1
Известны способы обнаружения элбктропроводящих тел в массе окружаюи его материала, имеющего более низкую электропроводность, заключающиеся в создании первичного поля звуковой частоты и измерении компонент вторичнюго поля.
Предложенный способ отличается тем, что создают первичное поле, измен1яющее свое направление и амплитуду так, что, когда тело, которое должно быть обнаружено, проходит через детектор, направление поля совпадает (или почти совпадает) с направлением вихревых токов, наведенных в теле, зависящих от формы тела и ориентации его на конвейере;, наблюдают изменения по фазе компоненты вторичного поля, вызванные обнаруживаемым телом и окружающей средой, причем фазовый сдвиг компоненты выбирают таким,что наблюдаемая компонента отличается по величине для обнаруживаемого тела и окружающего материала из-за различия их электропроводности; контролируют компоненту вторичного поля, измененную вихревыми токами или токами намагничивания, индуцированными в теле и окружающем материале первичным полем. Это позволяет повысить точность обнаружения.
Кроме того, наблюдаемая компонента вторичного поля Hia 90° (или почти на 90°) сдвинута по фазе относительно первичного ноля. Способ заключается .в следующем. При помощи стационарной системы катушек создают первичное поле звуковой частоты, направление которого является функцией места. Поэтому если обнаруживаемое тело проходит через детектор, направление ноля по крайней мере в одной точке зоны влияния детектора имеет то же самое или почти то же
самое направление, что и направление наиболее благоприятных вихревых токов индукции или намагничивания в указанном теле независимо от его формы, ориентации или положения на конвейере. Далее наблюдают одну или
более компонент вторичного поля, произнедениого в указанном первичном ноле обнаруживаемым телом и окружающей его средой, или наблюдают величину, пропорциональную указанным компонентам. Наблюдаемые компоненты сдвинуты по фазе относительно первичного поля,причем величина фазового сдвига выбирается такой, что эти компоненты заВ1 сят от размеров обнаруживаемого тела и от окружающей среды из-за различия проводимостей тела и среды. Затем создают такой детектор, что если обнаруживаемое тело находится в указанной благоприятной точке первичного поля, то оно одновременно располагается в благоприятной точке относительно
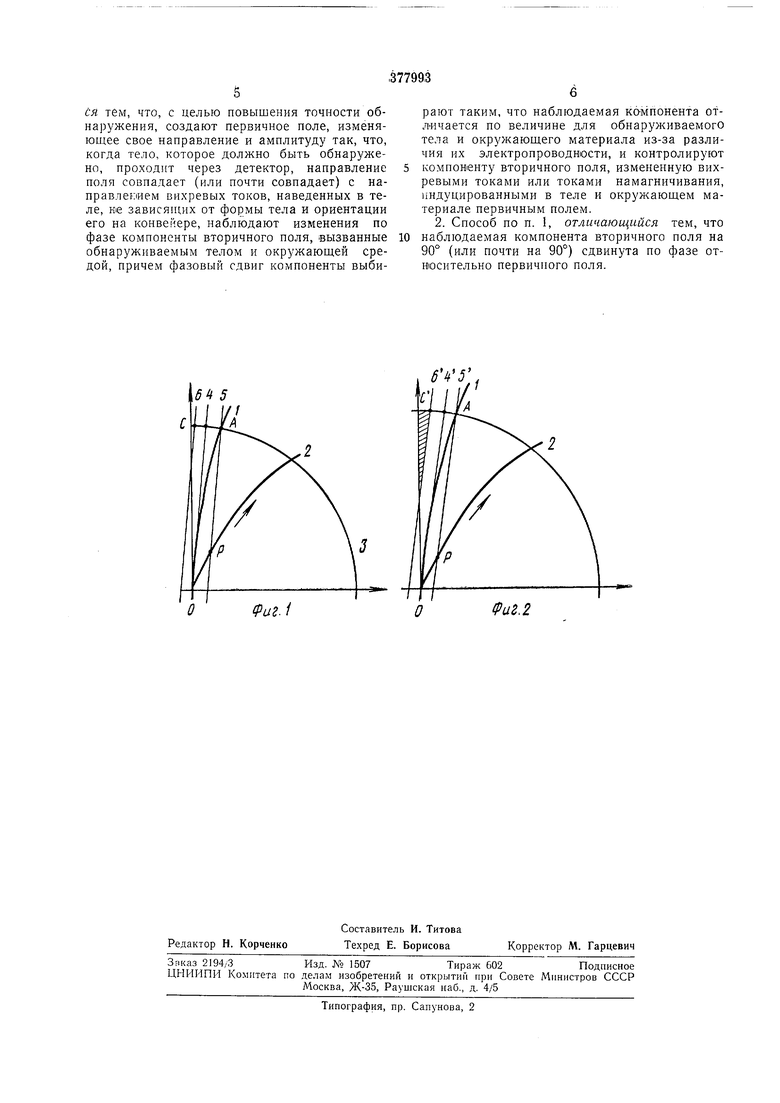
сигналов, произведенных частью детектора. После этого сравнивают сигналы, пропорциональные сдвинутой по фазе компоненте, с одной (нли более) заранее определенной предельной величиной. Для эффективной работы по описываемому способу необходимо, чтобы число сигналов тревоги, вызванных обнарул иваемым телом, было как можно большим по сравнению с числом сигналов тревоги, вызванных прочими телами и скоплением рудных материалов, в то время как влияние передающего поля, внешБих электромагнитных полей и окружающих однородных материалов, двигающихся в направлении движения ленты, должно быть как можно меньшим. Детектор осуществляет указанные принципы следующим образом: контролируется правильная фазовая компонента вторичного электромагнитного поля, вызванная возмущающим телом; выбирается правильная рабочая частота; выбирается наиболее благоприятное для обнаружения тела направление первичного поля; вторичное поле, вызванное обнаруживаемым телом, наблюдается в наиболее благоприятном направлении; катущечная система рассчитывается так, что передаваемое поле не вызывает сигнала в случае рудного материала; выбирается компонента сигнала, имеющая правильную фазу, т. е. соответствующим образом выбирается принцип работы устройства. Вторичное поле, произведенное в переменном электромагнитном поле проводящим телом, может быть разделено на две компоненты, одна из которых находится в фазе с первичным полем (действительная компонента), а другая сдвинута на 90° (мнимая компонента). Вторичное поле может быть представлено в виде действительно мнимых координат на единицу объема тела как функции отнощения размеров тела и глубины проникновения или как общее поле в функции частоты, размеров тела и т. д. В соответствии с законом индукции для луцщей работы -выбирается максимальная частота. Наибольшее отношение размеров наибольшего тела в материале к наименьшему, которое еще можно обнаружить, достигается Б случае, когда это отнощение становится независящим от частоты. Таким образом, верхний предел рабочей частоты определяется из наибольщей величины тела на глубину проникновения, при которой указанная зависимость еще имеет место (по крайней мере приблизительно). Начертив прямую, параллельную действительной оси из точки, представляющей рабочую частоту кривой общего поля окружающего материала, устанавливают, что она пересекает частотную кривую соответствующего металлического тела в точке, дающей размер наименьщего тела, которое еще можно обнаружить. 5 10 15 20 25 30 35 40 45 50 55 60 65 На практике формы обнаруживаемых тел н тел рудных материалов отличаются друг от друга. Каждой форме и материалу соответствует определенная кривая. Обнаружение будет наиболее эффективным, если использовать от мнимой компоненты. Выбор основывается на кривых, полученных экспериментально или теоретически, для окружающего материала, который вызывает наибольщую мнимую компоненту, и для размеров обнаруживаемого тела, которое вызывает наименьщую мнимую компоненту, так как эти формы или материал являются постоянными. Кривые 1 и 2 соответствуют различным размерам (см. фиг. 1 и 2). Для ясности кривая окружающего материала закруглена от действительной оси сильнее, чем это имеет место 8 действительности. Дугой 3 круга отмечен наибольший сигнал, который может быть подан в усилитель без появления нелинейности. Коэффициент усиления регулируется так, что точка А общего сигнала, соответствующая наибольщему из существующих тел рудного материала или скопления рудных тел, попадает в указанную окружность. Дуга АС делится на две части, после чего через центральную точку и начало О проводится прямая 4. Кроме того, через точки Л и С параллельно прямой 4 проводятся прямые 5 и 6. Компонента, перпендикулярная основной или фазовой прямой 4, выбирается в качестве коптрольной компоненты, для которой составляющая, вызванная окружающим материалом, всегда остается слева от прямой 5. Детектор делается таким, что обнаруживаются все тела, компонента которых с выбранной фазой достигает правой стороны прямой 5 (так называемый сигнал тревоги). Точка Р соответствует наименьщему телу, которое еще может быть обнаружено. Могут быть обнаружены и более мелкие тела, если линия (тревожный предел) повернута относительно точки А так, что она пересекает мнимую ось ближе к нулевой точке, чем это показано на фиг. 1. Точка пересечения фазовой линии сдвигается соответственно вправо, в -силу чего обнаруживаемая компопента больше отклоняется от мнимой компоненты (см. фиг. 2). В этом случае сигналы, заключенные между действительной осью и левым тревожным пределом (прямая 6), производятся отдельными рудными телами и скоплениями, а число тревог, вызванных ими, .может быть уменьшено выбором подходящего принципа работы устройства. Предмет изобретения 1. Электромагнитный способ обнаружения электропроводящих тел в массе окружающего материала, имеющего более низкую электропроводность, заключающийся в создании первичного поля звуковой частоты и измереНИИ компонент вторичного поля, отличающийся тем, что, с целью повышения точности обнаружения, создают первичное поле, изменяющее свое направление и амплитуду так, что, когда тело, которое должно быть обнаружено, проходит через детектор, направление поля совпадает (или почти совпадает) с направлекием вихревых токов, наведенных в теле, ке зависяи1,их от формы тела и ориентации его на конвейере, наблюдают изменения по фазе компоненты вторичного поля, :вызБанные обнаруживаемым телом и окружающей средой, причем фазовый сдвиг компоненты выбирают таким, что наблюдаемая компонента отличается по величине для обнаруживаемого тела и окружающего материала из-за различия их электропроводности, и контролируют
компоненту вторичного поля, измененную вихревыми токами или токами намагничивания, индуцированными в теле и окружающем материале первичным полем. 2. Способ по п. 1, отличающийся тем, что
наблюдаемая компонента вторичного поля на 90° (или почти на 90°) сдвинута по фазе отнюсительно первичного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения магнитных или немагнитных проводящих тел на конвейере | 1968 |
|
SU448656A3 |
| Способ электрической корреляции | 1981 |
|
SU1078388A1 |
| Устройство для индукционного каротажа | 1971 |
|
SU900823A3 |
| Способ измерения нелинейной вызванной поляризации при геоэлектроразведке и устройство для его осуществления | 1982 |
|
SU1038907A1 |
| Способ геоэлектроразведки | 1979 |
|
SU871035A1 |
| СПОСОБ АДАПТИВНОЙ НАСТРОЙКИ КАНАЛОВ УСКОРЕНИЯ В МНОГОКАНАЛЬНОМ ОБНАРУЖИТЕЛЕ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2013 |
|
RU2542347C1 |
| Способ геоэлектроразведки | 1982 |
|
SU1053042A1 |
| КОМПЛЕКСНЫЙ СИНТЕТИЧЕСКИЙ СПОСОБ И СИСТЕМА ДЛЯ КАНАЛИЗИРОВАНИЯ ФИЗИЧЕСКИХ И ИНФОРМАЦИОННЫХ СИГНАЛОВ | 2017 |
|
RU2699072C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ СЕГНЕТОЭЛЕКТРИЧЕСКОЙ АНТЕННЫ И ЕЕ УСТРОЙСТВО | 2004 |
|
RU2264005C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И МОНИТОРИНГА УРОВНЯ ЖИДКОГО МЕТАЛЛА В КРИСТАЛЛИЗАТОРЕ | 2007 |
|
RU2426622C2 |
л
4J
Фиг. 2
