Изобретение относится к измерительной технике и предназначено для использования в системах стабилизации, навигации, наведения и медицине.
Известен акселерометр (А.С. №742801, опубл. в БИ №23, 1980), содержащий чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент. Первый выход датчика угла подключен, через интегрирующий усилитель обратной связи, к датчику момента, а второй выход датчика угла, через пороговый элемент и дополнительный интегрирующий усилитель, к управляющему входу электронного ключа.
Недостатком акселерометра является низкая точность измерения, так как выбор коэффициента усиления с жесткой отрицательной обратной связью ограничен условием устойчивости системы. Точность работы акселерометра зависит от интегрирующих аналоговых усилителей, порогового элемента и электронного ключа, включенных в обратную связь. Основная погрешность устройства для измерения ускорений связана с конечностью времени заряда конденсатора интегрирующего усилителя. Эта погрешность приводит к апертурной ошибке, свойственной подобной схеме выборки и обработки информации.
Наиболее близким по техническому решению является компенсационный акселерометр для измерения ускорений (патент РФ №2513667 G01P 15/13, опубл. в БИ №11, 20.04.2014), содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, усилитель, вход которого соединен с выходом датчика угла, фазовый детектор отрицательной обратной связи, интегрирующую отрицательную обратную связь с выхода компаратора на вход датчика момента через последовательно соединенные по информационным входам компаратор, преобразователь уровня, два ждущих синхронных генератора, реверсивный двоичный счетчик, схему сравнения, триггер, электронный ключ, вход которого соединен с выходом генератора тока, суммирующий двоичный счетчик, выход которого соединен с одним из входов схемы сравнения, а вход, с выходом генератора вспомогательной частоты, генератор опорного напряжения, выходы которого соединены с входами датчика угла и фазового детектора отрицательной обратной связи, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика соединены с генератором вспомогательной частоты, введена местная отрицательная обратная связь с выхода усилителя на вход фазового детектора отрицательной обратной связи через последовательно соединенные по информационным входам сумматор, пороговый элемент, интегро-дифференцирующее звено с передаточной функцией  (где T1<T2 постоянные времени) и один из входов сумматора соединен с выходом интегро-дифференцирующего звена через звено запаздывания с передаточной функцией
(где T1<T2 постоянные времени) и один из входов сумматора соединен с выходом интегро-дифференцирующего звена через звено запаздывания с передаточной функцией  (где K и T - коэффициент передачи и постоянная времени звена запаздывания) и выход фазового детектора отрицательной обратной связи соединен с входом компаратором через дифференцирующее звено с передаточной функцией
(где K и T - коэффициент передачи и постоянная времени звена запаздывания) и выход фазового детектора отрицательной обратной связи соединен с входом компаратором через дифференцирующее звено с передаточной функцией  (где T1>T2 - постоянные времени звена запаздывания), и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра.
(где T1>T2 - постоянные времени звена запаздывания), и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра.
Недостатком компенсационного акселерометра является малая полоса пропускания и невысокая точность измерения.
Технической задачей настоящего изобретения является расширение полосы пропускания и повышение точности измерения.
Это достигается тем, что в компенсационный акселерометр, содержащий чувствительный элемент, отклонение которого фиксируется датчиком угла, генератор опорного напряжения, один из выходов которого соединен с датчиком угла, а другой выход соединен с входом фазового детектора, интегрирующий усилитель, отрицательную обратную связь, компаратор, выход которого соединен с входом магнитоэлектрического преобразователя через последовательно соединенные по информационным входам преобразователь уровня, два ждущих синхронных генератора, реверсивный двоичный счетчик, схему сравнения, триггер, электронный ключ, один из входов которого соединен с выходом генератора тока, а выход соединен с входом магнитоэлектрического преобразователя, суммирующий двоичный счетчик, выход которого соединен с одним из входов схемы сравнения, а вход соединен с выходом генератора вспомогательной частоты, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика соединены с генератором вспомогательной частоты, введены аналоговая и дискретная отрицательные обратные связи, причем аналоговая введена с выхода датчика угла на один из входов магнитоэлектрического преобразователя через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор, нелинейный элемент с зоной насыщения, дифференцирующее звено, а дискретная отрицательная обратная связь введена с выхода датчика угла на вход компаратора через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор, нелинейный элемент с зоной насыщения, пороговый элемент с зоной неоднозначности, интегратор, один из выходов генератора вспомогательной частоты соединен с входом порогового элемента с зоной неоднозначности и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра.
Введение в компенсационный акселерометр аналоговой и дискретной отрицательных обратных связей позволило создать автоколебательную систему с расширенной полосой пропускания и обеспечить астатизм по отклонению. Введение в аналоговую отрицательную обратную связь дифференцирующего звена обеспечивает устойчивость и стабилизацию параметров компенсационного акселерометра.
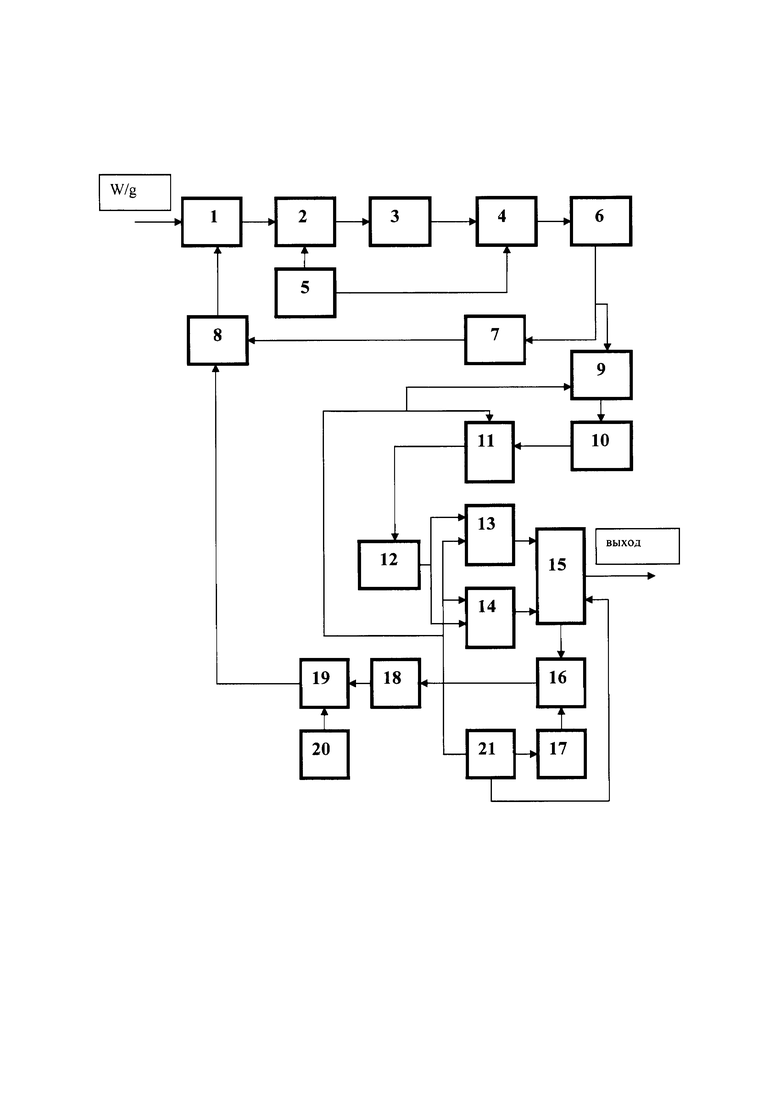
На фиг. изображена функциональная схема компенсационного акселерометра.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое отклонение которого фиксируется датчиком угла 2. Выход датчика угла 2 соединен с входом интегрирующего усилителя 3, выход которого соединен с входом фазового детектора 4. Дополнительные входы датчика угла 2 и фазового детектора 4 соединены с выходом генератора опорного напряжения 5. Выход фазового детектора 4 соединен с входом нелинейного элемента с зоной насыщения 6. Один из выходов нелинейного элемента с зоной насыщения 6 соединен с входом дифференцирующего звена 7. Выход дифференцирующего звена 7 соединен с одним из входов магнитоэлектрического преобразователя 8. Другой выход нелинейного элемента с зоной насыщения 6 соединен с входом порогового элемента с зоной неоднозначности 9, выход которого соединен с входом интегратора 10. Выход интегратора 10 соединен с входом компаратора 11, выход которого соединен с входом преобразователя уровня 12. Выходы преобразователя уровня 12 соединены с входами двух ждущих синхронных генераторов 13 и 14. Выходы ждущих синхронных генераторов 13 и 14 соединены с входами реверсивного двоичного счетчика 15. Выход реверсивного двоичного счетчика 15 соединен с входом схемы сравнения 16. Другой вход схемы сравнения 16 соединен с выходом суммирующего двоичного счетчика 17. Выход схемы сравнения 16 соединен с входом триггера 18. Выход триггера 18 соединен с входом электронного ключа 19, другой вход которого соединен с выходом генератора тока 20. Выход электронного ключа 19 соединен с одним из входов магнитоэлектрического преобразователя 8. Магнитоэлектрический преобразователь 8 соединен с чувствительным элементом 1. Дополнительные входы порогового элемента с зоной неоднозначности 9, компаратора 11, ждущих синхронных генераторов 13 и 14, реверсивного двоичного счетчика 15 и суммирующего двоичного счетчика 17 соединены с выходами генератора вспомогательной частоты 21.
Внутреннее содержание порогового элемента с зоной неоднозначности, нелинейного элемента с зоной насыщения, компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика, схемы сравнения, суммирующего двоичного счетчика, преобразователя уровня описаны в книгах: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т. 1-3, 1993, Н.Т. Кузовков Динамика систем автоматического управления. М.: Машиностроение, 1968, С. - 428.
Компенсационный акселерометр работает следующим образом. При действии ускорения W/g отклонение чувствительного элемента 1 фиксируется датчиком угла 2, обмотки, возбуждения которого соединены с одним из выходов генератора опорного напряжения 5. Сигнал с датчика угла 2, после усиления интегрирующим усилителем 3, поступает на один из входов фазового детектора 4. Другой вход фазового детектора 4 соединен с выходом генератора опорного напряжения 5. Напряжение с выхода фазового детектора 4, в соответствии с фазой отклонения чувствительного элемента 1, поступает на вход нелинейного элемента с зоной насыщения 6. Сигнал с выхода нелинейного элемента с зоной насыщения 6 поступает как на вход дифференцирующего звена 7, так и на вход порогового элемента с зоной неоднозначности 9. Сигнал, в виде уровня, с выхода порогового элемента с зоной неоназначности 9 поступает на вход интегратора 10. Напряжение на выходе порогового элемента с зоной неоднозначности 9 фиксируется с приходом каждого импульса с генератора вспомогательной частоты 21 и поступает на вход интегратора 10. На выходе интегратора 10 сигнал, в виде ступенчатого напряжения, поступает на один из входов компаратора 11, в котором происходит сравнение сигнала с выхода интегратора 10 с сигналом выделенного из стабильного по частоте и амплитуде сигнала генератора вспомогательной частоты 21. Если сигнал с выхода интегратора 10 больше треугольного напряжения с выхода генератора вспомогательной частоты 21, то на выходе компаратора 11 будет высокий логический уровень, если меньше, то на выходе компаратора 11 - низкий логический уровень. Уровень сигнала с выхода компаратора 11, зависит от фазы отклонения чувствительного элемента 1. Сигнал с выхода компаратора 11, в виде уровня, поступает на вход преобразователя уровня 12, а затем на входы двух ждущих синхронных генераторов 13 и 14, которые, с помощью генератора вспомогательной частоты 21, выдают сигналы в виде импульса, на каждое воздействие входного сигнала (с выхода преобразователя уровня 12) равного "1". Реверсивный двоичный счетчик 15 производит подсчет единичных импульсов, поступающих с выхода ждущего синхронного генератора 13 и вычитание импульсов, поступающих с выхода ждущего синхронного генератора 14. Реверсивный двоичный счетчик 15 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде, и преобразование дополнительного кода осуществляется схемой сравнения 16 и суммирующим двоичным счетчиком 17. После логического сравнения сигналов в схеме сравнения 16, сигнал поступает на вход триггера 18. Сигнал с выхода триггера 18, в виде уровня, поступает на вход электронного ключа 19. Стабилизация параметров электронного ключа 19 осуществляется генератором тока 20. Число импульсов, с выхода электронного ключа 19, пропорционально двоичному коду, поступающему на вход схемы сравнения 16. Выход электронного ключа 19 соединен с входом магнитоэлектрического преобразователя 8, который компенсирует угловое отклонение чувствительного элемента 1, вызванное действием ускорения. Выход реверсивного двоичного счетчика 15 является выходом цифрового кода компенсационного акселерометра.
Введение в отрицательную обратную связь, порогового элемента с зоной неоднозначности и интегратора позволяет повысить точность измерения, создать автоколебательную систему с расширенной полосой пропускания и астатизмом по отклонению. Введение дифференцирующего звена в аналоговую отрицательную обратную связь позволяет обеспечить устойчивость и стабилизацию параметров компенсационного акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный акселерометр | 2022 |
|
RU2784473C1 |
| Компенсационный акселерометр | 2020 |
|
RU2738877C1 |
| Акселерометр | 2019 |
|
RU2696667C1 |
| Акселерометр | 2024 |
|
RU2818692C1 |
| Компенсационный акселерометр | 2021 |
|
RU2756937C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793895C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2780407C1 |
| Устройство для измерения ускорений | 2023 |
|
RU2809588C1 |
| Компенсационный акселерометр | 2019 |
|
RU2708716C1 |
| Компенсационный акселерометр | 2018 |
|
RU2676217C1 |
Изобретение относится к измерительной технике. Сущность изобретения заключается в том, что в компенсационный акселерометр дополнительно введены аналоговая и дискретная отрицательные обратные связи, причем аналоговая введена с выхода датчика угла на один из входов магнитоэлектрического преобразователя через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор, нелинейный элемент с зоной насыщения, дифференцирующее звено, а дискретная отрицательная обратная связь введена с выхода датчика угла на вход компаратора через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор, нелинейный элемент с зоной насыщения, пороговый элемент с зоной неоднозначности, интегратор, один из выходов генератора вспомогательной частоты соединен с входом порогового элемента с зоной неоднозначности и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра. Технический результат – расширение полосы пропускания и повышение точности измерения. 1 ил.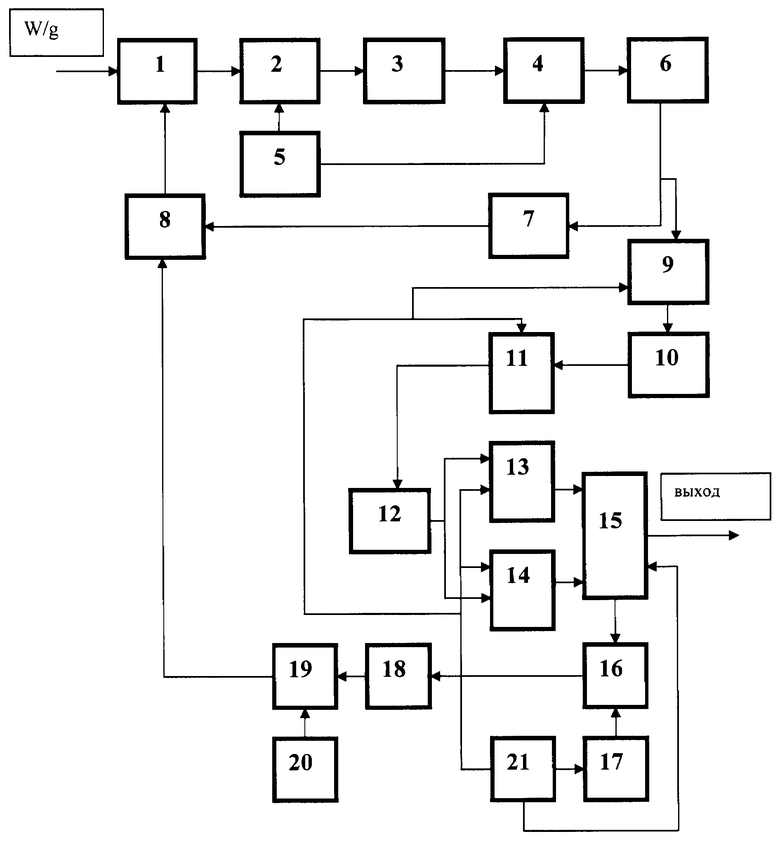
Компенсационный акселерометр, содержащий чувствительный элемент, отклонение которого фиксируется датчиком угла, генератор опорного напряжения, один из выходов которого соединен с датчиком угла, а другой выход соединен с входом фазового детектора, интегрирующий усилитель, отрицательную обратную связь, компаратор, выход которого соединен с входом магнитоэлектрического преобразователя через последовательно соединенные по информационным входам преобразователь уровня, два ждущих синхронных генератора, реверсивный двоичный счетчик, схему сравнения, триггер, электронный ключ, один из входов которого соединен с выходом генератора тока, а выход соединен с входом магнитоэлектрического преобразователя, суммирующий двоичный счетчик, выход которого соединен с одним из входов схемы сравнения, а вход соединен с выходом генератора вспомогательной частоты, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика соединены с генератором вспомогательной частоты, отличающийся тем, что в него введены аналоговая и дискретная отрицательные обратные связи, причем аналоговая введена с выхода датчика угла на один из входов магнитоэлектрического преобразователя через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор, нелинейный элемент с зоной насыщения, дифференцирующее звено, а дискретная отрицательная обратная связь введена с выхода датчика угла на вход компаратора через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор, нелинейный элемент с зоной насыщения, пороговый элемент с зоной неоднозначности, интегратор, один из выходов генератора вспомогательной частоты соединен с входом порогового элемента с зоной неоднозначности и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2541720C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2754203C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2138822C1 |
| US 2017168086 A1, 15.06.2017. | |||

