Изобретение относится к преобразователям угла поворота вала в цифровой код , широко применяемым в системах автоматического регулирования и управления.
Известен 13-раз;рядный двоичный преобразователь последовательного счета с двумя датчиками грубого (ГО) и точного (ТО) отсчетов отметок начала отсчета и 8192 масштабными отметками. Рабочими элементами в каждом датчике являются чувствительный элемент (ЧЭ) на статоре и магнитные пластины на роторе. При повороте вала магниты ротора поочередно подключаются к ЧЭ и на нагрузке, включенной последовательно с обмоткой ЧЭ, появляются имлульсы. Датчики ГО и ТО соединены между собой и с входным валом преобразователя зубчатой передачей.
Благодаря передаче получается большое число выходных импульсов от малого числа магнитов, так как обЕ1,ее число импульсов равно произведению числа магнитов в ipOTOpe датчика ТО на передаточное отношение от входного вала до этого датчика. При передаточных отношениях более 100 главными погрешностями обладает передача, а ошибки изготовления датчика ТО делятся на передаточное отношение и становятся пренебрежимо малыми.
Однако предельная разрешаюш,ая способность и точность известных многоотсчетных
магнитомодуляционных редукторных преобразователей ограничивается вел ичиной порядка двух угловых .минут, т. е. 13 разрядов двоичного кода. Это ограничивает использование
известных преобразователей в прецизионных системах передачи угла.
Целью изобретения является повышение точности преобразователя (до уровня 15 разрядов двоичного кода).
Для этого в датчике ТО предлагаемого преобразователя оба ротора расположены соосно друг другу и охвачены рабочими наконечниками чувствительного элемента, магниты и магнитопроводящие пластины-шунты попеременно размеш,ены в пазах роторов, каждый из которых соединен с общим колесом зубчатой передачи, одно из которых содержит зубчатое колесо изменения направления вращения роторов.
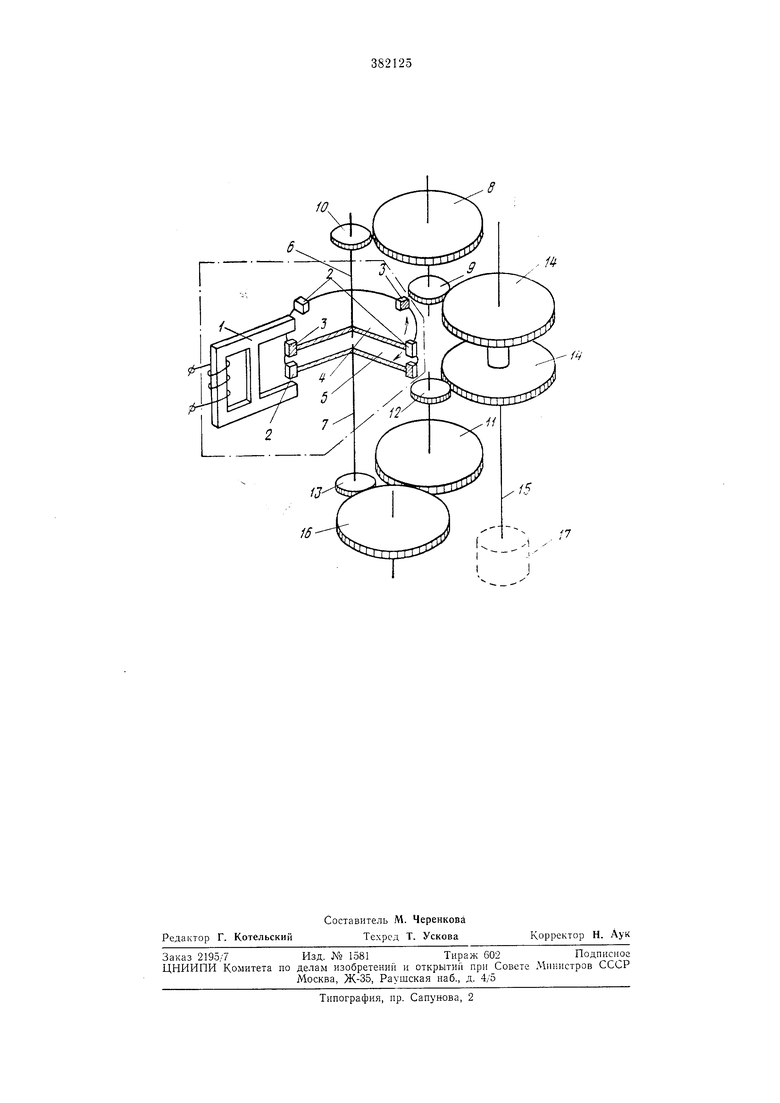
На чертеже дана конструктивная схема предложенного многоразрядного преобразователя угла поворота в код.
Преобразователь включает чувствительный элемент /, укрепленный на статоре датчика
ТО (па чертеже не показан), магниты 2 и магнитопроводящие пластины-шунты 3, укрепленные в пазах роторов 4 н 5 к равномерно чередующиеся. Роторы 4 и 5 одинаковы по конструкции и
закреплены на соосных валах 6 и 7. Оба ротора одинаковыми зубчатыми передачами, одна из которых содержит колесо 8 и шестерни 9, 10, а другая - колесо 11 и шестерни 12, 13, соединены с обш,им колесом 14 зубчатой передачи, укрепленным на входном валу 15 иреобразователя. Колесо 16 в одной из передач обеспеч.ивает встречное Враш;ение роторов датчика ТО.
Датчик 17 грубого отсчета расположен на входном валу 15.
Преобразователь работает следуюш.им образом.
При повороте входного вала 15 происходит одновременный поворот в противоположные стороны роторов 4 и5. Начальное положение роторов выбрано так, что магнит 2 ротора 4 и пластина-шунт 3 ротора 5 находятся в наконечниках чувствительного элемента 1 т на выходе его обмотки получен сигнал угловой отметки. Через некоторый угол, соответствуюш;ий повороту входного вала 15 на единицу младшего разряда кода, роторы 4 н 5 повернутся на один шаг и вместо магнита 2 и магнитопроводящей пластины-шунта 3 роторов 5 и 4 в након-ечники чувствительного элемента / попадут пластина 3 ротора 4 и магнит 2 ротора 5. Далее при повороте входного вала процесс повторяется.
Наличие двух роторов позволяет при одинаковом с обычным преобразователем шаге между магнитами в одном роторе получить двойное число импульсов, так как между магнитами одного ротора находится магнитопроводящая пластина-шунт, которая вместе с
магнитом другого ротора обеспечивает включение чувствительного элемента. Кроме того, получаемые импульсы вдвое меньше по ширине, чем в преобразователе с одним ротором
ТО, так как -время нахождения пластины и магнита разных роторов в чувствительном элементе благодаря сложению скоростей двух роторов со встречным врашением вдвое уменьшается по сравнению с обычной схемой. Сокращение шага между импульсами и сужение импульсов в датчике ТО обеспечивают повышение точности преобразователя.
Предмет изобретения
Многоразрядный преобразователь угла поворота в код, содержащий магнитомодуляционные датчики грубого и точного отсчета и зубчатую передачу, причем датчик точного
отсчета состоит «з чувствительного элемента и двух роторов с магнитами и магнитопроводящими пластинами-шунтами, отличающийся тем, что, с целью повышения точности преобразователя, в датчике точного отсчета оба ротора расположены соосно друг другу и охвачены рабочими наконечниками чувствительного элемента, магниты и магнитопроводяшие пластины-шунты попеременно размещены в пазах роторов, каждый из которых соединей
с абщим колесом зубчатой передачи, насаженным на входной вал, через соответствующие звенья зубчатой передачи, одна из которых содержит зубчатое колесо изменения направления вращения роторов.
fO
Г
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота в фазу | 1980 |
|
SU902042A1 |
| Преобразователь углового положения вала в фазу | 1983 |
|
SU1091203A1 |
| Преобразователь угла поворота вала в число импульсов | 1977 |
|
SU696518A1 |
| Магнитный преобразователь углового положения вала в код | 1978 |
|
SU765848A1 |
| БЕСКОНТАКТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ДВОИЧНО-ДЕСЯТИЧНЫЙ КОД | 1973 |
|
SU368633A1 |
| ПРЕОБРАЗОВАТЕЛЬ «УГОЛ — КОД» | 1973 |
|
SU397953A1 |
| Преобразователь угла поворота вала в электрический сигнал | 1980 |
|
SU894363A1 |
| ДВУХОТСЧЕТНЬШ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТАВАЛА В КОД | 1964 |
|
SU429447A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU670955A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД | 1970 |
|
SU283703A1 |