2. Устройство no п. 1, отли чающееся тем, что, с целью отсчета целых величин интервалов и повьшения точности фотоэлектричес кой инда1кации путем уменьшения скор ти подхода проекции штриха к индика тирующим фоторезисторам, в блоке фоторезисторов установлен путевой фоторезистор прямругольной формы, большая сторона которого параллельна проекции штриха. 7 3. Устройство по пп. 1 и 2, отличающееся тем, что, с целью предотвращения появления ложного сигнала от случайных оптических помех, teждy индикатирующими фоторезисторами и путевым фоторезистором расположен блокирующий фоторезистор прямоугольной формы, большая сторона которого параллельна проекции штриха, а зазор между ним и путевым фоторезистором больше ширины проекции штр1сха.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления металлорежущими станками с экранной оптикой | 1960 |
|
SU137374A1 |
| Трехканальный фотоэлектрический микроскоп | 1971 |
|
SU498591A1 |
| Датчик перемещений | 1968 |
|
SU395023A1 |
| КОДОВЫЙ ТЕОДОЛИТ | 1971 |
|
SU302599A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕЩЕНИЙ | 1971 |
|
SU304430A1 |
| Устройство для автоматического управления процессом установки координат исполнительного органа станка | 1985 |
|
SU1310169A1 |
| ОПТИЧЕСКАЯ СИСТЕМА ВИЗИРОВАНИЯ | 1969 |
|
SU241741A1 |
| Устройство для измерения линейныхРАзМЕРОВ (ЕгО ВАРиАНТы) | 1979 |
|
SU827972A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2057286C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА ПОВЕРХНОСТИ | 2013 |
|
RU2548575C2 |
1.01ТГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕ11ЩШ1Й, включающее эталонную штриховую меру, установлен- нур на подвижном органе, проектируемую оптической системой в измерительную плоскость, в. которой расположена каретка с индексом, перемещае- №iiM вдоль экрана посредством микрометрического винта с отсчетом дробных значений измеряемого интервала, отличающееся тем, что, с целью автоматического позиционирования подвижного органа и дублирования его визуальным отсчетом, на каретке установлен блок зависимо расположен1л>&1х фоторезисторов, два из которых - индикатирукщие - электрически соединены между собой по дифференциальной схеме и расположены с зазором параллельно друг другу и проекции штриха, причем зазор расположен на одной прямой с просветом индекса, а по линии зазора инди- катирующих фоторезисторов расположен выявительньиЧ фоторезистор.i(Л^со со •^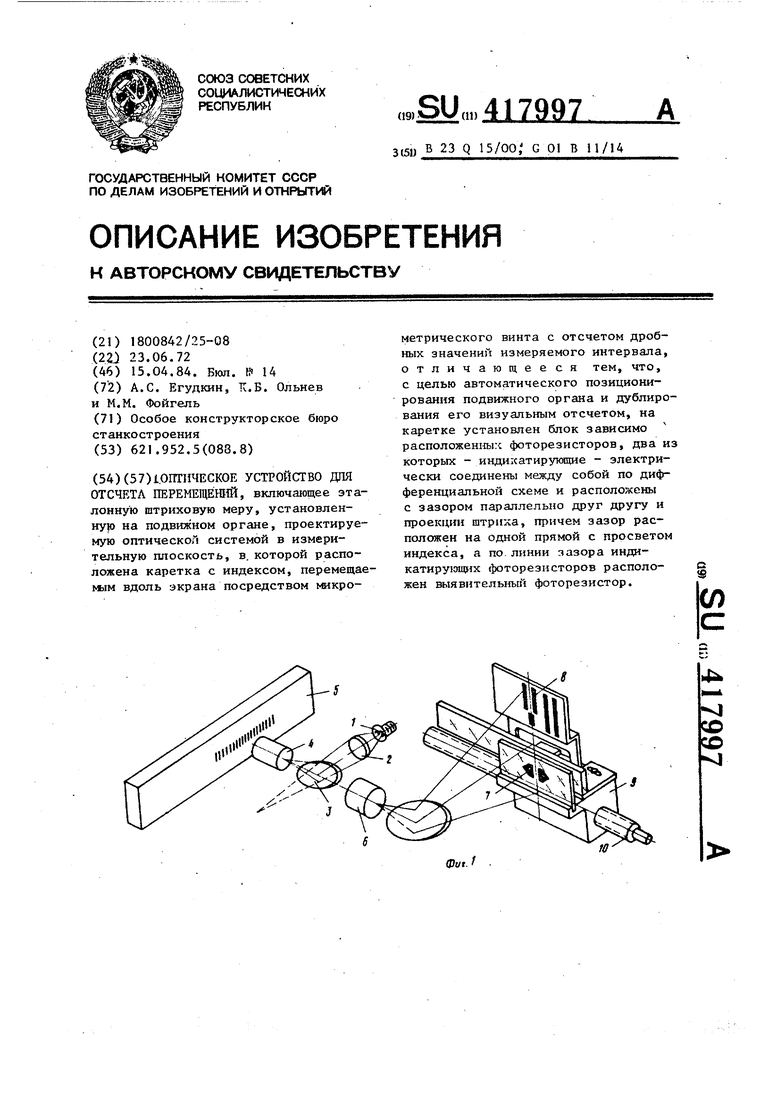
Изобретение относится к области станкостроения, а именно к оптическому устройству для отсчета перемещений штриха меры путем автоматического позиционирования при сохранении визуального отсчета по экрану, например, подвижных органов металлорежущих станков, машин и приборов.
Известно оптическое устройство дл отсчета перемещений, в котором визуальный отсчет по экрану осуществляется путем совмещения подвижного индекса с проекцией штриха в измерительной плоскости. Это устройство . обеспечивает высокую точность отсчета путем визуальной индикации, но не позволяет автоматически позиционировать подвижный орган.
Цель изобретения - обеспечение возможности автоматического позицийнирования подвижного органа и дублирования его визуальным отсчетом. Эта цель достигается тем, что с индексом жестко связаи блок, состоя рщй из ряда фоторезисторов, формирующих электрические сигналы для системы управления движением подвижного органа.
На фиг. 1 изображена схема оптического устройства; на 4иг. 2 - блок фоторезисторов.
Источник 1 света расположен перед коллектором 2. Полупрозрачное зеркало 3 расположено по ходу луча перед объективом 4. В предметной плоскости находится штриховая- мера 5. За объективом 4 установлен проекционный окуляр 6 зеркало за окуляром введено
в схему для наглядности), В картинной плоскости окуляра 6, которая является и плоскостью измерения, находится индекс 7 и закрепленный н нем блок 8 фоторезисторов. Индекс и блок связаны с гайкой 9, сидящей на микрометрическом винте 10. ФОторезисторы блока вклктчены в известную электронную автоматическую систему управления (на чертеже не показана).
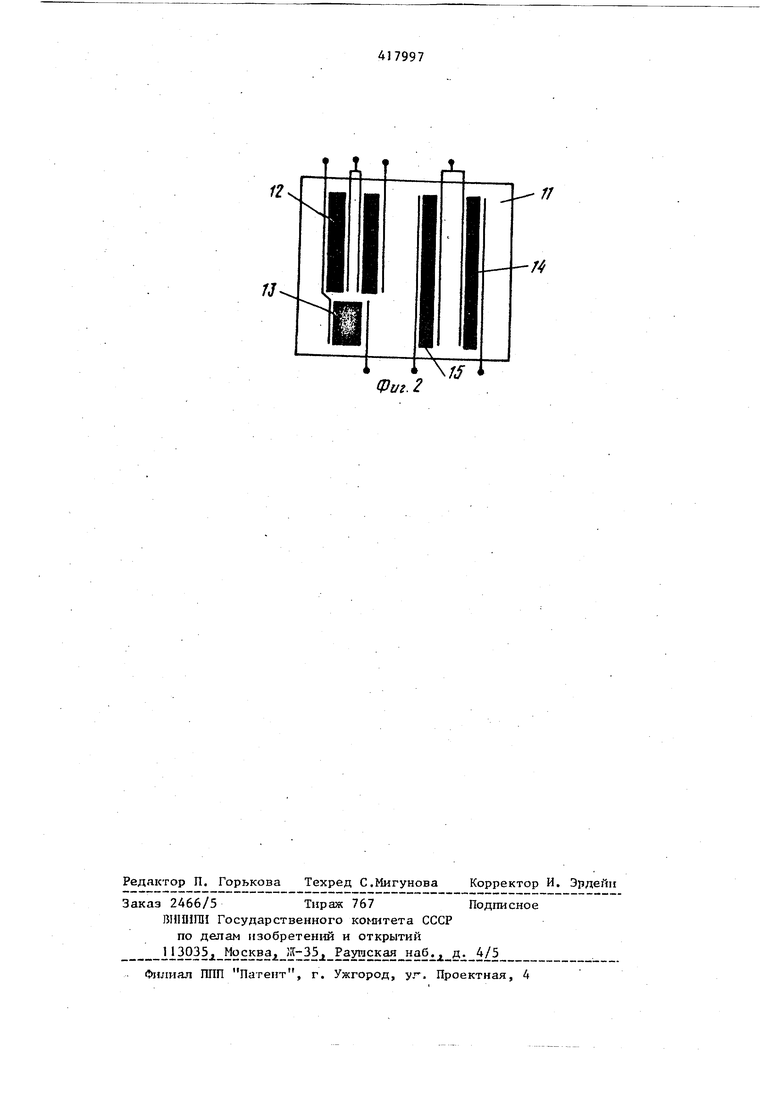
Блок фоторезисторов содержит подложку I1, на которую нанесены чувствительные слои-фОторезисторы.
Слой 12 составляют дифференциальную пару индикатирующих фоторезисторов прямоугольной формы, расположеных с зазором параллельно-друг даугу и проекции штриха. Зазор между индикатирующими фоторезистораида соосен и параллелен просвету индею- са 7. Ширина индикатируюцих фоторезисторов равна ширине проекции штриха, а зазор между ними, по условиям технологии нанесения фоточувствительных слоев и расположению электродов, не может быть меньше 0,1-0,15 мм. Оба слоя 12 электрически соединены по дифференциальной схеме. Слой 13 является выявительным фоторезистором и расположен по линии зазора, образованного индикатирующими фоторезисторами. Форма этого фоторезистора прямоугольная, с параллельным расположением больше стороны проекции штриха и шириной, равной последнему. 3 Слой 14 является путевым фоторезистором прямоугольной формы с расположением большей стороны параллель но проекции штриха и по ширине, равной этой проекции. Расстояние между этим фоторезистором и индикатирующиг фоторезисторами 12 назначается в результате расчета, в котором учитывахггся динамические характеристики подвижного органа, вид и динамические характеристики электропривода быстродействие схемы управления скоростями перемещения подвижного органа, увеличение оптической системы и допустимая погрешность фотоиндикации. Практически это расстояние соответствует 0,1-0,2 измеряемого интервала. Спой 15 является блокируюпц м фоторезистором, равным по форме и размерам путевому фоторезистору 14. Зазор между этим фоторезистором и путевым фоторезистором превьшает ширину проекции штриха на величину порядка 0,1 этой ширины. Все фотореэисторы нанесены на электроизоляционную подпожку. К каждому слою подведены электроды с вывoдa м наружу корпуса блока. В зависимости от условий перемещения подвижного органа фотор зисторы 14 и 15 могут располагаться с одной или с двух сторон от фоторези торов 12. Источник 1 света посредством кол лект4}ра 2 и полупрозрачного зеркала 3через объектив 4 освещает поверхность штриховой меры 5. Изображение штрихов меры посредством объектива 4и окуляра 6 проецируется в плоскость измерения, в которой посредством микрометрического винта 10 пере мещаются индекс 7 и блок фоторезист ров 8 на величину дробного значения измеряемого интервала. Привод микро метрического винта может быть ручны или от электродвигателя. Отсчет величины ,этого перемещения может быть осуществлен по или электрическим путем посредством датчиков. По ходу перемещения подвижного органа с закрепленной штриховой мерой проекция штриха в плоскости измерения должна совместиться в перву 4 очередь с путевым фоторезистором 14 (см. фиг. 2 I. Сигнал, поступающий от этого фоторезистора в электронную систему управления движением подвижного органа, может быть использован для счета числа целых интервалов меры и как сигнал к уменьшению скорости с целью доведения ее до оптимальной, обеспечивакяцей требуемую точность фотоэлектрической индикации фоторезисторами 12. Дальнейшее перемещение проекции штриха приводит к ее совмещению с блокировочным фоторезистором 15. Сигнал от этого фоторезистора может быть также использован для счета целых интервалов меры, что соответственно повьш1ает надежность этой операции. Цругое назначение .этого фоторезистора заключается в том, чтобы выявить случайную помеху в виде пятна или риски, которые могли бы выдать ложный сигнал при совмещении с индикатирующими фоторезисторами 12. С этой целью расстояние между фоторезисторами 15 и 14 задается с некоторым превьш1ением ширины проекции, штриха. При прохождении помехи размером большим, чем просвет между этими фоторезисторами, в схему управления поступают одновременно сигналы от обоих фоторезисторов, что соот-. ветствует аварийной ситуации. ДО момента изменения скорости перемещения подвижного органа, вызванного совмещением проекции штриха заданного номера с фо.торезистором 14, электрическая схема фоторезисторов 12 и 13 выключена совсем. Поэтому на фоторезистор 15 возлагается функция включения схемы фоторезисторов 12 и 13. При включении фоторезисторов 12 в схему управления поступает сигнал от фона, соответствующий сигналу от проекции штриха. Это обусловливается дифференциальной схемой включения фоторезисторов 12, при которой равенство уровней сигналов с обоих слоев соответствует полезному сигналу. С целью исключения подобного явления сигнал от фоторезисторов 12 воспринимается как полезный только при условии совмещения проекции штриха с фоторезистором V3.
Фиг. 2
