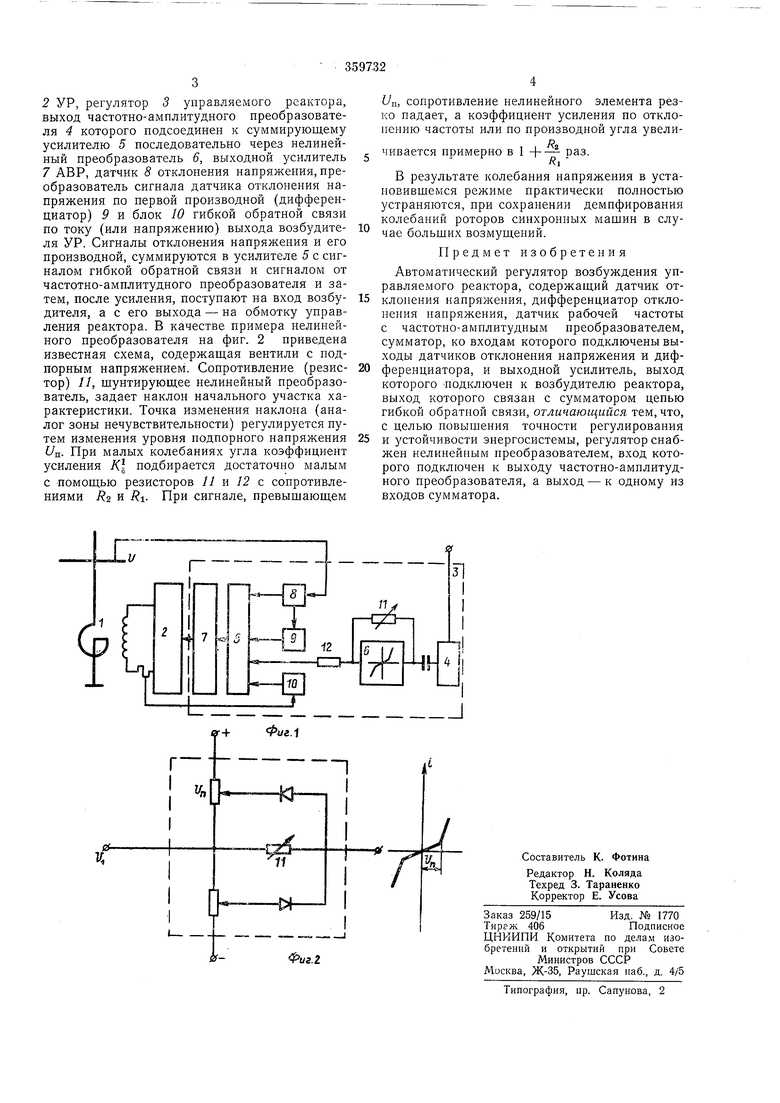
сумматора. На фиг. 1 приведена принципиальная электрическая схема предлагаемого регулятора; на фиг. 2 - электрическая схема нелинейного преобразователя. Схема регулятора возбуждения (см. фиг. 1)
2 УР, регулятор 3 управляемого реактора, выход частотно-амплитудного преобразователя 4 которого подсоединен к суммирующем у усилителю 5 последовательно через нелинейный преобразователь 6, выходной усилитель 7 АВР, датчик 8 отклонения напряжения, преобразователь сигнала датчика отклонения напряжения по первой производной (дифференциатор) 9 и блок 10 гибкой обратной связи по току (или напряжению) выхода возбудителя УР. Сигналы отклонения напряжения и его производной, суммируются в усилителе 5 с сигналом гибкой обратной связи и сигналом от частотно-амплитудного преобразователя и затем, после усиления, поступают на вход возбудителя, а с его выхода - на обмотку управления реактора. В качестве примера нелинейного преобразователя на фиг. 2 приведена известная схема, содержащая вентили с нодпорным напряжением. Сопротивление (резистор) 11, шунтирующее нелинейный преобразователь, задает наклон начального участка характеристики. Точка изменения наклона (аналог зоны нечувствительности) регулируется путем изменения уровня подпорного напряжения бп. При малых колебаниях угла коэффициент усиления /С- подбирается достаточно малым с помощью резисторов 11 ii 12 с сопротивлениями и Ri. При сигнале, превышающем
г
Пг
J г
«.-I 9 1 , .,
-f и 1 ,
г+ ФигЛ
t/n, сопротивление нелинейного элемента резко падает, а коэффициент усиления по отклонению частоты или по производной угла увеличивается примерно в 1 -|- раз. RI
В результате колебания напряжения в установившемся режиме практически полностью устраняются, при сохранении демпфирования колебаний роторов синхронных машин в случае больших возмущений.
Предмет изобретения
Автоматический регулятор возбуждения управляемого реактора, содержащий датчик отклонения напряжения, дифференциатор отклонения напряжения, датчик рабочей частоты с частотно-амплитудным преобразователем, сумматор, ко входам которого подключены выходы датчиков отклонения напряжения и дифференциатора, и выходной усилитель, выход которого подключен к возбудителю реактора, выход которого связан с сумматором цепью гибкой обратной связи, отличающийся тем, что, с целью повышения точности регулирования
и устойчивости энергосистемы, регулятор снабжен нелинейным преобразователем, вход которого подключен к выходу частотно-амплитудного преобразователя, а выход - к одному из входов сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ РЕАКТИВНОЙ МОЩНОСТИ в ЭНЕРГОСИСТЕМАХ | 1970 |
|
SU279777A1 |
| Регулятор возбуждения для синхронного генератора | 1980 |
|
SU991573A1 |
| Автоматический регулятор возбуждения для синхронного генератора с возбудителем | 1983 |
|
SU1159147A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465716C1 |
| Устройство для регулирования возбуждения синхронного генератора | 1986 |
|
SU1376211A1 |
| РЕГУЛЯТОР ВОЗБУЖДЕНИЯ СИНХРОННОЙ МАШИНЫО П т в fc&M Й'-1:>&ЁРТОЗ^ | 1971 |
|
SU428514A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU991575A1 |
| АДАПТИВНЫЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1993 |
|
RU2044401C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2002 |
|
RU2237346C2 |
| Автоматический регулятор статического компенсатора реактивной мощности | 1984 |
|
SU1160504A1 |
