Существующие устройства для дистанционной защиты от замыкания на землю высоковольтных сетей представляет собой обычно три дистанционных реле, включенных на фазовое напряжение и фазовый ток. Такая система защиты имеет тот недостаток, что величина замеряемого помощью реле импеданца или реактанца зависит не только от места аварии (.удаленности места аварии от места установки реле , но и от целого ряда дополнительных и меняющихся, в зависимости от эксплоатационных условий, факторов. Для пояснения сказанного автором произведен ниже подсчет величины тока и напряжения, подведенных к дистанционному реле, в случае замыкания на землю одной фазы.
Всякую сложную систему электрических сетей можно заменить эквивалентной-элементарной системой, показанной на фиг. i чертежа. На этой фигуре т и п-два генерирующих источника, /-рассматриваемый нами участок защищенной линии; //--эквивалентная параллельная линия, импеданц которой равен импеданцу всей параллельно приключенной электрической системы.
Спрашивается, каковы будут величины напряжения и тока, подведенных
(497)
к реле, установленному вблизи генериI рующего источника /и, если замыкание на зеь5лю фазы а произойдет в точке k.
Напряжение, подведенное к реле
i ;-K,.-.. -(п
; Но
F, ,„:-/,,„ (/Z, +Л) + А,.,.,2)
7,„, 4,Л/2.-).7 --1-Т;,,(3)
Т . (77 iP - / ,Ц.
1о,„ - 9,,, v-- o о;-.,,))/ , ..
I / : - h,, - 0,
; где:
напряжение положительной последовательности фаз у места установки реле;
напряжение отрицательной последовательности фаз у места установки реле;
напряжение нулевой последовательности фаз у места установки реле;
il - напряжение положительной последовательности фаз в точке Е;
ZE - напряжение отрицательной последовательности фаз в точке Е
VOE - напряжение нулевой последовательности фаз в точке Е;
от - соответственно токи поvn- Aim ложительной, отрицательной и нулевой последовательности фаз токов, протекающих от станции ffi к месту аварии (точка /г);
fijmt, - нулевой последовательности фаз параллельной линии;
|, /о„ - соответственно токи по1яложительной, отрицательной и нулевой последовательности фаз токов, протекающих от станции п к месту аварии;
I-расстояние от места установки реле до места аварии в километрах;
Zi - равное Z - импеданц одного километра линии для токов попожительной и отрицательной последовательности фаз;
Zfl - соответственно импеданц для токов нулевой последовательности фаз;
R - сопротивление места повреждения (сопротивление дуги и переходное сопротивление места заземления); Л4в,„„ импеданц взаимоиндукции одного километра соседней параллельной линии.
Подставив значения F,, 3, и VQ з уравнений (2), (3) и (4) в уравнение (1) и приняв во внимание, что
Fjjj-j- Р замыкании на землю фазы и эта сумма
lE-i- 2Е+ «S аЕ 0 ПОЛуЧИМ
„. - А,„ (IZ, + R) + /,, (/Z,+/) /о„ (iz,+R)r (4+4« -I- /, j/M+ о,„„Жж„(5)
Прибавив к правой части уравнения (5) и затем отняв от нее член
) и У-тя, что Л,„-|-/2,„-Ь
+ m 4т и А,„ Н- + А„ /„„. получим
.,.-LJZ-, + l,J(Z,,}-i+ (4,. А,„,. - .(6)
Импеданц, измеряемый помощью реле
уf
7 J 117 7
Z, - - - -i г -j- V0 1/ Т am«jw.
1 am - an n i mn -,.,
I..К г Y
ant(ijn
Из ЭТОГО выражения видно, что импеданц, замеряемый помощью реле, зависит не только от расстояния / до места аварии, но и от отношения тока нулевой последовательности к току поврежденной фазы (второй член правой части уравнения), от сопротивления дуги (третий член правой части уравнения), от импеданца взаимоиндукции и тока нулевой последовательности, протекающего по параллельной линии (четвертый член правой части уравнения). Эти добавочные члены вносят большей частью значительные искажения замеряемого импеданца и, таким образом, основное качество дистанционного реле, выдержка времени которого зависит от длины I, теряется.
Для того, чтобы сделать импеданцную защиту менее зависимой от посторонних вышеперечисленных факторов, имеется ряд искусственных методов компенсации этих дополнительных членов. Одним из методов этой компенсации является так называемая токовая компенсация.
Уравнение (б) может быть представлено в следующем виде:
«-. С+/0.
L 1 J
+ ,(/„„ + /„„) .(6.)
1 J
Если к реле подвести не ток поврежденной фазы, а ток
/ о
р-ttm . mу отп у (8)
ТО
-(.«,-4.)- -(9)
Из выражения (9) видно, что третий и четвертый члены правой части уравнения (7) выпадают, то-есть измеренный импеданц значительно ближе к действительному импеданцу поврежденного участка.
Полную токовую компенсацию произвести чрезвычайно трудно, так как коэфициенты уравнения (ба) при /с,„ и /о,„„ представляют собой векторы, то есть токи /0., и /о,„„ нужно не только соответствующим образом трансформировать, но и векторы этих токов нужно повернуть на некоторый угол. Регулирование поворота векторов тока чрезвычайно затруднительно. Поэтому большинство заграничных фирм при осуществлении токовой компенсации ограничивается только соответствующей трансформацией токов /о без поворота этих векторов и, таким образом, осуществляют только частичную компенсацию.
Предлагаемое устройство имеет целью дать полную компенсацию влияния токов нулевой последовательности фаз как поврежденной, так и параллельной линии, и кроме того уменьшить число дистанционных реле, применяемых для защиты от замыкания на землю, без переключения как в цепи тока, так и в цепи напряжения (обычно применяются три реле, го одному реле на каждую фазу; в предлагаемой системе применяется одно реле на все тр1и фазы).
Сущность предлагаемого устройства заключается в том, что к реле подводятся напряжение К. и ток
Умножив на два уравнение (3) и сложив результат с уравнением (2), получим:
f-i.-f 2 ;„.-(/;,„-; 2 rj(/Z, + /)-f
-r(/.-v2/J/ (10)
так как при замыкании на землю Т ,д-1-2 7,-0.
Импеданц, подведенный к реле,
+ 2 1%,,
-- /У I
„ Г Т
Р
„Г- -2/„„
i
1/ ... (И) / -- I - I
i;n 1 -№ Как видно из этого выражения, импеданц, замеряемый помощью реле, зависит от расстояния / и от сопротивления R дуги, то-есть порядок точности измерения будет, примерно, такой же, как в случае полной токовой компенсации (см. уравнение (9).
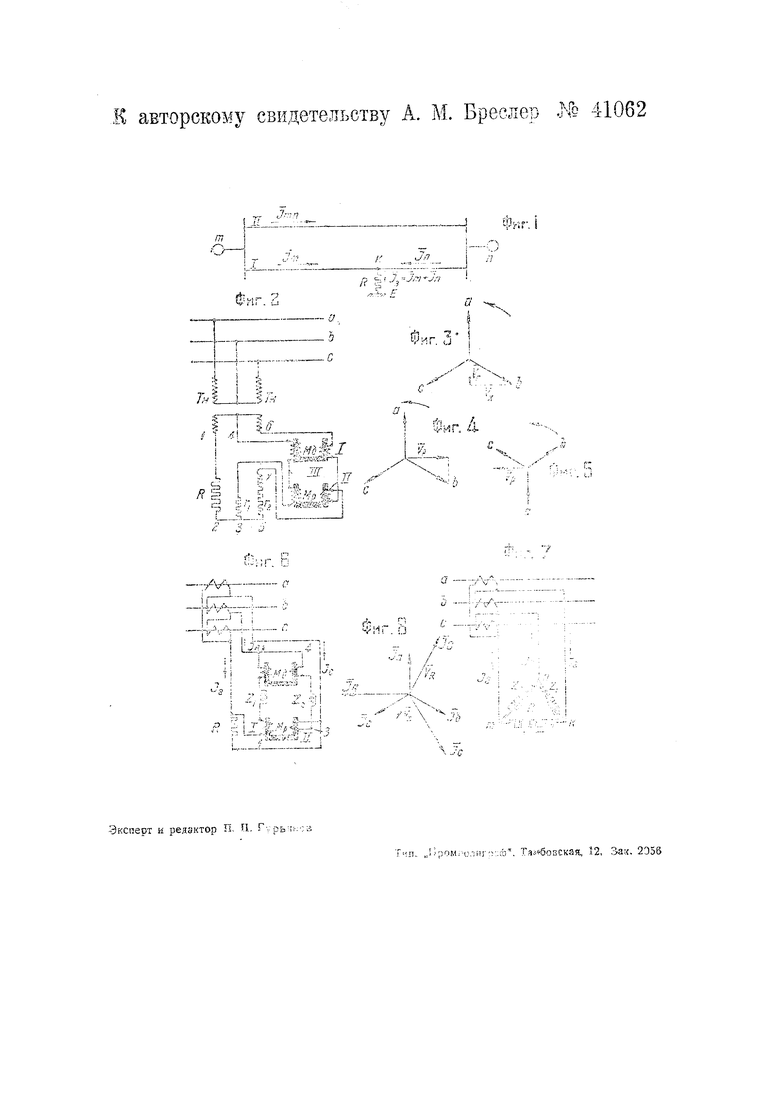
На фиг. 2, 6, 7 чертежа изображены электрические схемы предлагаемого устройства для дистанционной защиты, которые дают решение задачи подведения к реле напряжения 1,, К,,, и тока /1„| -|- 2 фиг. 3, 4, 5 и 8 изображают векторные диаграммы, поясняющие действие устройства.
Реле выполняется с двумя обмотками напряжения и двумя токовыми обмотками, причем одна из токовых обмоток имеет в два раза больше витков, чем вторая, а число витков одной обмотки напряжения в У 2 раз больше другой.
На фиг. 2 показан способ питания цепи напряжения реле. Здесь Ai - представляет собой электромагнит напряжения реле, а УИ - добавочный электромагнит, причем этот электромагнит должен быть рассчитан таким образом, чтобы коэфициенты взаимоиндукции обоих магнитов /V/., и М были одинаковы. Добавочный электромагнит Ж служит для компенсации импеданца взаимоиндукции обмоток магнита /W . Обмотки этих магнитов включаются таким образом, что потоки катушек / и // направлены навстречу друг другу.
Реле питается от двух однофазных трансформаторов напряжения Т, соединенных в открытый треугольник. Сопротивление г подбирается таким образом, Чтобы цепь 3-4 имела импеданцный угол в 60°. Сопротивление R подбирается таким образом, чтобы численно оно было равно импеданцу цепи 3-4. Сопротивление г и х подбираются таким образом, чтобы цепь 5-6 имела такой же импеданц, как цепь и-4, и импеданцный угол, равный 60°.
Если все указаннь е выше условия выполнены, то по цепи о-6 будет протекать ток, величина которого зависит от величины напряжения положительной последовательности, а по цепи 3-4 будет протекать ток, зависящий от величины напряжения отрицательной последовательности фаз.
Индуктивное надение напряжения
Q , - г
в цепях с5 -4 и о-b равно -„- от а-азового напряжения соотсетстзующей симметричной составляющей (см. фиг. 3). Таким образом индуктивное падение напряжения на катушке // будет
величины напряжения полоравно
жительной последовательности и повернуто в сторону отставания от напряжения полон4ительной последовательности фазы .-. на 90, как это и казано ма диаграмме фиг. 4. Индуктизное падение напряжения в катушке ///
и/3
будет равно -:,- от напряжения отрицательной последовательности фаз и будет отставать от вектора напряжения соответствующей последовательности фазы на 90. Таким образом, магнитодвижущая сила магнита М будет проУ З -порциональна -я (j;« Ь 2 г,). Диаграмма напряжений отрицательной последовательности фаз показана на фиг. 5.
Схема питания токовой цепи устройства показана на фиг. 6. В токовую цепь также включается добавочный электромагнит уИд последовательно с катушками токового электромагнита М назначение электромагнита М такое же, как и в цепи напряжений, то-есть компенсация импеданца взаимоиндукции обеих катушек реле.
Сопротивления и -И., подбираются таким образом, чтобы импеданциые углы цепей 1-2 и 3-4 были равны 60° и обе цепи 1-2 и 3-4 имели одинаковое полное сопротивление. Активное сопротивление R берется равным полному сопротивлению цепи 1-2. Такая система представляет собой фильтр токов положительной и отрицательной последозательности фаз. По цепи 1-2 могут протекать только токи отрицательной последовательности фаз, а по цепи 3-4 могут протекать только токи положительной последозательности фаз. Об мотка / имеет в два раза больше зитков, чем обмотка П. Работа фильтра поясняется фиг. 7 и диаграммой фиг. 8. Если смете.та токов /., /,, и //, погд -1-ОО
ставляет собой симметричную систему токов, то по цепи Я, ток протекать на будет, так как точки т и п будут иметь одинаковый потенциал. Вектор напряжения меичду точками in и k будет, очевидно, направлен по вектору /д, так как R-активное сопротивление и ток протекаюпдий по R, будет раоен :.,. Величина этого напряжения будет равна i; --li i- Напряженке между точками /V и п будет произведению и вектор этого напряжения будет
опережать вектор тск. /, на 50, то есть вектор V. будет разеы по величине и обратен по направлению вектору Vj,, так как , а импеданцный угол вектора равен бО (условие, оговоренное выше). Таким образам, видно, что потенциалы точек т и fi равны, вследствие чего по цепи сопротивления Q ток протекать не будет, то-есть токи положительной последовательности фаз по цепи rfj не будут протекать. Аналогично можно видеть.
что токи отрицательной последовательности фаз не будут протекать по цепи Z. Поэтому цепь Z представляет собой цепь токов отрицательной последовательности фаз, причем величина тока, протекающего по этой цепи, в 1 3 раз больше составляющей отрицательной последовательности фаз и опережает вектор тока фазы а на 90°, а цепь Z представляет собой цепь положительной последовательности фаз и величина тока, протекающего по этой цепи, в К 3 раз больше составляющей положительной последовательности фаз и опережает фазу а на 90°. Так как катушка / имеет в два раза больше витков, чем катушка //, то магнитодвижущая сила магнита М будет пропорциональна V 3 (/1,„ |- 2 /2,„). Таким образом
. Q . - (.„ г 2 V, J
где Cj и С,, - коэфициенты пропорциональности.
С
8 Множитель/----- входит в велиСо , 3
чину постоянной прибора. Таким образом реле будет замерять импеданц.
. + 2 V.,,
равный /1« + 2/.„.
Предмет изобретения.
Устройство для дистанционной защиты многофазных электрических установок с заземленной нейтралью от замыканий на землю с применением реле полного сопротивления, компенсированных от влияния тока нулевой последовательности в поврежденной линии и от воздействия параллельных линий, отличающееся тем, что, с целью более полной компенсации, электромагниты напряжения и тока в реле сопротивления присоединены к измерительным трансформаторам через таким образом соразмеренные индукционные и омические сопротивления, чтобы первый питался от напряжения, равного геометрической сумме напряжения положительной последовательности и удвоенного напряжения отрицательной последовательности поврежденной линии, а второй-током, равным такой же сумме токов аналогичного наименования.
-Ч -.
.-
Jl: ---- i
,, ij,
Фиги I
fiat Ч а (
k I I
Т,Ч /:
-е: ,j-.-ff-J т
-ff, /
1ir- l f, 77Г I ,.
Ли-
D c2Ir iI -,,
.b -.--io ж .
Hel -,.. - «каУйй Г j
а,
L1,.L,
Фнг.Я

