В существующих дальномерах с постоянною базою как монокулярных, так и стереоскопических, для измерения параллактического угла применяются подвижные одноклиновые и вращающиеся одноклиновые и двуклиновые комненсаторы.
Такие компенсаторы применимы только к оптическим трубам с двумя объективами, которые располагаются в линии измерительного треугольника.
Эти компенсаторы неприменимы вовсе для дальномеров с одной оптической трубой (с одним объективом), расположенной перпендикулярно к базе измерительного треугольника, т. е. направленной непосредственно на цель.
Предлагаемый зеркальный (призменный) компенсатор применим как к оптическим трубам с двумя объективами, так и с одним объективом, причем в первом случае зеркальный компенсатор располагается в конце базы измерительного треугольника, а во втором случае -в начале базы измерительного треугольника непосредственно перед объективом трубы.
В предлагаемом зеркальном компенсаторе к дальномеру, снабженном направляющим клином, последний установлен неподвижно, а зеркало-с возможностью продвижения, при одновременном его повороте помопшю рычага, предназначенного скользить по наклонной плоскости клина в направлении оптической оси трубы дальномера и укрепленного на оси зеркала под углом в 45° к плоскости зеркала.
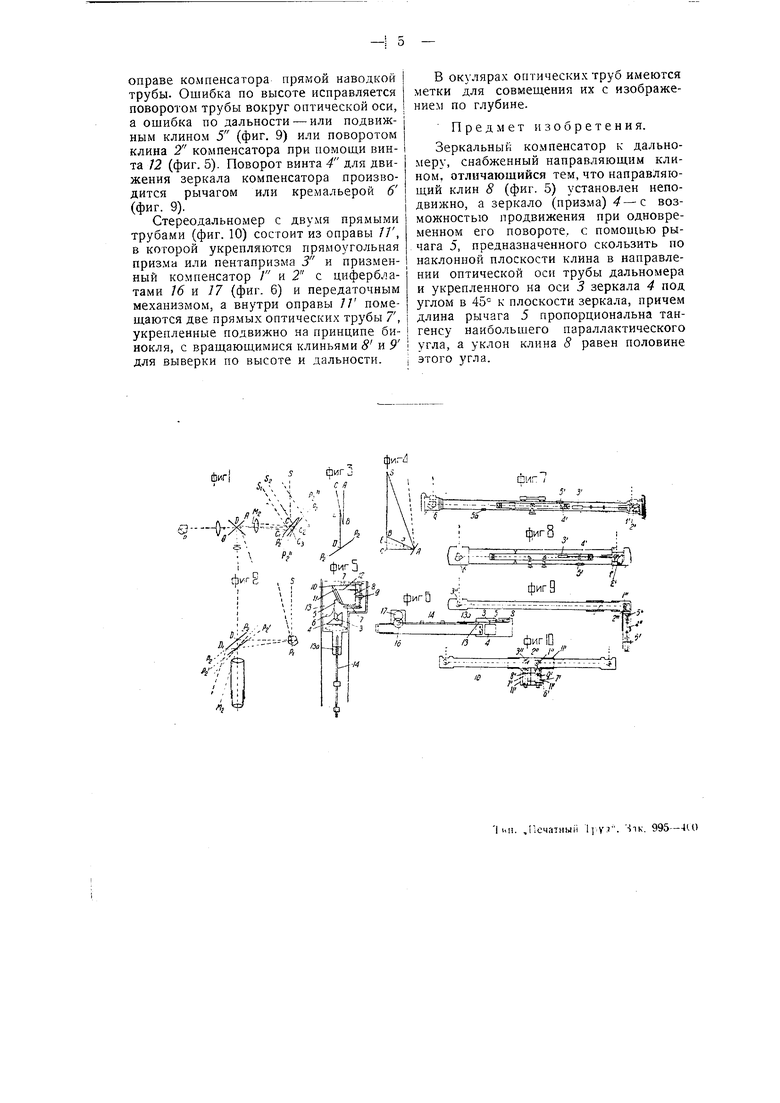
На чертеже фиг. 1 изображает схему располон ения зеркального компенсатора у дальномеров, имеющих оптическую трубу с двумя объективами; фиг. 2 - схему расположения зеркального компенсатора у дальномеров, имеющих оптическую трубу с одним объективом; фиг. 3 - схему построения зеркального компенсатора; фиг. 4 - схему измерительного треугольника; фиг. 5 - горизонтальный разрез дальномерного устройства; фиг. 6 - вертикальный разрез дальномерного устройства; фиг. 7 - применение зеркального компенсатора в монокулярном дальномере с двухъобъективной трубой; фиг. 8-то же, в стереодальномере с двухъобъективной трубой; фиг. 9 -- применение зеркального компенсатора в дальномере с одной оптической трубой; фиг. 10 - то же, в стереодальномере с двумя прямыми оптическими трубами.
Если на конце базы (фиг. 1) постпвить зеркало (призму) Р-, под углом в 45 к оптической оси трубы, то луч от бесконечно удаленного предмета, отразившись от зеркала Яг, пойдет по линии оптической оси трубы н отразится от
призмы АА под углом в 90. Луч 5, от ближестоящего предмета, отразившись от зеркала Ра составит с оптической осью трубы некоторый параллактический угол а и после отражения от призмы АА, отклонится от первоначального направления на угол а и даст раздвоенное изображение в окуляре.
Если мы передвинем зеркало А параллельно самому себе на расстояние ССо, равное ССд, т. е. тангенсу я, то луч S-j от того же предмета, отразившись от зеркала Р , практически при малых параллактических углах составит с оптической осью трубы тот же угол а, т. е. отраженный луч CgM, будет параллельным отраженному лучу QD.
Если теперь зеркало Р , повернуть с точки Сз на угол а/2 и поставить его в положение Р , то луч S от предмета повернется на угол а и снова пойдет по линии оптической оси трубы, отчего раздвоенное изображение будет сведено в одно целое. Всякому другому лучу (от другого предмета) будет соответствовать другой параллактический угол, а следовательно и другой тангенс, на длину которого надо будет передвинуть зеркало PS, чтобы затем повернуть его на половину параллактического угла для сведения раздвоенных изображений. Передвижение зеркала Р на длину тангенса параллактического угла и является измерительной инстанцией предложения, а поворот зеркала Pg на половину параллактического угла, осуществляемый каждый раз автоматически, служит лишь для определения момента прохождения зеркалом Р длины соответствующего тангенса параллактического угла; другими словами, поворот зеркала Р (определяемый в окуляре трубы совмещением изображений) служит моментом для отсчета дистанции по барабану или по циферблату.
Исследование показывает, что удлинение базы от перемещения зеркала Pg всюду (фиг. 1) на 10 сантиметров влечет изменение параллактического угла, весьма незначительно отражающееся на точности определения дистанции вследствие обратной пропорциональности величин теоретических ошибок в дистанциях и ошибок параллактических углов. Например, при дистанции 30 м и базе в 1 м,
параллактический угол равен О, 1Г, 27,5, а при дистанции в 300 м и базе в 1 м 10 см он равен 0°, 12, 36, т. е. увеличился на 68, или 6,8 теоретической ошибки, а величина теоретической ошибки равна 0,3 м; следовательно, ошибка в отсчете дистанции равна 0,3 Х 6,8 -- 2,04 м. При дальности 6000 м и базе I м параллактический угол равен , а при дистанции в 6000л и базе 1 ж, 10 см параллактический угол равен О ,0,48. Таким образом, параллактический угол изменился на 3, а теоретическая ошибка дистанции возросла до 207 м. Поэтому и в первом случае ошибка дистанции выразится всего на 0,,1 лг, а во втором случае в 207 X 0,3 - 62 м.
Во втором случае тангенс параллактического угла при дистанции на 6 км увеличен в 700 раз (10 ел : 0,015 700),
Это исследование остается верным и для случая, когда зеркало РЗ ставится непосредственно перед объективом дальномера с одной оптической трубой (фиг. 22). Смысл этого исследования заключается в том, что передвижение зеркала Рг .можно произвольно увеличивать в несколько раз без ощутительной погрешности в определении дистанции, в тех случаях, когда тангенс параллактического угла представляет слишком малую величину, чтобы технически можно было выполнить передвижение зеркала РЭ на эту величину и так или иначе передать эту величину на вращение барабана для отсчета дистанции (фиг. 5 и 6). Например, при базе в 1 .и и дистанции в 6 км тангенс параллактического угла, на который надо передвинуть зеркало р2, для учета расстояния равен 0,015 мм. Так как технически трудно выполнить передвижение зеркала Р., на такую величину и передать ее вращением барабана или циферблатов (фиг. 5 и 6), то величину 0,015 можно увеличить произвольно, например, в десйть раз без ошибки в определении дистанции. Необходимо только обеспечить автоматический поворот зеркала Р, на половину парадлактического угла в тот момент, когда зеркало Р.,, пройдет соответствующий тангенс (удвоенный, утроенный или увеличенный в п раз). Этот поворот зеркала Pj, определяемый
совмещением в одно целое раздвоенных изображений в трубе, укажет, что зеркало Pg уже прошло соответствующий тангенс параллактического угла, т. е. укажет момент отсчета по циферблатам.
Для осуществления такого автоматического поворота зеркала Р служит зеркальный компенсатор (фиг. 5 и 6), схема устройства которого показана на фиг. 3. Он состоит из зеркала (призмы) Ра (фиг. 3) с рычагом DL (5 на фиг. 5), укрепленным на оправе к оси 3 (фиг. 5 и 6) под углом в 45° к плоскости зеркала.
Рычаг 5 прижимается пружиной б, укрепленной в оправе компенсатора к клину ABC (фиг. 3), который состоит из пластинки 8 (фиг. 5 и 6), имеющей уже соответствующий скос по одной стороне и передвигаемой в пазах 7 оправы компенсатора винтом 9 и лежащей выше пластинки 13, через которую проходит ось 3 зеркала 4, так что зеркало 4 и рычаг 5 находятся в пазах оправы компенсатора вперед и назад по линии оптической оси трубы, вращением бесконечного винта J4, проходящего через муфту /5а, сидящую на пластинке 13. Вращение винта 14, осуществляемое валиком 5 (фиг. 7 и 8) или кремальерой 6 (фиг. 9 и 10), передается на циферблаты 16 и 17 (фиг. 6) при помощи червячных или зубчатых передач. На циферблатах 16 и /7, по формуле
360 А -т
(где DI - наи.меньшая дистанция для данного аппарата, от- число оборотов винта 14, равное по ходу тангенсу параллактического угла DI н D - любая дистанция до цели), наносятся деления, соответствующие тангенсам параллактических углов различных дистанций.
Для того, чтобы зеркало Р,, пройдя длину тангенса параллактического угла определяемой дистанции, повернулось на половину параллактического угла, необходимо соблюсти закон соответствия длины рычага DL к углу клина ABC (фиг. 3). Этот закон заключается в том, что УГОЛ клина должен равняться половине наибольшего параллактического угла для данного аппарата, т. е. угла.
соответствующего наименьшему расстоянию, определяемому данным аппаратом, а длина рычага (фиг. 3) должна быть равна тангенсу наибольшего параллактического угла, соответствующему наименьшему расстоянию, при основании равном базе дальномера. Строго говоря, конец рычага DL, при движении вперед зеркала Pj, должен был бы описывать некоторую кривую линию, но при малых параллактических зтлах ее можно считать за прямую, без заметной для точности дальномера ощибки.
По причинам деформации трубы от температуры и других условий компенсатор первого рода (фиг. I), помещаемый на конце базы, применим для дальномеров с малой базой (фиг. 7 и 8), а компенсатор второго рода, т. е. помещаемый в начале базы и непосредственно перед объективом трубы (фиг. 2), применим для дальномеров с длинной базой, так как длина оптической трубы, с ко.мпенсатором впереди, по своей незначительности не даст большой ошибки по дальности, а ошибка вследствие длинной базы уничтожается установкой пентапризм на концах базы.
Формула для нанесения шкалы дистанций на циферблатах /6 и /7 (фиг. 6) выводится следующим образом. Пусть луч SAB (фиг. 4) падает от предмета, дистанция до которого будет наименьшей для данного дальномера, т. е. более близкие дистанции дальномер фиксировать не будет. Тогда угол а будет наибольшим параллактическим углом для аппарата, а СВ-наибольшим тангенсам, длину которого должно пройти зеркало Ра (фиг. 3), чтобы определить дистанцию до 5. Следовательно рычаг DL (фиг. 3) должен быть равен СВ, т. е. тангенсу наибольшего параллактического угла для данного аппарата, чтобы зеркало Ро при своем движении могло пройти всю длину тангенса а. Поэтому, длина рычага DL не может быть произвольной, но она может быть увеличена в я раз, как показано было выше, без заметной ошибки в определении дистанции. Из треугольников SAC и ВАС, которые подобны, имеем СВ : АС АС: CS, причем CS равно наименьшей дистанции D, взятой
(ЛОУпроизвольно. Отсюда имеем СВ ,
Луч от какой-нибудь другой точки 5 даст тангенс СЕ, который будет равен
СЕ д . Отсюда зеркало РЗ для учета
дистанции до S- должно пройти часть СВ (тангенс а), равную
СЕ(ЛСР (ЛС)2
СВ I) О,
Если ход винта 14 (фиг. 6) равен СВ (фиг. 4), то одного поворота циферблата 16 достаточно для прохождения зеркалом Pj длины СВ. Тогда для прохождения СЕ циферблат /6 достаточно повернуть на часть оборота, равную
)
Если же ход винта 14 будет равен -, т. е. для прохождения СВ необходимо сделать т оборотов циферблата /6,
i /,N 360 D, -т тогда формула (I) примет .
Если отношение шестерен циферблатов 16 и 17 будет -, то циферблат 16
будет фиксировать дистанции одного оборота винта 14, а циферблат 17 будет учитывать дистанции остальных т - 1 оборотов винта 14. Например, при т 1 и 100 м для дистанции в б км 360 100 „о ., .
имеем Л -боо6 километров X 9°, для 2 километров х 18, для 1 километра л:- 36 и для 100 ж X 360°. При D 100 м и m ..-20
„ 360 100 20 для дистанции в b км х -
120°. Для 4 км А- 180° и для 2 км л: 360°, т. е. полному обороту циферблата 16 (фиг. 6). Следовательно при 20 оборотах винта 74 один оборот циферблата 75 фиксирует расстояния от 6 до 2 км, а остальные 1900 м-от 2 км до 100 м фиксирует циферблат 77.
Клин 8 (фиг. 5) может быть сделан из вращающейся на шарнире пластинки 70 с укрепленным на ней плоским стеклом 77 и регулируемой BHHTOIM 72. поэтому техническое изготовление его не представляет затруднений. Шкала ди(анций наносится на основе математической формулы, а не подбором делени Наконец, вследствие возможности
рименения предлагаемого компенсатора
к одной прямой оптической трубе с одним объективом возможно построение дальномеров с одной оптической трубой с раздвоенными изображениями (фиг. 9) и дальномеров с двумя оптическими трубами (фиг. 10) по принципу бинокля, которые выигрывают в поле зрения и яркости изображения вследствие использования прямых не изломанных и поэтому более коротких труб. Кроме того, монокулярный дальномер с одною оптическою трубою (фиг. 9) дает нижнее изображение непосредственно трубе и только верхнее - путем отражения от базьг, поэтому ошибка по дальности в этом дальномере уменьг шится вдвое, выражаясь одной ошибкой компенсатора.
В стереоскопическом дальномере (фиг. 10) с прямыми трубами исчезают ошибки по дальности за поворот изображений в окулярных призмах - за отсутствием таковых. Эти ошибки изменяются или сливаются с ошибкой компенсатора.
Наводка дальномеров с одной оптической трубой (фиг. 9) и стереодальномеров с прямыми трубами (фиг. 10) на цель проще и точнее, чем в существующих дальномерах.
Применение предлагаемого призменного компенсатора к существующим дальномерам показано на фиг. 7 и 8. В обоих случаях двуклиновый вращающийся компенсатор, помещаемый непосредственно перед объективом внутренней трубы, заменен призменным компенсатором 7 и 2, помещенным на конце базы вместо пентапризмы и приводимым в движение валиком 3.
Выверка по высоте производится наклоном внутренней трубы валиком 5а, а выверка по дальности делается или подвим ным одноклиновым компенсатором 4 (при помощи валика 5) или, за отсутствием такового, увеличением или уменьшением угла CAB (фиг. 3) клина призменного компенсатора при помощи винта 72 (фиг. 5).
В дальномере с одной оптической трубой (фиг. 9) призма 7 компенсатора закрывает только верхнюю половину объектива и передает изображение от пентапризмы 3 на конце базы, а нижнее изображение получается через окно в
оправе компенсатора прямой наводкой трубы. Ошибка по высоте исправляется поворотом трубы вокруг оптической оси, а ошибка по дальности - или подвижным клином 5 (фиг. 9) или поворотом клина 2 компенсатора при помош.и винта 72 (фиг. 5). Поворот винта 4 для движения зеркала компенсатора производится рычагом или кремальерой 6 (фиг. 9).
Стереодальномер с прямыми трубами (фиг. 10) состоит из оправы //, в которой укрепляются прямоугольная призма или пентапризма 3 и призменный компенсатор / и 2 с циферблатами /(5 и 77 (фиг. 6) и передаточным механизмом, а внутри оправы 77 помещаются две прямых оптических трубы 7, укрепленные подвижно на принципе бинокля, с вращаюш,имися клиньями 5 и 9 для выверки по высоте и дальности.
В окулярах оптических труб имеются метки для совмепхения их с изображением по глубине.
Предмет изобретения.
Зеркальный компенсатор к дальномеру, снабженный направляющим клином, отличающийся тем, что направляющий клин 8 (фиг. 5) установлен неподвижно, а зеркало (призма) 4-с возможностью продвижения при одновременном его повороте, с помои1ью рычага 5, предназначенного скользить по наклонной плоскости клина в направлении оптической оси трубы дальномера и укрепленного на оси 5 зеркала 4 под углом в 45° к плоскости зеркала, причем длина рычага 5 пропорциональна тангенсу наибольшего параллактического угла, а уклон клина 8 равен половине этого угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моно статический оптический дальномер | 1930 |
|
SU24970A1 |
| Оптический дальномер | 2017 |
|
RU2662029C1 |
| Оптико-электронный пассивный дальномер | 2019 |
|
RU2721096C1 |
| СИСТЕМА НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2189065C2 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
| Клиновой дальномер двойного изображения с телескопическим микрометром | 1959 |
|
SU125897A1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
| Дальномер двойного изображения | 1955 |
|
SU104471A1 |
| ПРИЦЕЛ НА ВНУТРЕННЕЙ БАЗЕ | 2016 |
|
RU2638625C2 |
| СТЕРЕОТАХЕОМЕТР | 1972 |
|
SU352124A1 |
(|)иг

