1
Известны электронные, магнитные и полупроводниковые устройства однополярного импульсного форсирования переходных процессов электромеханических устройств с подвиж 1ыми звеньями (реле, контакторов, электромагнитов, электромагнитных муфт и т. д.), осуществляющие подключение к обмотке электромеханических устройств (ЭМУ) источника существенно повышенного (форсирующего) напряжения t/ф на время, необходимое для увеличения силы (момента) ЭМУ от нуля до заданного (часто номинального) значения. Затем форсирующее напряжение отключается от обмотки ЭМУ без разрыва цепи и подключается источник напряжения f/уд, поддерживающий подвижное звено в конечном положении. Такие устройства содержат чувствительный элемент, включенный, например, в выходную цепь усилителя мощности, управляемого логическим элементом.
Построенные по такому методу форсирования устройства управления в подавляющем большинстве случаев не позволяют устранить вибрацию путем снижения скорости соударения подвижныу звеньев и обеспечить при этом минимальное время срабатывания, так как они осуществляют только разгон подвижной системы.
Предлагаемое устройство управления ЭМУ в значительной мере устраняет указанные
недостатки за счет достижения максимально возможной средней скорости управляемого звена при ограниченной конечной и отличается от известного тем, что к чувствительному элементу подсоединен пороговый временной формирователь длительностей форсирования и паузы управления, а к выходу управляющего логического элемента подсоединен ключ, обеспечивающий разовое включение порогового формирователя за цикл работы электромеханического устройства.
Такое построение схемы реализует оптимальный, по быстродействию однополярный алгоритм управления ЭМУ, динамика которых описывается дифференциальным уравнением не выще третьего порядка и позволяет осуществить «гибкое оптимальное импульсное форсирование переходных процессов и ликвидировать вибрацию подвижных звеньев в момент срабатывания за счет того, что под действием максимального донустимого управляющего форсирующего напряжения Пф, которое в определенный момент времени сбрасывается до нуля, подвижное звено проходит свой путь с максимально возможным ускорением. При этом момент сброса до нуля формирующего сигнала выбирают из такого ус-ловия, чтобы разогнавшееся на первом этапе пути подвижное звено под действием форсирующего напряжения (7ф могло бы по
инерция при разрыве цепи управления, преодолевая противодействующие движению звена механические силы (пружину, давление жидкости и т. д.), пройти оставшийся участок пути и встретиться с друпим звеном с иаперед заданной скоростью, выбранной ;из условия отсутствия вибрации звеньев. В момент безвяб1рационного срабатывания на обмотку ЭМУ подается сигнал, удерживающий подвижное звано в сработанном состоянии.
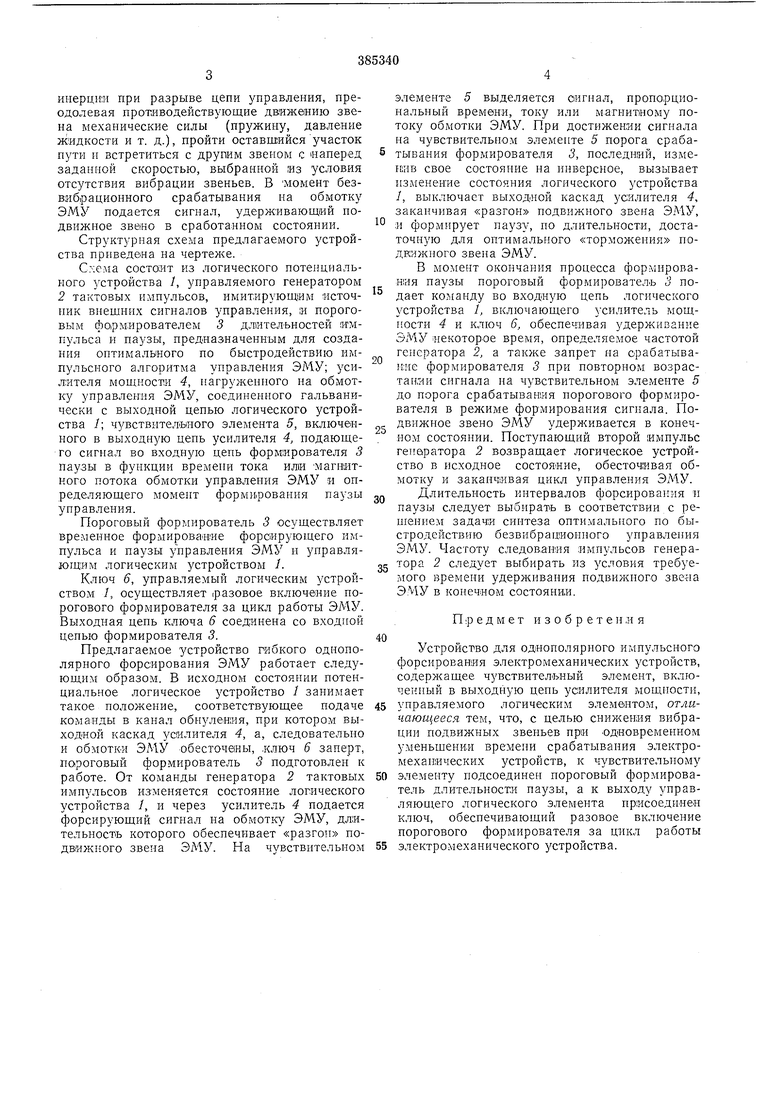
Структурная схема предлагаемого устройства приведена на чертеже.
Схе.ма состоит из логического потенциальиого устройства /, управляемого генератором 2 тактовых импульсов, имитирующим источник внешннх сигналов управления, и пороговым фО|рмирователем 5 длительностей етмпульса и паузы, предназначенным для создания оптимального по быстродействию импульсного алгоритма управления ЭМУ; усилителя мощности 4, нагрулсенного на обмотку управления ЭМУ, соединенного гальванически с выходной цепью логического устройства /; чувствительного элемента 5, включенного в выходную цепь усилителя 4, подающего сигнал во входную цепь формирователя 3 паузы в функции времени тока или магнитного потока обмотки управления ЭМУ и определяющего момент формИ(рования паузы управления.
Пороговый формирователь 5 осуществляет временное формировавшие форсирующего импульса и паузы управления ЭМУ и управляющим логическим устройством /.
Ключ 6, управляемый логическим устройством /, осуществляет ipasoBoe включение порогового формирователя за цикл работы ЭМУ. Выходная цепь ключа 6 соединена со входной цепью формирователя 5.
Предлагаемое устройство гибкого однополярного форсирования ЭМУ работает следующим образом. В исходном состоянии потенциальное логическое устройство / занимает такое положение, соответствующее подаче команды в канал обнуления, при котором выходной каскад зсилителя 4, а, следовательно и обмотки ЭМУ обесточены, .ключ 6 заперт, пороговый формирователь о подготовлен к работе. От команды генератора 2 тактовых импульсов изменяется состояние логического устройства /, и через усилитель 4 подается форсирующий сигнал на обмотку ЭМУ, длительность которого обеспечивает «разгон подвижного звена ЭМУ. На чувствительиом
элементе 5 выделяется сигнал, пропорциональный времени, току или магнитному потоку обмотки ЭМУ. При достижении сигнала на чувствительном элементе 5 порога срабатывания формирователя 5, последний, изменив свое состояние на инверсное, вызывает изменение состояния логического устройства /, выключает выходной каскад усилителя 4, заканчивая «разгон подвижного звена ЭМУ, и фор.мирует паузу, но длительности, достаточную для оптимального «торможения подкижного звена ЭМУ.
В момент окончания процесса формирования паузы пороговый формирователь 3 подает команду во входную цепь логического устройства /, включающего усилитель мощности 4 и ключ 6, обеспечивая удерживание ЭМУ некоторое время, определяемое частотой генератора 2, а также запрет на срабатывание формирователя 5 при повторном возрастании сигнала на чзвствительном элементе 5 до порога срабатывания порогового формирователя в режиме формирования сигнала. Подвижное звено ЭМУ удерживается в конечном состоянии. Поступающий второй имиульс генератора 2 возвращает логическое устройство в исходное состояние, обесточивая обмотку и заканчивая цикл управления ЭМ-У. , Длительиость интервалов форсирования и паузы следует выбирать в соответствии с реП1ением задачи синтеза оптимального но быстродействию безвибрационного управления ЭМУ. Частоту следования импульсов генерад тора 2 следует выбирать из условия требуемого времени удерживания подвижного звена ЭМУ в конечном состоянии.
П :р е д м е т и з о б р е т е н ,и я
Устройство для однополярного импульсного форсирования электромеханических устройств, содержащее чувствительный элемент, включенный в выходную цень усилителя мощности,
управляемого логическим элементом, отличающееся тем, что, с целью снижения вибрации подвижных звеньев при .одновременном уменьщени.и времени срабатывания электромеханических устройств, к чувствительиому
элементу подсоединен нороговый формирователь длительности паузы, а к выходу управляюп1,его логического элемента присоединен ключ, обеспечивающий разовое включение порогового формирователя за цикл работы
электромеханического устройства.
ff 9МУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для однополярного импульсного форсирования электромеханизмов | 1975 |
|
SU558321A1 |
| Устройство для однополярного импульсного форсирования электромеханических устройств | 1975 |
|
SU674113A1 |
| Устройство для импульсного форсирования электромеханизмов | 1984 |
|
SU1292064A1 |
| Устройство для однополярногоиМпульСНОгО фОРСиРОВАНия элЕКТРО-МЕХАНизМОВ | 1979 |
|
SU805438A1 |
| Устройство для импульсного форсирования электромеханизмов | 1986 |
|
SU1422249A1 |
| Устройство для управления электромагнитным механизмом | 1986 |
|
SU1356014A1 |
| Устройство для управления многофазным шаговым электродвигателем | 1982 |
|
SU1037410A1 |
| Устройство для управления транзисторным инвертором | 1980 |
|
SU888334A1 |
| Устройство для управления электромагнитом | 1986 |
|
SU1334192A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1644354A1 |

