1
Изобретение относится к области автоматических и счетно-решающих устройств.
Известны бесконтактные синусно-косинусные вращающиеся трансформаторы, состоящие из двух электрических машин с различным числом пар полюсов, каждая из которых имеет пакеты статора и ротора с обмотками. На одвом статоре расположена входная обмотка, а на другом - выходная обмотка. Роторные обмотки включены друг на друга.
Для повышения точности прео,бразования в предлагаемом трансформаторе обмотки ротора содержат / пар отдельных квадратурных обмоток, где .
Оси пар обмоток на каждом роторе сдвинуты одна относительно другой на одинаковые геометрические углы.
Ось одной пары 0 бмоток одного ротора параллельна оси соединенной с ней пары обмоток другого ротора, а последующие пары обмоток одного ротора, оси которых сдвинуты относительно оси первой пары обмоток того же ротора на соответствующий геометрический угол, соединены с парами обмоток другого ротора, оси которых сдвинуты относительно оси первой пары того же ротора на противоположный геометрический угол.
Такое выполнение трансформатора позволяет получить многополюсное преобразование.
Для двухполюсного преобразования оси пар обмоток одного ротора параллельны осям соединенных с вими пар обмоток другого ротора.
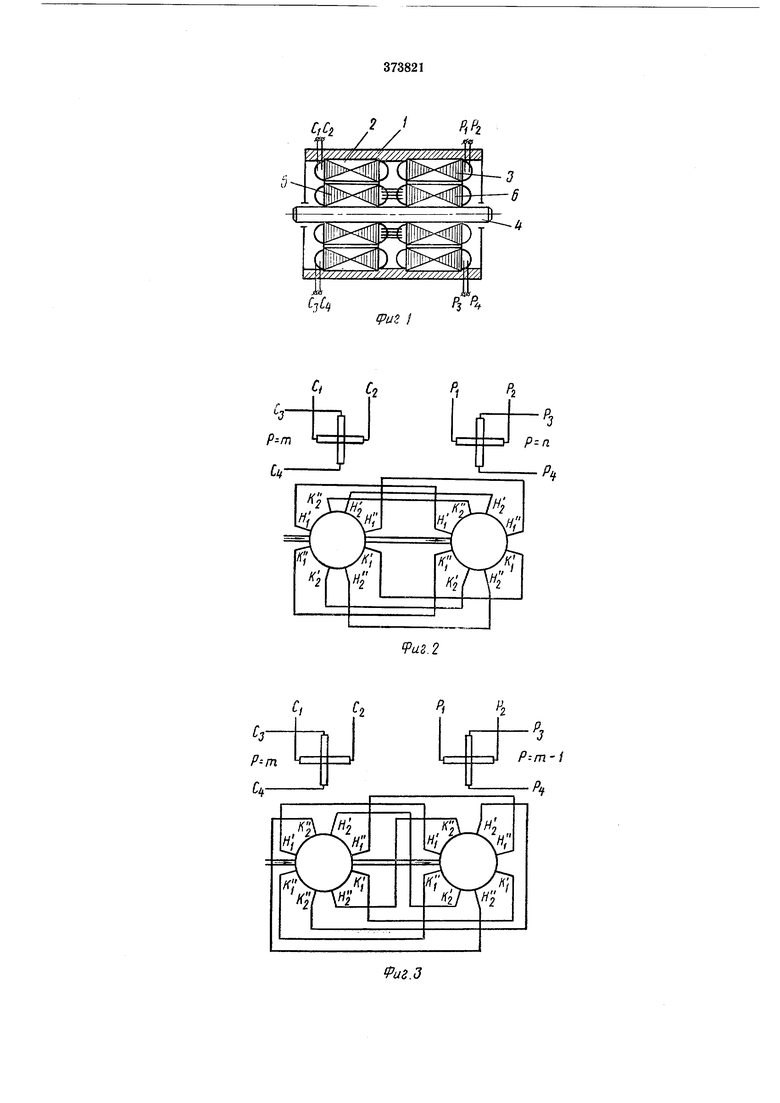
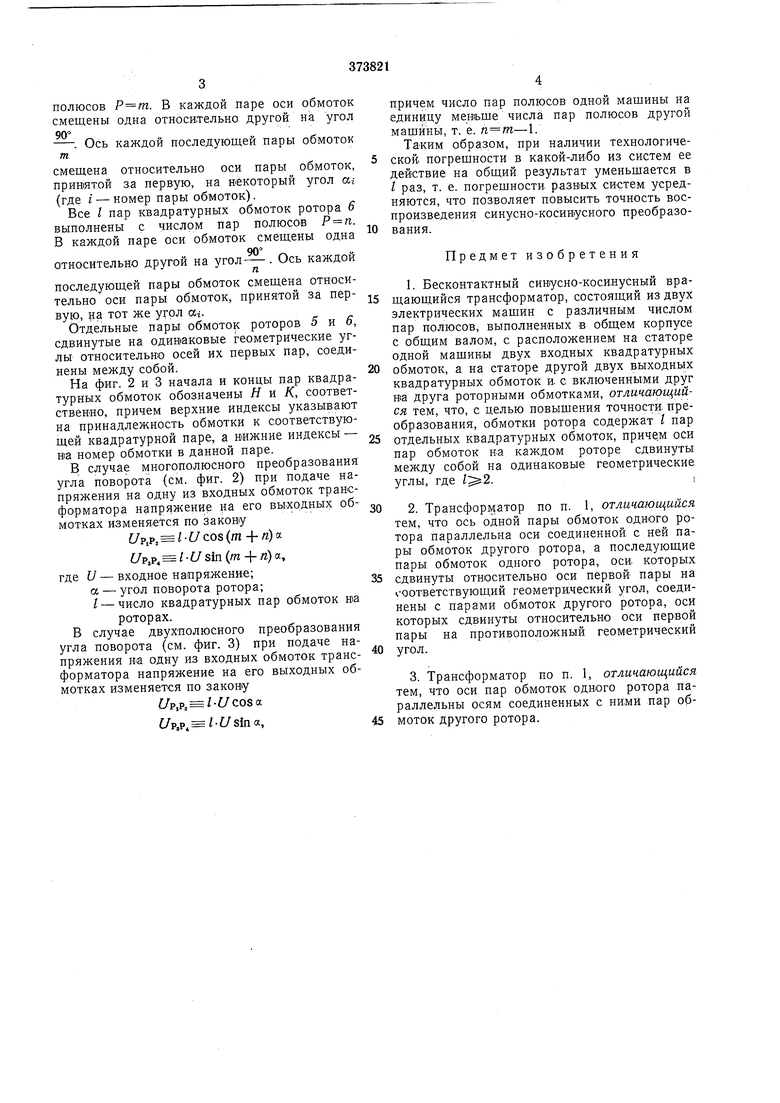
На фиг. 1 показан предлагаемый трансформатор, продольный разрез; на фиг. 2 - принципиальная электрическая схема включения обмоток роторов для многополюсного преобразования угла поворота в напряжение; на фиг. 3- то же, для двухполюсного преобразования угла поворота в напряжение.
Трансформатор имеет корпус /, в котором закреплены два статора 2 и 5 и вал 4 с роторами 5 и 5. На статоре 2 расположены две входные квадратурные обмотки с выводами Cj, €2 и Сз, С с числом пар полюсов Р т, где т может быть произвольным числом. Оси этих обмоток смещены одна относительно
90°
Другой на угол. На статоре 3 расположет
ВЫ две выходные квадратурные обмотки с выводами PI, PZ и РЗ, P с числом пар полюсов Р п, где п может быть произвольным числом. Оси этих обмоток смещены одна относи90
тельно другой на угол .
На роторе 5 размещены / пар квадратурных одинаковых обмоток (где , 3, 4 ...). Все обмотки ротора выполнены с числом пар полюсов . В каждой паре оси обмоток смещены одна относительно другой на угол 90°„„ . Ось каждой последующей пары обмоток смещена относительно оси пары обмоток, принятой за первую, на некоторый угол ссг (где i - номер пары обмоток). Все I пар квадратурных обмоток ротора 6 выполнены с числом пар полюсов Р п. В каладой паре оси обмоток смещены одна относительно другой на угол. Ось каждой последующей пары обмоток смещена относительно оси пары обмоток, принятой за первую, а тот же угол а,Отдельные пары обмоток роторов 5 и 5, сдвинутые на одиваковые геометрические углы относительно осей их первых пар, соединены между собой. На фиг. 2 и 3 начала и концы пар квадратурных обмоток обозначены Я и /С, соответственно, причем верхние индексы указывают на принадлежность обмотки к соответствующей квадратурной паре, а нижние индексы - на номер обмотки в данной паре. В случае многополюсного преобразования угла поворота (см. фиг. 2) при подаче напряжения на одну из входных обмоток трансформатора напряжение на его выходных обмотках изменяется по закону С/р,р, / -f/ cos (т + «) а f/pjp /-f/ sin (т п} а, где и - входное напряжение; а - угол поворота ротора; / - число квадратурных пар обмоток на роторах. В случае двухполюсного преобразования угла поворота (см. фиг. 3) при подаче напряжения на одну из входных обмоток трансформатора напряжение на его выходных обмотках изменяется по закоэу t/P,P,/-i/COSa Uf,p,l-Uslna, причем число пар полюсов одной мащины на единицу мевьще числа пар полюсов другой мащИны, т. е. . Таким образом, при наличии технологической, погрещности в какой-либо из систем ее действие на общий результат уменьшается в / раз, т. е. погрещности. разных систем усредняются, что позволяет повысить точность воспроизведения синусно-косинусного преобразования. Предмет изобретения 1.Бесконтактный синусно-косинусный вращающийся трансформатор, состоящий из двух электрических мащин с различным числом пар полюсов, выполненных в общем корпусе с общим валом, с расположением на статоре одной машины двух входных квадратурных обмоток, а на статоре другой двух выходных квадратурных обмоток и. с включенными друг на друга роторными обмотками, отличающийся тем, что, с целью повышения точности, преобразования, обмотки ротора содержат I пар отдельных квадратурных обмоток, причем оси пар обмоток на каждом роторе сдвинуты между собой на одинаковые геометрические углы, где .I 2.Трансформатор по п. 1, отличающийся тем, что ось одной пары обмоток одного ротора параллельна оси соединенной, с ней пары обмоток другого ротора, а последующие пары обмоток одного ротора, оси которых сдвинуты относительно оси первой пары на «.-оответствующий геометрический угол, соединены с парами обмоток другого ротора, оси которых сдвинуты относительно оси первой пары на противоположный геометрический угол. 3.Трансформатор по п. 1, отличающийся тем, что оси пар обмоток одного ротора параллельны осям соединенных с пими пар обмоток другого ротора.
C,Ci
Р,Рг
P
cpuz I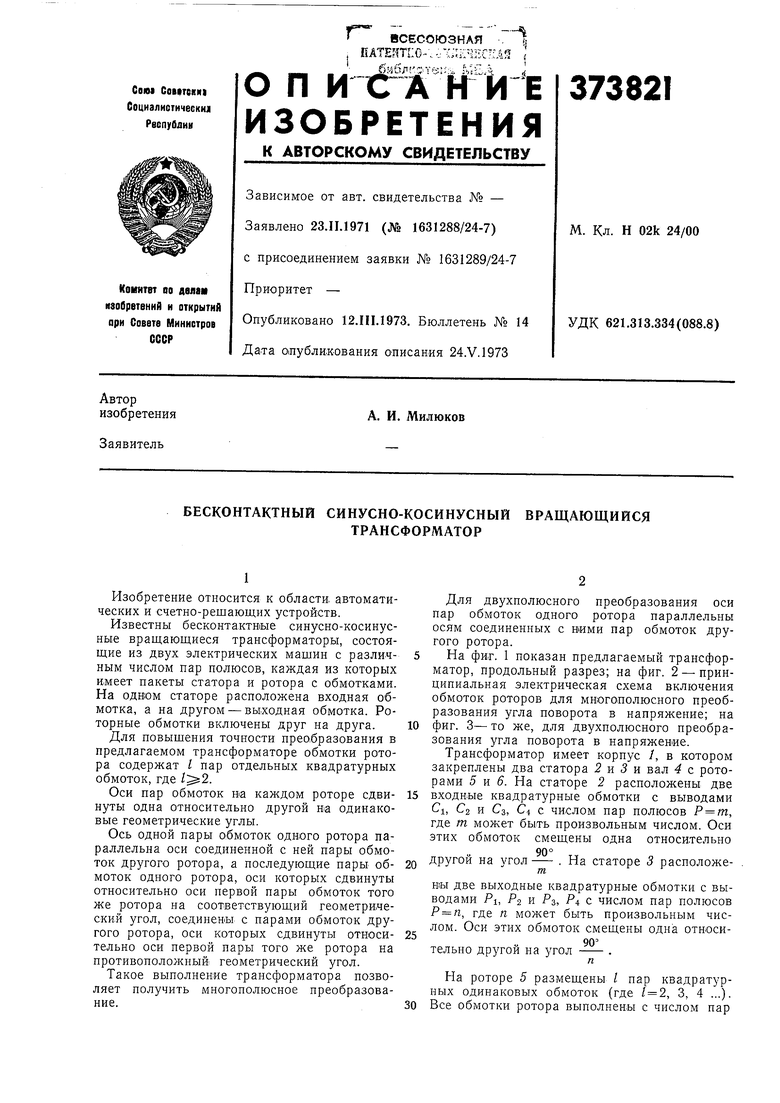
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЛЮСНЫЙ СИНУСНО-КОСИНУСНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1968 |
|
SU212353A1 |
| Двухканальный индукционный датчик угла | 1985 |
|
SU1316068A1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1065978A1 |
| Многополюсный вращающийся трансформатор | 1990 |
|
SU1737650A1 |
| Многополюсный синусно-косинусный вращающийся трансформатор | 1983 |
|
SU1141524A2 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1312696A1 |
| Двухотсчетный бесконтактный индукционный датчик угла | 1987 |
|
SU1566448A1 |
| Двухотсчетный вращающийся трансформатор | 1987 |
|
SU1598062A1 |
| МНОГОПОЛЮСНЫЙ СИНУСНО-КОСИНУСНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1971 |
|
SU318049A1 |
| Бесконтактный вращающийся трансформатор | 1983 |
|
SU1171915A1 |