Изобретение относится к классу устройств управления электрическими генераторами с целью получения требуемого значения выходных параметров, в частности для управления возбуждением генератора с целью ослабления вредных влияний перегрузок или переходных процессов, например, при внезапном подключении, снятии или изменении нагрузки, и может быть использовано в составе оборудования для управления синхронными генераторами на предприятиях, вырабатывающих электрическую энергию.
На энерговырабатывающих предприятиях существуют проблемы с обеспечением требуемого уровня качества и стабильности поставки электрической энергии, что подтверждается имеющими место инцидентами и отказами в работе энергооборудования. Достичь высоких качественных показателей электроэнергии, повышения к.п.д. и снижения затрат на ввод оборудования в эксплуатацию возможно только при повышении стабильности функционирования и снижении риска аварийности энергоустановок, электростанций и энергосистем в целом.
Как показали исследования, одной из основных причин нарушения стабильности поставки электроэнергии и снижения ее качества в локальном и глобальном масштабе являются электромеханические переходные процессы, возникающие в электрических генераторах вследствие локальных возмущений в энергосистемах. Электрические характеристики современных энергосистем находятся в процессе постоянной флуктуации: вводятся новые или отключаются постоянно действующие потребители, производится перевод мощностей на смежные сети, вводятся мощности и возникают локальные аварии.
Стабильность работы и эффективность использования оборудования энерговырабатывающих предприятий, а также качество вырабатываемой электрической энергии в значительной степени определяются совершенством систем управления возбуждением синхронных генераторов, вырабатывающих электроэнергию.
Величина и длительность переходных процессов в синхронном генераторе определяется точностью настройки параметров (коэффициентов) регулятора возбуждения.
В существующих системах управления возбуждением синхронных генераторов оптимизация параметров регулятора возбуждения производится исходя из состояния энергосистемы на момент настройки. При изменении электрических характеристик энергосистем параметры регулятора возбуждения утрачиваю оптимальность, ухудшаются параметры переходных процессов, сужается диапазон устойчивости регулирования вплоть до полной потери устойчивости и необходимости остановки оборудования.
Предлагаемое изобретение направлено на решение задачи оптимизации характеристик переходных процессов, происходящих в электрических генераторах за счет адаптации параметров регулятора возбуждения к текущему состоянию энергосистемы.
Известно устройство «Регулятор возбуждения синхронного генератора» [1] того же назначения, что и предлагаемое изобретение, содержащее датчик напряжения, аналого-цифровой преобразователь, нечеткий контроллер, цифроаналоговый преобразователь, усилитель мощности, датчик реактивного тока, блок осреднения, сумматор цифровых сигналов и нейросетевой контроллер, обученный выдаче необходимых сигналов в зависимости от входных значений для регулирования возбуждением генератора при неравномерной загрузке параллельно работающих генераторов, при этом датчик напряжения и датчик реактивного тока подключены к выходным зажимам синхронного генератора, выходы датчика напряжения через аналого-цифровой преобразователь подключены к входам нечеткого контроллера, выход датчика реактивного тока соединен с одним из входов блока осреднения реактивных токов и с первым входом нейросетевого контроллера, второй вход нейросетевого контроллера подключен к выходу блока осреднения реактивных токов, выходы нейросетевого и нечеткого контроллеров связаны с входами сумматора цифровых сигналов, выход которого через цифроаналоговый преобразователь подключен к входу усилителя мощности, а его выход соединен с клеммами обмотки возбуждения синхронного генератора.
Недостатком данного устройства является повышенные длительность и величина переходных процессов при изменении параметров энергосистемы благодаря отсутствию адаптации параметров канала регулирования по напряжению (нечеткого контроллера) к параметрам синхронного генератора и энергосистемы. Вторым недостатком данного устройства является низкая стабильность режима возбуждения синхронного генератора благодаря отсутствию в его составе канала регулирования по производной изменения тока обмотки возбуждения.
Известно устройство «Автоматический регулятор напряжения» ([2], стр.93, рис.4.15), содержащее измеритель тока ротора с двумя входами для подачи тока и напряжения генератора, измеритель тока и напряжения статора со входами, совмещенными с одноименными входами измерителя тока ротора, и блок обратной связи по току возбуждения, подключенные к операционному блоку, включающему формирователь уставки, выход которого подключен к первому входу первого сумматора, второй вход которого служит для подачи сигнала по напряжению измерителя тока и напряжения статора, выход указанного сумматора подключен к первому входу интегратора, первому входу второго сумматора и ко входу дифференциатора напряжения, причем второй вход интегратора служит для подачи сигнала по току измерителя тока и напряжения статора, выход интегратора подключен ко второму входу второго сумматора, выход которого подключен ко входу блока форсировки управляющего напряжения, выход данного блока подключен к первому входу усилителя-сумматора, ко второму и третьему входам которого подключены соответственно выходы второго сумматора и дифференциатора напряжения, четвертый вход усилителя-сумматора служит для подачи сигнала с выхода блока обратной связи по току возбуждения, к пятому входу - выход дифференциатора тока, вход которого служит для подачи сигнала измерителя тока ротора в операционный блок, а выход усилителя-сумматора является выходом операционного блока.
По схожести большинства признаков данное устройство принято за прототип.
Недостаток прототипа заключается в ухудшении показателей регулирования возбуждения синхронного генератора при отклонении параметров энергосистемы от исходных значений, при которых настраивался регулятор; не ставится и не решается задача адаптации параметров регулятора к параметрам генератора и энергосистемы.
Сущностью изобретения является устройство регулирования возбуждения синхронного генератора, адаптирующееся к параметрам энергосистемы, функционирующее на основе метода нейросетевой идентификации и применяемое для широкого класса синхронных электрических генераторов.
Сопоставимый анализ с прототипом показывает, что предлагаемое устройство отличается от прототипа тем, что элементы операционного блока выполнены цифровыми, интегратор, дифференциатор тока и дифференциатор напряжения операционного блока дополнительно содержат каждый по два параметрических входа для подачи сигналов постоянной времени и коэффициента усиления, а устройство дополнительно содержит измеритель активной мощности, включающий два входа для подачи тока и напряжения, совмещенные с одноименными входами измерителя тока ротора, датчик частоты напряжения генератора, блок аналого-цифрового преобразования, входы которого подключены к выходам измерителя тока ротора, измерителя тока и напряжения статора, блока обратной связи и измерителя активной мощности, блок цифроаналогового преобразования, вход которого подключен к выходу операционного блока, а выход является выходом устройства, и блок адаптации параметров с шестью входами, причем первый выход блока аналого-цифрового преобразования подключен ко входу дифференциатора тока операционного блока и к первому входу блока адаптации параметров, второй выход - ко второму входу первого сумматора операционного блока и ко второму входу блока адаптации параметров, третий выход - ко второму входу интегратора операционного блока и к третьему входу блока адаптации параметров, четвертый выход - к четвертому входу усилителя-сумматора операционного блока, а пятый выход - к пятому входу блока адаптации параметров, выход датчика частоты напряжения генератора и выход операционного блока подключены соответственно к четвертому и шестому входам блока адаптации параметров, причем блок адаптации параметров выполнен в виде блока задержки с шестью входами и шестью выходами, блока нейросетевой идентификации с девятью сигнальными входами и входом для подачи весовых коэффициентов и с тремя выходами, блока памяти коэффициентов, блока вычисления ошибки нейросетевого предсказания с тремя опорными входами и тремя сигнальными входами, блока коррекции весовых коэффициентов с десятью сигнальными входами, входом для подачи весовых коэффициентов и входом разрешения, блока вычисления коэффициентов регулятора с шестью выходами, блока усреднения с шестью входами и шестью выходами и блока регистрации переходного процесса, причем первый, второй и третий сигнальные входы блока вычисления ошибки нейросетевого предсказания являются соответственно первым, третьим и пятым входами блока адаптации параметров, выходы блока задержки с первого по шестой подключены к одноименным сигнальным входам блока нейросетевой идентификации и блока коррекции весовых коэффициентов, а выходы блока нейросетевой идентификации с первого по третий подключены к одноименным входам блока задержки и одноименным опорным входам блока вычисления ошибки нейросетевого предсказания, четвертый и шестой входы блока задержки соответственно объединены с седьмыми и девятыми сигнальными входами блока нейросетевой идентификации и блока коррекции весовых коэффициентов и соответственно являются четвертым и шестым входами блока адаптации параметров, пятый вход блока задержки объединен с восьмыми сигнальными входами блока нейросетевой идентификации и блока коррекции весовых коэффициентов и входом блока регистрации переходного процесса и является вторым входом блока адаптации параметров, выход блока регистрации переходного процесса соединен со входом разрешения блока коррекции весовых коэффициентов, выход блока вычисления ошибки нейросетевого предсказания подключен к десятому сигнальному входу блока коррекции весовых коэффициентов, выход которого подключен ко входу блока памяти коэффициентов, выход которого подключен ко входу блока вычисления коэффициентов регулятора, входам для подачи весовых коэффициентов блока коррекции весовых коэффициентов и блока нейросетевой идентификации, выходы блока вычисления коэффициентов регулятора с первого по шестой подключены к одноименным входам блока усреднения, пары выходов которого первый и второй, третий и четвертый, пятый и шестой подключены к параметрическим входам для подачи сигналов постоянной времени и коэффициента усиления соответственно интегратора, дифференциатора тока и дифференциатора напряжения операционного блока, причем блок нейросетевой идентификации выполнен в виде многослойного персептрона, блок вычисления ошибки нейросетевого предсказания - в виде вычислителя векторной разности между сигналами на опорных и сигнальных входах, а блок коррекции весовых коэффициентов - в виде процессорного устройства, работающего по алгоритму обратного распространения ошибки обучения.
Достигаемый технический результат заключается в существенном уменьшении величины и длительности переходных процессов, а также повышении скорости их гашения за счет автоматической настройки параметров регулятора при изменении состояния энергосистемы.
Следовательно, устройство удовлетворяет критерию «новизна».
Сравнение с другими техническими решениями показывает, что предлагаемое устройство обладает признаками, позволяющими производить адаптацию параметров операционного блока (регулятора) к параметрам энергосети посредством непрерывного дообучения в процессе функционирования. Операционный блок в каждый момент времени обладает параметрами, близкими к оптимальным с точки зрения величины и длительности переходных процессов, происходящих в энергосистеме.
Изобретение поясняется следующими чертежами, где:
фиг.1 - функциональная схема устройства регулирования возбуждения синхронного генератора;
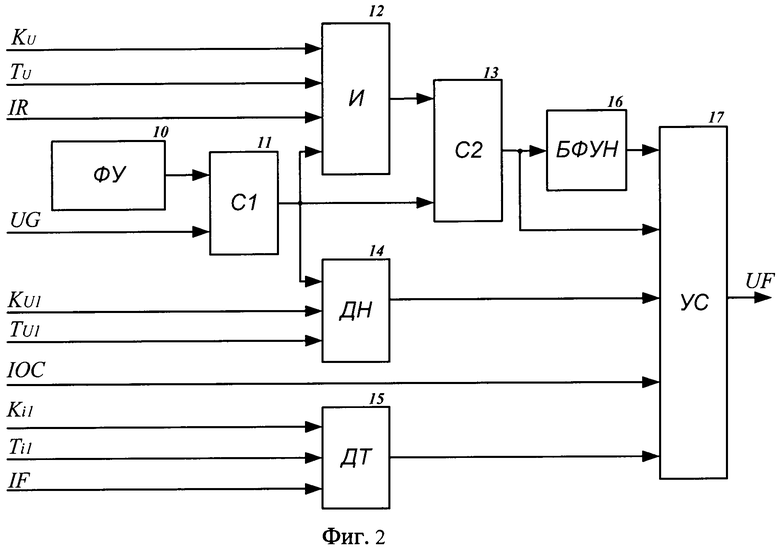
фиг.2 - функциональная схема операционного блока;
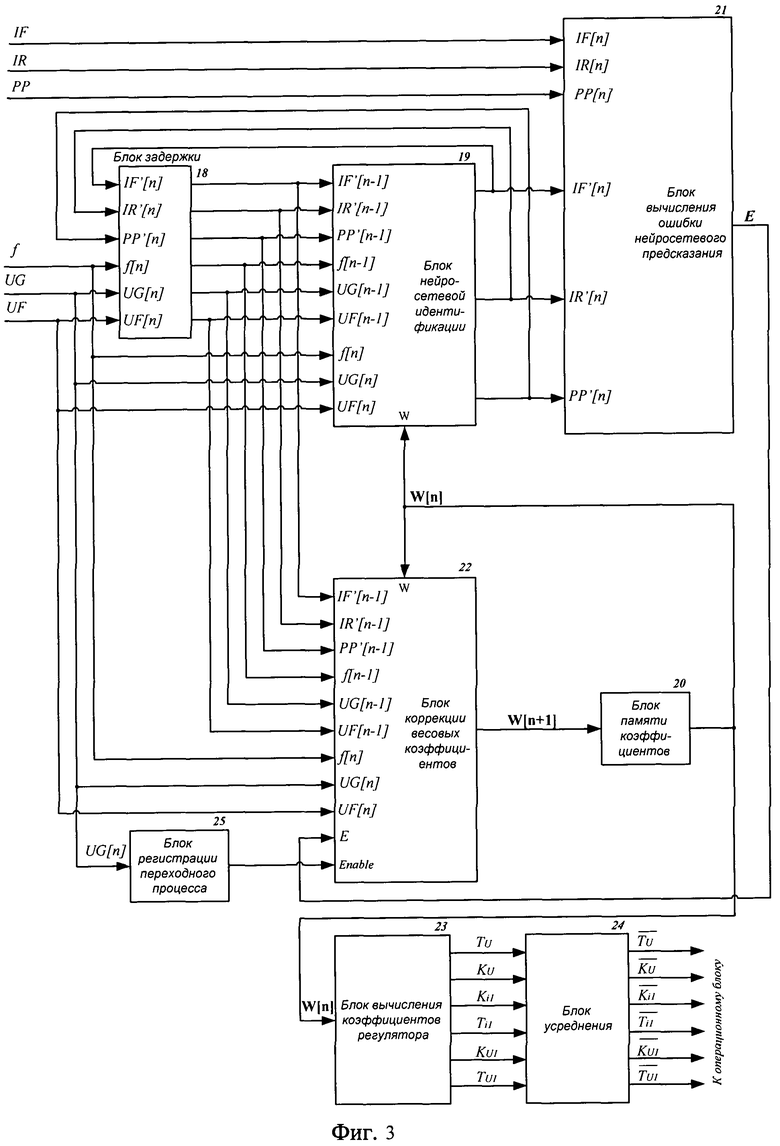
фиг.3 - функциональная схема блока адаптации параметров.
Устройство регулирования возбуждения синхронного генератора (фиг.1) содержит измеритель тока ротора 1 с двумя входами, являющимися входами устройства для подачи тока и напряжения генератора, измеритель тока и напряжения статора 2 со входами, совмещенными с одноименными входами измерителя тока ротора 1, и два выхода, блок обратной связи по току возбуждения 3 со входом, являющимся входом устройства для подачи тока возбуждения генератора, измеритель активной мощности 4 с двумя входами, совмещенными с одноименными входами измерителя тока ротора 1, датчик частоты напряжения генератора 5 со входом, совмещенным со входом устройства для подачи напряжения генератора, блок аналого-цифрового преобразования 6 с пятью входами и пятью выходами, операционный блок 7, блок цифроаналогового преобразования 8 и блок адаптации параметров 9 с шестью входами и шестью выходами, первый вход блока аналого-цифрового преобразования 6 подключен к выходу измерителя тока ротора 1, второй и третий входы - к первому и второму выходам измерителя тока и напряжения статора 2, четвертый вход - к выходу блока обратной связи 3, а пятый вход - к выходу измерителя активной мощности 4, вход блока цифроаналогового преобразования 8 подключен к выходу операционного блока 7, а выход является выходом устройства, причем первый выход блока аналого-цифрового преобразования 6 подключен ко входу дифференциатора тока операционного блока 7 и к первому входу блока адаптации параметров 9, второй выход - ко второму входу первого сумматора операционного блока 7 и ко второму входу блока адаптации параметров 9, третий выход - ко второму входу интегратора операционного блока 7 и к третьему входу блока адаптации параметров 9, четвертый выход - к четвертому входу усилителя-сумматора операционного блока 7, а пятый выход - к пятому входу блока адаптации параметров 9, выход датчика частоты напряжения генератора 5 и выход операционного блока 7 подключены соответственно к четвертому и шестому входам блока адаптации параметров 9, пары выходов блока адаптации параметров 9 первый и второй, третий и четвертый, пятый и шестой подключены к параметрическим входам для подачи сигналов постоянной времени и коэффициента усиления соответственно интегратора, дифференциатора тока и дифференциатора напряжения операционного блока.
Устройство регулирования возбуждения синхронного генератора работает следующим образом.
Измеритель 1 формирует аналоговый сигнал If, пропорциональный току ротора синхронного генератора. На его вход поступают синусоидальные сигналы линейных напряжения и тока статора [2]. Измеритель тока и напряжения статора 2 формирует аналоговые сигналы Uf и IR, соответственно пропорциональные напряжению и реактивной составляющей тока статора синхронного генератора [2]. Блок обратной связи 3 формирует аналоговый сигнал IOC, пропорциональный току возбуждения возбудителя для реализации жесткой обратной связи, а также выполняет функции гальванической развязки цепей возбудителя генератора и устройства [2]. Измеритель активной мощности 4 формирует аналоговый сигнал Р, пропорциональный активной мощности, вырабатываемой генератором. Датчик 5 предназначен для измерения мгновенной частоты напряжения генератора и вырабатывает цифровой сигнал f, пропорциональный указанной величине.
Сигналы с измерителя тока ротора 1, измерителя тока и напряжения статора 2, блока обратной связи по току возбуждения 3 и измерителя активной мощности 4 (соответственно If, Uf, IR, IOC, P) поступают в блок аналого-цифрового преобразования 6, где производится их конвертация в цифровую форму (соответственно в сигналы IF, UG, IR, IOC, PP). Далее цифровые сигналы тока ротора IF, напряжения UG, реактивной составляющей тока статора IR и тока возбуждения возбудителя IOC с выхода блока аналого-цифрового преобразования 6 поступают в операционный блок 7, который осуществляет регулирование по напряжению статора, по изменению первой производной тока ротора и по изменению первой производной напряжения статора генератора с внутренними параметрами регулирования, задаваемыми блоком адаптации параметров 9, а также вырабатывает цифровой сигнал напряжения возбуждения UF, преобразуемый в аналоговую форму блоком цифроаналогового преобразования 8, с выхода которого снимается аналоговый сигнал Uf, подаваемый на возбудитель синхронного генератора.
Цифровые сигналы тока ротора IF, напряжения UG, реактивной составляющей тока статора IR, сигналы активной мощности генератора РР и мгновенной частоты напряжения f, а также выходной сигнал операционного блока 7 (UF) подаются в блок адаптации параметров 9, который на основании их нейросетевой обработки производит вычисление параметров регулирования операционного блока 7: постоянной времени TU и коэффициента усиления КU регулирования по напряжению статора, постоянной времени Ti1 и коэффициента усиления Ki1 регулирования по изменению первой производной тока ротора, постоянной времени TU1 и коэффициента усиления KU1 регулирования по изменению первой производной напряжения статора генератора.
Параметры регулирования операционного блока 7 (TU, KU, Ti1, Ki1, TU1, KU1) непрерывно корректируются исходя из критерия минимума величины и длительности переходных процессов посредством нейросетевой идентификации. Таким образом, операционный блок 7 содержит параметры регулирования, близкие к оптимальным, для текущего состояния энергосистемы и обеспечивает минимальную длительность и величину электромеханических переходных процессов, происходящих в управляемом синхронном генераторе.
Измеритель тока ротора 1 является известным устройством и может быть реализован, например, как датчик тока ротора, описанный в [2], стр.96 и включающий фильтр напряжения, содержащий вход для подачи напряжения генератора, фильтр тока, содержащий вход для подачи тока генератора третий сумматор, последовательно соединенные выпрямитель, нелинейный блок, блок произведения, четвертый сумматор и частотно-зависимый фильтр, выход которого является выходом измерителя тока ротора, причем выход фильтра напряжения подключен к первому входу третьего сумматора, выход которого подключен ко второму входу блока произведения и входу выпрямителя, выход фильтра тока подключен ко второму входу третьего сумматора и второму входу четвертого сумматора.
Измеритель тока и напряжения статора 2 является известным устройством и может быть реализован, например, как измерительный блок, описанный в [2], стр.95, и включающий три синхронных фильтра, сигнальные входы которых объединены со входом для подачи входного напряжения измерителя тока и напряжения статора, фазочувствительный выпрямитель, сигнальный вход которого является входом для подачи входного тока измерителя тока и напряжения статора, три компаратора, сигнальные входы каждого из которых подключены к источникам трех фазных напряжений, опорные входы - к источникам нулевых сигналов, а выходы - к управляющим входам каждого из синхронных фильтров, выходы которых подключены ко входам пятого сумматора, выход которого является выходом измерителя тока и напряжения статора по напряжению, причем выход первого компаратора подключен к управляющему входу фазочувствительного выпрямителя, выход которого является выходом измерителя тока и напряжения статора по току.
Блок обратной связи по току возбуждения 3 является известным устройством и может быть реализован, например, как блок обратной связи, описанный в [2], стр.97, и включающий генератор и последовательно соединенные модулятор, сигнальный вход которого является входом блока обратной связи по току возбуждения, усилитель, демодулятор и фильтр, выход которого является выходом блока обратной связи по току возбуждения, выход генератора подсоединен к опорным входам модулятора и демодулятора.
Измеритель активной мощности 4 является известным устройством и может быть реализован, например, как устройство, содержащее последовательно соединенные векторный умножитель, первый вход которого является входом измерителя активной мощности для подачи тока генератора, второй вход которого является входом измерителя активной мощности для подачи напряжения генератора, и интегратор, выход которого является выходом измерителя активной мощности.
Измеритель частоты напряжения генератора 5 является известным устройством и может состоять, например, из фазовращателя на 90 градусов, вход которого является входом измерителя частоты напряжения и совмещен со входом первого дифференциатора и вторым входом второго умножителя, выход которого подключен к первому входу первого умножителя, выход которого соединен с инвертирующим входом сумматора, причем выход фазовращателя подключен ко второму входу первого умножителя и входу второго дифференциатора, выход которого подключен к первому входу второго умножителя, выход которого подсоединен к неинвертирующему входу сумматора, выход которого является выходом измерителя частоты напряжения.
Блок цифроаналогового преобразования 8 является известным устройством.
Блок аналого-цифрового преобразования 6 включает пять идентичных аналого-цифровых преобразователей, являющихся известными устройствами и работающих параллельно с одинаковой частотой дискретизации, вход Q-го аналого-цифрового преобразователя является Q-м входом, а выход - Q-м выходом блока аналого-цифрового преобразования.
Операционный блок устройства (фиг.2) выполнен цифровым и предназначен для выработки сигнала управления возбуждением синхронного генератора посредством обработки сигналов, поступающих с измерителя тока ротора 1, измерителя тока и напряжения статора 2, блока обратной связи 3 с использованием параметров, определяемых блоком 9, и состоит из формирователя уставки 10, первого сумматора 11, содержащего первый и второй входы, интегратора 12, содержащего первый и второй сигнальные и первый и второй параметрические входы, второго сумматора 13, содержащего первый и второй входы, дифференциатора напряжения 14 и дифференциатора тока 15, содержащих сигнальный и первый и второй параметрический входы каждый, блока форсировки 16 и усилителя-сумматора 17, содержащего входы с первого по пятый, сигнальный вход дифференциатора тока 15 является первым входом операционного блока 7, формирователь уставки 10 подключен к первому входу первого сумматора 11, второй вход которого является вторым входом операционного блока 7, а выход первого сумматора 11 соединен с первым сигнальным входом интегратора 12, первым входом второго сумматора 13 и сигнальным входом дифференциатора напряжения 14, второй сигнальный вход интегратора 12 является третьим входом операционного блока 7, а выход интегратора 12 соединен со вторым входом второго сумматора 13, выход которого соединен со входом блока форсировки 16 и с первым входом усилителя-сумматора 17, выходы блоков: форсировки 16, дифференциатора напряжения 14 и дифференциатора тока 15 соответственно соединены со вторым, третьим и четвертым входами усилителя-сумматора 17, пятый вход усилителя-сумматора 17 является четвертым входом, первый и второй параметрические входы интегратора 12 соответственно являются шестым и пятым, первый и второй параметрические входы дифференциатора тока 15 - соответственно седьмым и восьмым, первый и второй параметрические входы дифференциатора напряжения 14 - соответственно девятым и десятым входами операционного блока 7, а выход усилителя-сумматора - выходом операционного блока 7.
Операционный блок 7 (фиг.2) работает следующим образом. На вход блока поступают цифровые сигналы тока ротора IF, напряжения UG, реактивной составляющей тока статора IR и тока возбуждения возбудителя IOC, формируемые блоком аналого-цифрового преобразования 6. Формирователь уставки 10 вырабатывает уставку напряжения статора генератора. Первый сумматор 11 осуществляет алгебраическое сложение сигнала уставки с сигналом напряжения статора UG [2]. На выходе сумматора формируется напряжение, пропорциональное отклонению напряжения генератора UG от уставки, которое затем подается на группу устройств, состоящую из второго сумматора 13, интегратора 12 и дифференциатора напряжения 14, реализующую стандартный широко известный ПИД-регулятор по отклонению напряжения и по изменению первой производной напряжения статора [2].
Регулирование по изменению первой производной тока ротора производится посредством дифференциатора тока 15. Блок форсировки 16 предназначен для выработки напряжения возбуждения при авариях в энергосистеме, вызывающих снижение напряжение на шинах генератора [2]. При уменьшении напряжения статора UG генератора относительно установленного значения блок форсировки 16 выдает сигнал форсирования независимо от других каналов. Усилитель-сумматор 17 выполняет функцию формирования суммарного канала регулирования и масштабного усиления сигнала возбуждения UF.
Интегратор 12, дифференциаторы: напряжения 14 тока 15 (в отличие от одноименных узлов схожего назначения у прототипа) обладают перестраиваемыми параметрами регулирования - коэффициентами усиления и постоянными времени, соответственно (TU, KU) - для интегратора 12, (Ti1, Ki1) - для дифференциатора тока 15, (TU1, KU1) - для дифференциатора напряжения 14. Параметры регулирования вырабатываются в блоке адаптации параметров 9 (фиг.1).
Формирователь уставки 10, первый сумматор 11, второй сумматор 13, блок форсировки 16 и усилитель-сумматор 17 являются стандартными устройствами и могут быть выполнены по аналогии с одноименными устройствами, описанными в
[2], стр.97, 98, и выполняющими схожие функции.
Интегратор 12 является стандартным радиотехническим звеном - фильтром с управляемыми коэффициентами и может быть реализован, например, в виде рекурсивного цифрового фильтра с уравнением yU[n]=a 1(xU[n]+xU[n-1])-b1yU[n-1], где xU[n], yU[n] - входной и выходной сигналы фильтра на n-м шаге; TS - период дискретизации сигналов; a 1, b1 - коэффициенты фильтра, рассчитываемые по формулам: a 1=KUTS/(TS+2TU); b1=(TS-2TU)/(TS+2TU) в зависимости от параметров регулирования, которые вырабатываются в блоке адаптации параметров 9; Ts - период дискретизации величин.
Дифференциаторы: напряжения 14 тока 15 выполнены аналогично, являются стандартными цифровыми радиотехническими устройствами - фильтрами с управляемыми коэффициентами и могут быть реализованы, например, в виде рекурсивных цифровых фильтров с уравнением: yI1, U1[n]=a 02(xI1, U1[n]-xI1, U1[n-1])-b12yI1, U1[n-1], где xI1, U1[n], yI1, U1[n] - входной и выходной сигналы фильтра на n-м шаге; a 02=(2KI1, U1TS)/(TS+2TI1, U1), b12=(TS-2TI1, U1)/(TS+2TI1, U1) - коэффициенты фильтра, вычисляемые в зависимости от параметров регулирования, которые вырабатываются в блоке адаптации параметров 9.
Блок адаптации параметров 9 (фиг.3) состоит из блока задержки 18, содержащего входы и выходы с первого по шестой, блока нейросетевой идентификации 19, содержащего сигнальные входы с первого по девятый и вход для подачи весовых коэффициентов, выходы с первого по третий, блока памяти коэффициентов 20, блока вычисления ошибки нейросетевого предсказания 21, содержащего опорные входы с первого по третий и сигнальные входы с первого по третий, блока коррекции весовых коэффициентов 22, содержащего сигнальные входы с первого по десятый, вход для подачи весовых коэффициентов и вход разрешения, блока вычисления коэффициентов регулятора 23, содержащего выходы с первого по шестой, блока усреднения 24, содержащего входы и выходы с первого по шестой, и блока регистрации переходного процесса 25, сигнальные первый, второй и третий входы блока вычисления ошибки нейросетевого предсказания 21 являются соответственно первым, третьим и пятым входами блока адаптации параметров 9, выходы блока задержки 18 с первого по шестой соединены с одноименными сигнальными входами блока нейросетевой идентификации 19 и блока коррекции весовых коэффициентов 22, а выходы блока нейросетевой идентификации 19 с первого по третий соединены с одноименными входами блока задержки 18 и одноименными опорными входами блока вычисления ошибки нейросетевого предсказания 21, четвертый и шестой входы блока задержки 18 соответственно объединены с седьмыми и девятыми сигнальными входами блока нейросетевой идентификации 19 и блока коррекции весовых коэффициентов 22 и соответственно являются четвертым и шестым входами блока адаптации параметров 9, пятый вход блока задержки 18 объединен с восьмыми сигнальными входами блока нейросетевой идентификации 19 и блока коррекции весовых коэффициентов 22, входом блока регистрации переходного процесса 25 и является вторым входом блока адаптации параметров 9, выход блока регистрации переходного процесса 25 соединен со входом разрешения блока коррекции весовых коэффициентов 22, выход блока вычисления ошибки нейросетевого предсказания 21 подсоединен к десятому сигнальному входу блока коррекции весовых коэффициентов 22, выход которого подсоединен ко входу блока памяти коэффициентов 20, выход которого соединен со входом блока вычисления коэффициентов регулятора 23, входом для подачи весовых коэффициентов блока коррекции весовых коэффициентов 22 и входом для подачи весовых коэффициентов блока нейросетевой идентификации 19, выходы блока вычисления коэффициентов 23 регулятора с первого по шестой подключены к одноименным входам блока усреднения 24, выходы которого с первого по шестой являются одноименными выходами блока адаптации параметров 9.
Блок адаптации параметров 9 работает по принципу нейросетевой идентификации следующим образом. Блок нейросетевой идентификации 19, блок задержки 18, блок вычисления ошибки нейросетевого предсказания 21, блок коррекции весовых коэффициентов 22 и блок памяти коэффициентов 20 образуют систему нейросетевой идентификации для управления динамическим объектом с внешними входами, описанную в [3], стр.108-110. Блок нейросетевой идентификации 19 совместно с блоком задержки 18 при этом являются параметрической моделью динамического объекта, включающего синхронный генератор, первичный двигатель, систему возбуждения и энергосеть. Параметрами модели являются весовые коэффициенты нейросети W[n].
Последовательность операций в блоке адаптации параметров 9 следующая (фиг.3).
На входы блока адаптации параметров 9 подаются следующие данные:
на первый - дискретный отсчет сигнала оценки тока ротора генератора IF'[n];
на третий - дискретный отсчет сигнала оценки реактивной составляющей тока статора IR'[n];
на пятый - задержанный дискретный отсчет сигнала оценки активной мощности генератора PP'[n];
на четвертый - дискретный отсчет сигнала частоты напряжения генератора f=f[n];
на второй - дискретный отсчет сигнала напряжения статора UG-UG[n]; на шестой - дискретный отсчет сигнала напряжения возбуждения генератора UF=UF[n], n - номер такта.
На сигнальные входы блока нейросетевой идентификации 19 подаются входные цифровые сигналы, образующие входной вектор нейросети X, причем
X={IF'[n-1], IR'[n-1], PP'[n-1], f[n-1], UG[n-1], UF[n-1], f[n], UG[n], UF[n]}, где
IF'[n-1] - задержанный дискретный отсчет сигнала оценки тока ротора генератора с первого выхода блока задержки 18;
IR'[n-1] - задержанный дискретный отсчет сигнала оценки реактивной составляющей тока статора со второго выхода блока задержки 18;
РР'[n-1] - задержанный дискретный отсчет сигнала оценки активной мощности генератора с третьего выхода блока задержки 18;
f=f[n-1] - задержанный дискретный отсчет сигнала частоты напряжения генератора с четвертого выхода блока задержки 18;
UG=UG[n-1] - задержанный дискретный отсчет сигнала напряжения статора с пятого выхода блока задержки 18;
UF=UF[n-1] - задержанный дискретный отсчет сигнала напряжения возбуждения генератора, с шестого выхода блока задержки 18.
Блок нейросетевой идентификации 19 производит непрерывное вычисление дискретных отсчетов сигналов: оценки тока ротора генератора IF'=IF'[n] - на первом выходе, реактивной составляющей тока статора IR'=IR'[n] - на втором выходе и активной мощности генератора РР'=PP'[n] - на третьем выходе блока, по величине приближенным к сигналам генератора: тока ротора IF, реактивной составляющей тока статора IR и оценки активной мощности РР посредством расчета отклика многослойной нейросети с весовыми коэффициентами W[n], извлекаемыми из блока памяти весовых коэффициентов 20.
Блок 18 служит для задержки входных данных, поступающих на сигнальные входы блока нейросетевой идентификации с первого по шестой на один такт частоты дискретизации.
Выходные сигналы блока нейросетевой идентификации 19 (IF'[n], IR'[n], РР'[n]) - в блоке вычисления ошибки нейросетевого предсказания 21 сравниваются с действующими величинами выходных сигналов генератора (соответственно IF=IF[n] - на первом сигнальном входе, IR=IR[n] - на втором сигнальном входе и РР=РР[n] - на третьем сигнальном входе блока вычисления ошибки нейросетевого предсказания 21), на выходе которого формируется вектор ошибки E (несовпадения) последних с входными сигналами, вычисленными нейросетью в блоке 19 и подаваемыми на опорные входы блока вычисления ошибки нейросетевого предсказания 21: IF'[n]- на первый, IR[n] - на второй и РР'[n] - на третий.
Вектор ошибки E далее поступает в блок коррекции весовых коэффициентов 22, в который одновременно подаются весовые коэффициенты W[n], хранящиеся в блоке 20, и входной вектор нейросети X.
При регистрации начала переходного процесса напряжения генератора блоком 25 на выходе последнего формируется логический сигнал Enable, предназначенный для разрешения и запуска операций по коррекции весовых коэффициентов в одноименном блоке 22. После прекращения переходного процесса сигнал Enable снимается.
Блок коррекции весовых коэффициентов 22 при наличии сигнала Enable на входе разрешения изменяет значения весовых коэффициентов W[n] в сторону уменьшения величины вектора ошибки Е пропорционально его абсолютной величине посредством заложенных в него линейных вычислительных операций, являющихся алгоритмом обучения нейросети. После чего вновь вычисленные весовые коэффициенты W[n+1] подаются в блок памяти коэффициентов 20 и на следующей итерации будут использоваться для расчета величин IF'[n+1], IR'[n+1] и РР'[n+1] блоком нейросетевой идентификации 19. Далее процесс непрерывно повторяется для последующих отсчетов входных сигналов IF, IR и PP. При величине вектора ошибки E, близкой к нулю, и при отсутствии переходного процесса на шинах генератора значения весовых коэффициентов нейросети W[n] остаются постоянными.
Блок вычисления коэффициентов регулятора 23 для каждого набора поступающих на его вход весовых коэффициентов W[n] выбирает заранее рассчитанные параметры регулирования (TU, KU, Ti1, Ki1, TU1, KU1), близкие к оптимальным и обеспечивающие минимальную величину и длительность переходных процессов.
Блок усреднения 24 предназначен для подавления шума и резких изменений параметров регулирования (TU, KU, Ti1, Ki1, TU1, KU1) посредством интегрирования каждого из них. С выхода блока снимаются усредненные значения параметров регулирования ( ,
,  ,
,  ,
,  ,
,  ,
,  ), которые далее подаются на вход блока адаптации параметров 9.
), которые далее подаются на вход блока адаптации параметров 9.
Блок задержки 18 состоит из набора шести идентичных цифровых регистров, являющихся известными устройствами.
Блок нейросетевой идентификации 19 является многослойным персептроном - общеизвестным устройством, описанным в [3], стр.26 с количеством слоев не менее трех.
Блок вычисления ошибки нейросетевого предсказания 21 производит покомпонентное вычитание сигналов на сигнальных входах (IF[n], IR[n] и РР[n]) из сигналов на опорных входах (IF[n], IR'[n] и РР[n]) и может быть реализован в виде известного устройства - векторного вычитателя. Вектор ошибки на выходе устройства Е={IF'[n]-IF[n]; IR'[n]-IR[n]; РР'[n]-PP[n]}.
Блок коррекции весовых коэффициентов может быть реализован в виде процессора, работающего по общеизвестному алгоритму обратного распространения ошибки обучения, приведенному в [2], стр.32, и в принятых терминах и обозначениях настоящего описания, может быть реализован следующим образом.
Шаг 1. Присвоить начальные случайные значения величинам  ,
,  , причем
, причем  где -
где -  ,
,  - весовые коэффициенты первого, …, M-1-го (скрытого) и M-го (выходного) слоя многослойного персептрона соответственно; k=1, …, NM, j=1, …, NM-1, i=1, …, NM-2, p=1, …, N1, q=1, …, N; NM - количество нейронов в M-м слое, N - количество входов нейросети; M - количество слоев нейросети.
- весовые коэффициенты первого, …, M-1-го (скрытого) и M-го (выходного) слоя многослойного персептрона соответственно; k=1, …, NM, j=1, …, NM-1, i=1, …, NM-2, p=1, …, N1, q=1, …, N; NM - количество нейронов в M-м слое, N - количество входов нейросети; M - количество слоев нейросети.
Шаг 2. Вычислить отклики скрытых слоев нейросети с первого по M-1-й:

и величину коррекции весовых коэффициентов выходного слоя нейросети:  , где Ek - компонент вектора ошибки нейросетевого предсказания E;
, где Ek - компонент вектора ошибки нейросетевого предсказания E;  - k-й компонент M-го (выходного) вектора нейросети; F(x)=1/(1+exp(-x)) - активационная функция нейросети, одинаковая для всех нейронов M слоев; Xq - элементы входного вектора нейросети X.
- k-й компонент M-го (выходного) вектора нейросети; F(x)=1/(1+exp(-x)) - активационная функция нейросети, одинаковая для всех нейронов M слоев; Xq - элементы входного вектора нейросети X.
Шаг 3. Вычислить величины коррекции коэффициентов M-го слоя нейросети:  и откорректировать весовые коэффициенты выходного слоя нейросети:
и откорректировать весовые коэффициенты выходного слоя нейросети:  , где η<1 - коэффициент скорости обучения; η<1 - фильтрующий коэффициент; n - номер итерации.
, где η<1 - коэффициент скорости обучения; η<1 - фильтрующий коэффициент; n - номер итерации.
Шаг 4. Вычислить коэффициент коррекции весовых коэффициентов М-1-го (скрытого) слоя нейросети в соответствии с формулой:

Шаг 5. Вычислить величины коррекции:

и откорректировать весовые коэффициенты М-1-го (скрытого) слоя нейросети в соответствии с формулой:

Далее шаги 4 и 5 повторить для всех оставшихся слоев нейросети с первого по M-2-й, используя рекуррентные формулы (1)-(3) и учитывая, что  .
.
Шаг 6. Перейти к шагу 2 для следующего, n+1-го вектора входных данных.
Блок вычисления коэффициентов регулятора 23 может быть реализован, например, в виде постоянного запоминающего устройства, на входы адреса которого подаются значения коэффициентов нейрости W[n], а с выхода данных - параметры регулирования (TU, KU, Ti1, Ki1, TU1, KU1), которые рассчитаны заранее.
Блок усреднения 24 может быть реализован из набора шести идентичных цифровых интеграторов, являющихся общеизвестными устройствами, причем входы блока усреднения с первого по шестой являются входами, а выходы - выходами каждого из интеграторов.
Блок регистрации переходного процесса может быть реализован, например, в виде последовательно соединенных дифференциатора, вход которого является входом блока, устройства вычисления модуля и компаратора, выход которого является выходом блока, а опорный вход которого соединен с источником опорной величины. Источник опорной величины формирует постоянный положительный сигнал, величина которого определяет чувствительность блока. Блок работает следующим образом. При возникновении переходного процесса производная напряжения статора генератора, вычисленная дифференциатором, станет отлична от нуля и на выходе устройства вычисления модуля примет положительную величину, которая поступает на компаратор, служащий для выработки выходного сигнала разрешения Enable и фильтрации медленных флуктуации напряжения статора, не являющихся переходными процессами.
При изменении параметров энергосистемы, например напряжения или импеданса энергосети, что имеет место при подключении новых или отключении действующих потребителей, коротких замыканиях, перенапряжениях и других возмущениях, величина вектора ошибки Е станет отличной от нуля вследствие того, что при действующих параметрах нейросети - весовых коэффициентах W[n] изменятся параметры моделируемой ею энергосистемы. Расхождение оценочных сигналов нейросетевой модели и действующих сигналов, снимаемых с генератора, будет скомпенсировано согласно изложенной последовательности операций.
Таким образом, для каждого текущего состояния энергосистемы могут быть определены весовые коэффициенты W[n], содержащие информацию о состоянии энергосистемы, для которой рассчитываются параметры регулирования (TU, KU, Ti1, Ki1, TU1, KU1), близкие к оптимальным и обеспечивающие минимальную величину и длительность переходных процессов в энергосистеме.
Процесс коррекции весовых коэффициентов (обучение) многослойного персептрона в блоке нейросетевой идентификации 19 и, следовательно, происходит только во время действия даже незначительных по величине переходных процессов, по сигналу Enable. Коррекция весовых коэффициентов при этом производится на малые величины, пропорциональные скорости обучения 77, в результате чего происходит постепенное итеративное уточнение коэффициентов регулятора, отслеживающее медленные изменения параметров энергосистемы.
Следовательно, в предлагаемом устройстве производится адаптация параметров операционного блока (регулятора) к параметрам энергосети в процессе функционирования, и последний в каждый момент времени обладает параметрами, близкими к оптимальным с точки зрения величины и длительности переходных процессов, происходящих в энергосистеме. За счет этого достигается существенное уменьшение величины и длительности переходных процессов, а также повышение скорости их гашения при изменении состояния энергосистемы.
В представленной реализации устройства регулирования возбуждения синхронного генератора блок нейросетевой идентификации 19 является трехслойным персептроном с количеством нейронов в первом слое - 50, во втором слое - 50, в третьем (выходном) слое - 9, наблюдается сокращение величины и длительности переходного процесса при изменении напряжения сети в виде ступенчатой функции более чем в 2 раза.
Источники информации
1. Патент РФ №65317 от 20.03.2007 «Регулятор возбуждения синхронного генератора».
2. Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов. - СПб.: Наука, 1996. - 138 с.
3. Сигеру Омату, Марзуки Халид, Рубия Юсоф. Нейроуправление и его приложения. Кн.2. Пер. с англ. / Под ред. А.И.Галушкина. В.А.Птичкина. - М.: ИПРЖР, 2000. - 272 с. (Нейрокомпьютеры и их применение).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498494C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2230338C2 |
| СПОСОБ НАСТРОЙКИ ПАРАМЕТРОВ РЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498495C1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2368909C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕМЕННОГО ТОКА ПРОМЫШЛЕННОЙ ЧАСТОТЫ | 2008 |
|
RU2368910C1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Регулятор возбуждения для синхронного генератора | 1980 |
|
SU991573A1 |
| Способ регулирования тока возбуждения синхронной машины | 1987 |
|
SU1534743A1 |
| Устройство для формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины | 1987 |
|
SU1510062A1 |
Изобретение относится к области электротехники и может быть использовано в составе оборудования для управления синхронными генераторами на предприятиях, вырабатывающих электрическую энергию. Технический результат заключается в существенном уменьшении величины и длительности переходных процессов, а также повышении скорости их гашения за счет автоматической настройки параметров регулятора при изменении состояния энергосистемы. Устройство регулирования возбуждения синхронного генератора содержит измеритель тока ротора, измеритель тока и напряжения статора, блок обратной связи по току возбуждения, измеритель активной мощности, датчик частоты напряжения генератора, блок аналого-цифрового преобразования, операционный блок, блок цифроаналогового преобразования и блок адаптации параметров. Операционный блок и блок адаптации параметров выполнены так, как указано в материалах заявки. 3 ил.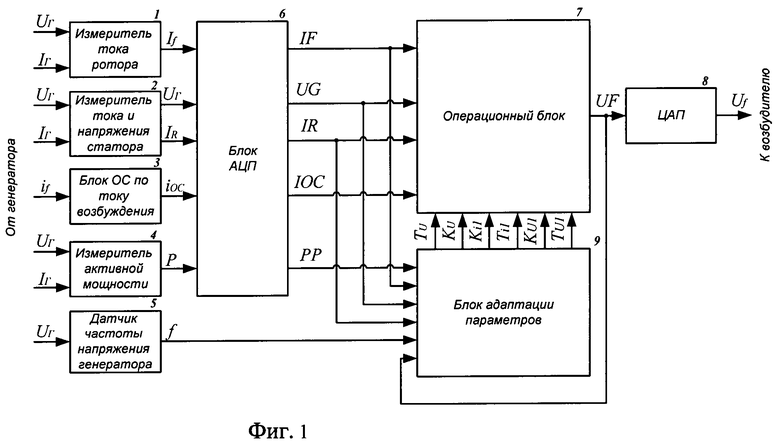
Устройство регулирования возбуждения синхронного генератора, содержащее измеритель тока ротора с двумя входами для подачи тока и напряжения генератора, измеритель тока и напряжения статора с входами, совмещенными с одноименными входами измерителя тока ротора, блок обратной связи по току возбуждения и операционный блок, включающий формирователь уставки, выход которого подключен к первому входу первого сумматора, второй вход которого служит для подачи сигнала по напряжению измерителя тока и напряжения статора, выход указанного сумматора подключен к первому входу интегратора, первому входу второго сумматора и ко входу дифференциатора напряжения, причем второй вход интегратора служит для подачи сигнала по току измерителя тока и напряжения статора, выход интегратора подключен ко второму входу второго сумматора, выход которого подключен ко входу блока форсировки управляющего напряжения, выход данного блока подключен к первому входу усилителя-сумматора, ко второму и третьему входам которого подключены соответственно выходы второго сумматора и дифференциатора напряжения, четвертый вход усилителя-сумматора служит для подачи сигнала с выхода блока обратной связи по току возбуждения, к пятому входу - выход дифференциатора тока, вход которого служит для подачи сигнала измерителя тока ротора в операционный блок, а выход усилителя-сумматора является выходом операционного блока, отличающееся тем, что элементы операционного блока выполнены цифровыми, интегратор, дифференциатор тока и дифференциатор напряжения операционного блока дополнительно содержат каждый по два параметрических входа для подачи сигналов постоянной времени и коэффициента усиления, а устройство регулирования дополнительно содержит измеритель активной мощности, включающий два входа для подачи тока и напряжения, совмещенные с одноименными входами измерителя тока ротора, датчик частоты напряжения генератора, блок аналого-цифрового преобразования, входы которого подключены к выходам измерителя тока ротора, измерителя тока и напряжения статора, блока обратной связи и измерителя активной мощности, блок цифроаналогового преобразования, вход которого подключен к выходу операционного блока, а выход является выходом устройства, и блок адаптации параметров с шестью входами, причем первый выход блока аналого-цифрового преобразования подключен ко входу дифференциатора тока операционного блока и к первому входу блока адаптации параметров, второй выход - ко второму входу первого сумматора операционного блока и ко второму входу блока адаптации параметров, третий выход - ко второму входу интегратора операционного блока и к третьему входу блока адаптации параметров, четвертый выход - к четвертому входу усилителя-сумматора операционного блока, а пятый выход - к пятому входу блока адаптации параметров, выход датчика частоты напряжения генератора и выход операционного блока подключены соответственно к четвертому и шестому входам блока адаптации параметров, причем блок адаптации параметров выполнен в виде блока задержки с шестью входами и шестью выходами, блока нейросетевой идентификации с девятью сигнальными входами и входом для подачи весовых коэффициентов и с тремя выходами, блока памяти коэффициентов, блока вычисления ошибки нейросетевого предсказания с тремя опорными входами и тремя сигнальными входами, блока коррекции весовых коэффициентов с десятью сигнальными входами, входом для подачи весовых коэффициентов и входом разрешения, блока вычисления коэффициентов регулятора с шестью выходами, блока усреднения с шестью входами и шестью выходами и блока регистрации переходного процесса, причем первый, второй и третий сигнальные входы блока вычисления ошибки нейросетевого предсказания являются соответственно первым, третьим и пятым входами блока адаптации параметров, выходы блока задержки с первого по шестой подключены к одноименным сигнальным входам блока нейросетевой идентификации и блока коррекции весовых коэффициентов, а выходы блока нейросетевой идентификации с первого по третий подключены к одноименным входам блока задержки и одноименным опорным входам блока вычисления ошибки нейросетевого предсказания, четвертый и шестой входы блока задержки соответственно объединены с седьмыми и девятыми сигнальными входами блока нейросетевой идентификации и блока коррекции весовых коэффициентов и соответственно являются четвертым и шестым входами блока адаптации параметров, пятый вход блока задержки объединен с восьмыми сигнальными входами блока нейросетевой идентификации и блока коррекции весовых коэффициентов и входом блока регистрации переходного процесса и является вторым входом блока адаптации параметров, выход блока регистрации переходного процесса соединен со входом разрешения блока коррекции весовых коэффициентов, выход блока вычисления ошибки нейросетевого предсказания подключен к десятому сигнальному входу блока коррекции весовых коэффициентов, выход которого подключен ко входу блока памяти коэффициентов, выход которого подключен ко входу блока вычисления коэффициентов регулятора, входам для подачи весовых коэффициентов блока коррекции весовых коэффициентов и блока нейросетевой идентификации, выходы блока вычисления коэффициентов регулятора с первого по шестой подключены к одноименным входам блока усреднения, пары выходов которого первый и второй, третий и четвертый, пятый и шестой подключены к параметрическим входам для подачи сигналов постоянной времени и коэффициента усиления соответственно интегратора, дифференциатора тока и дифференциатора напряжения операционного блока, причем блок нейросетевой идентификации выполнен в виде многослойного персептрона, блок вычисления ошибки нейросетевого предсказания - в виде вычислителя векторной разности между сигналами на опорных и сигнальных входах, а блок коррекции весовых коэффициентов - в виде процессорного устройства, работающего по алгоритму обратного распространения ошибки обучения.
| Способ приготовления катализаторов для синтеза аммиака | 1944 |
|
SU65317A1 |
| Способ получения никотиновой кислоты | 1948 |
|
SU75519A1 |
| Способ газового отопления котлов | 1931 |
|
SU25663A1 |
| Автоматический регулятор возбуждения для синхронных машин | 1983 |
|
SU1171950A1 |
| US 201000201329 A1, 12.08.2010 | |||
| JP 2001268996 A, 28.09.2001 | |||
| Способ реконструкции причального сооружения | 1985 |
|
SU1317058A1 |

