113
Изобретение относит.я к станкостроению и может быть использовано для автоматического управления процессом установки координат исполнительных органов (рабочих узлов) прецизионных станков с ЧПУ (координат- но-расточных, координатно-шлифоваль- ных и др.).
Целью изобретения является повышение точности установки координат подвижных исполнительных органов прецизионных станков с ЧПУ, а следовательно, и точности межцентровых расстояний отверстий в обработанных на станке деталях за счет уменьшения (или исключения) величины смещения исполнительных органов при их закреплении (д
за к
)
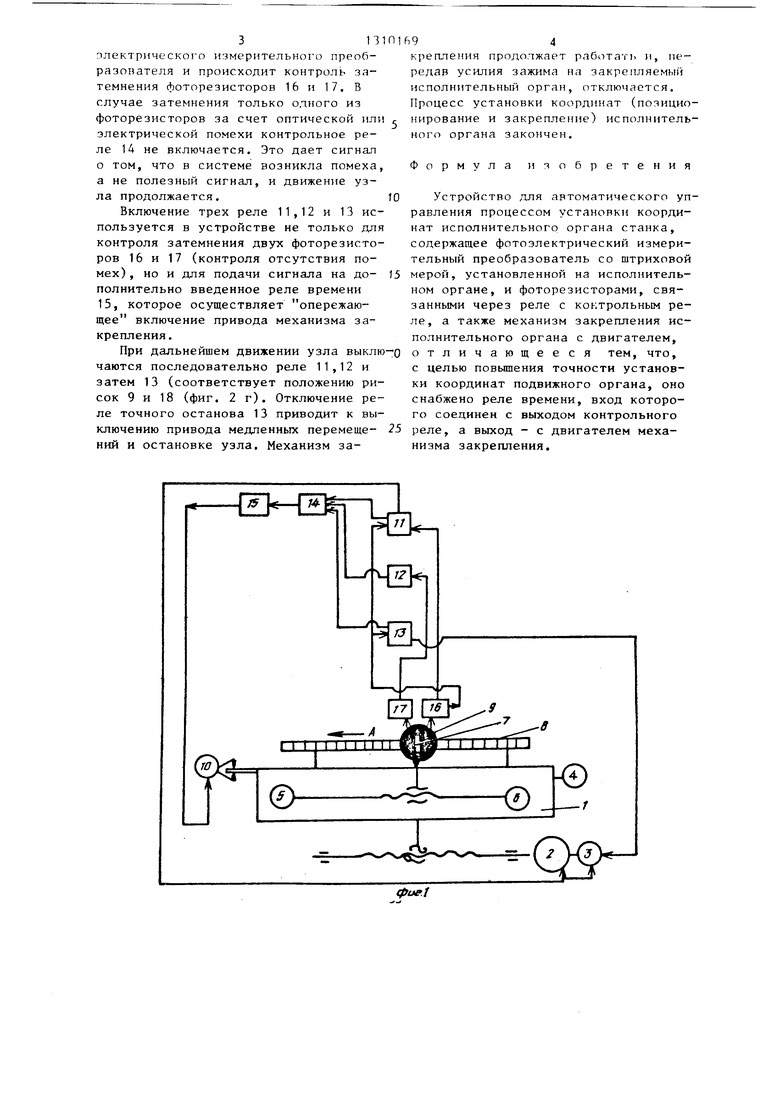
На фиг.1 изображена структурная схема устройства управления , на фиг.2 - положение проекций рисок штриховой меры оптической отсчетно- измерительной системы станка с ЧПУ относительно фоторезисторов фотоэлектрической головки измерительного преобразователя линейных перемещений исполнительного органа в процессе его точного позиционирования.
Устройство управления процессом установки координат исполнительного органа 1 станка с ЧПУ содержит приводные двигатели 2 и 3, отсчетно-измери- тельную систему с блоком сельсинов грубого отсчета 4, двигатель 5, блок сельсинов точного отсчета 6, фотоэлектрическую головку 7 измерительного преобразователя со штриховой мерой 8 с миллиметровыми рисками 9, двигатель 10 привода механизма закрепления исполнительного органа, реле 11, 12 и 13, контрольное реле 14 и реле времени 15, два фоторезистора 16 и 17, реагирующие на перекрытие их основной риской 9 и вспомогательной риской 8 на штриховой мере.
Устройство работает следующим образом.
Установка дробной части координатного размера - точный отсчет заключается в перемещении фотоэлектрической головки 7 от двигателя 5 относительно экрана оптической системы. Установка фотоэлектрической головки происходит до начала.перемещения исполнительного органа 1 и контролируется блоком сельсинов точного отсчета 6. После того, как фотоэлектрическая головка 7 займет положение, соответ01692
ствующее заданному на перфоленте устройства ЧПУ значению дробной части координатного размера, двигатель 5 отключается. Так осуществляется под- 5 готовка дробной части координаты для установки исполнительного органа. Затем автоматически включается двигатель 2 перемещения исполнительного органа 1, положение которого сначала
10 контролируется блоком сельсинов грубого отсчета 4, а после того, как исполнительный орган приблизится к заданному размеру на расстояние 0,5- 0,2 мм, управление перемещением пере15 дается фотоэлектрической головке 7 измерительного преобразователя, фиксирующей положение риски 9 на экране оптической отсчетно-измерительной си темь:.
20 Процесс позиционирования подвижного исполнительного органа разбивается на следующие этапы: перемещение рабочего органа на максимальной скорости, снижение скорости до 800 мм/мин; снижение скорости до 50- 100 мм/минj снижение скорости до 30 мм/мин после окончания контроля перемещения по блокам сельсинов грубого отсчета и передача управления
30 движением на фотоэлектрическую головку измерительного преобразователя. Далее исполнительный орган движется (направление движения по стрелке А) с постоянной скоростью порядка
35 30 мм/мин от основного двигателя 2 привода перемещения.
Как только проекция вспомогательной риски 18 (фиг.2 а) на штриховой мере, нанесенной от основной (милли40 метровой) риски 9 на расстоянии
80 мкм, проходит под фоторезистором 16, кратковременно включается реле
11,отключающее основной двигатель
2 перемещения узла и включающее дви- 45 гатель медленных перемещений 3. Узел перемещается со скоростью 0,5- 1,0 мм/мин. При движении узла наступает момент, когда вспомогательная риска 18 закрывает фоторезистор 17 50 (фиг,2 б). При этом включается реле
12.Движение продолжается и в момент когда основная риска 9 начинает закрывать фоторезистор 16 (фиг.2 в), включается реле точного останова 13
55 и реле 11. При этом включается контрольное реле 14, которое становится на самоблокировку. В это время включены все три реле 11,12 и 13 фото3131
электрического нгзмерительного преобразователя и происходит контроль затемнения фоторезисторов 16 и 17. В случае затемнения только одного из фоторезисторов за счет оптической или электрической помехи контрольное реле 14 не включается. Это дает сигнал о том, что в системе возникла помеха, а не полезный сигнал, и движение узла продолжается.
Включение трех реле 11,12 и 13 используется в устройстве не только для контроля затемнения двух фоторезисторов 16 и 17 (контроля отсутствия помех) , но и для подачи сигнала на дополнительно введенное реле времени 15, которое осуществляет опережающее включение привода механизма закрепления.
При дальнейшем движении узла выклю чаются последовательно реле 11,12 и затем 13 (соответствует положению рисок 9 и 18 (фиг. 2 г). Отключение реле точного останова 13 приводит к выключению привода медленных перемещений и остановке узла. Механизм заnif,94
крепления продолжает работать и, передав усилия зажима на закрепляемый исполнительный орган, отключается. Процесс установки координат (позициог нирование и закрепление) исполнительного органа закончен.
Формула изобретения
Устройство для автоматического управления процессом установки координат исполнительного органа станка, содержащее фотоэлектрический измерительный преобразователь со штриховой
мерой, установленной на исполнительном органе, и фоторезисторами, связанными через реле с контрольным реле, а также механизм закрепления исполнительного органа с двигателем,
отличающееся тем, что, с целью повышения точности установки координат подвижного органа, оно снабжено реле времени, вход которого соединен с выходом контрольного
реле, а выход - с двигателем механизма закрепления.
.-s.x,.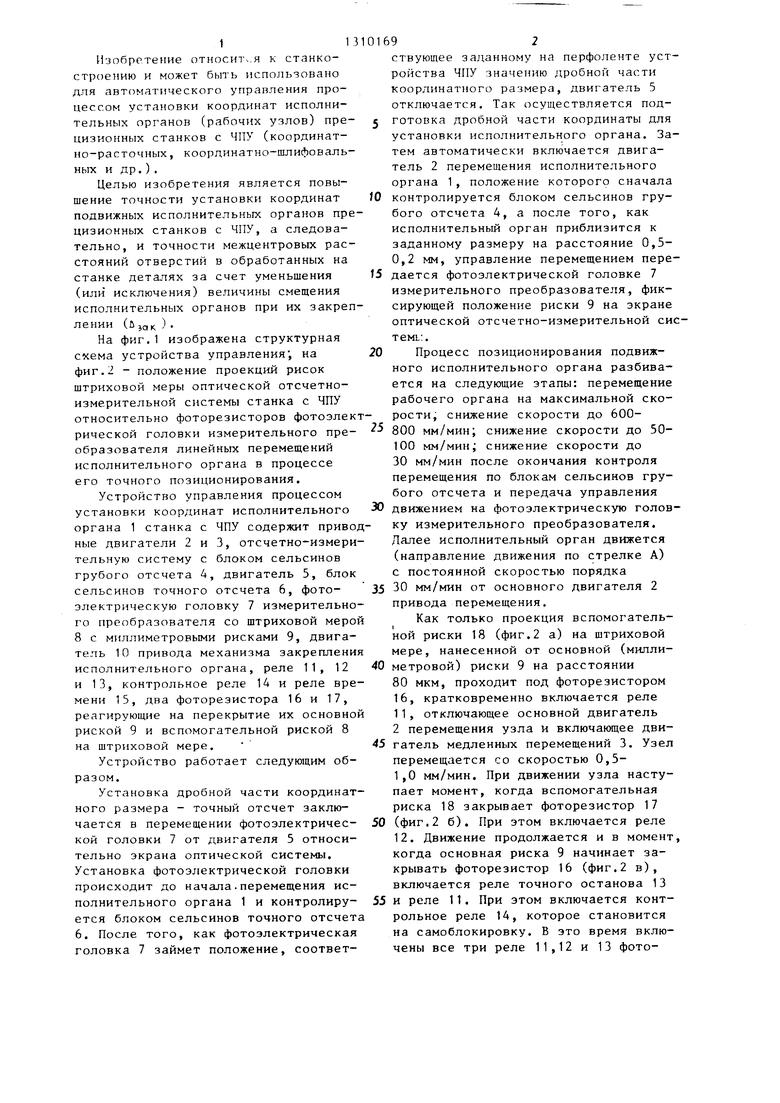
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для координирования рабочихОРгАНОВ МЕТАллОРЕжущиХ CTAHKOB | 1977 |
|
SU818821A1 |
| Оптическое устройство для отсчета перемещений | 1972 |
|
SU417997A1 |
| Фотоэлектрический микроскоп | 1976 |
|
SU587322A1 |
| Способ активного управления станком и устройство для его осуществления | 1985 |
|
SU1278181A1 |
| Способ позиционирования металлорежущего инструмента | 1981 |
|
SU1024225A1 |
| Фотоэлектрическое устройство для автоматического измерения перемещений | 1976 |
|
SU657242A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ИСПОЛНИТЕЛЬНОГО ОРГАНА МАШИНЫ С ЧПУ | 1988 |
|
RU2009764C1 |
| СПОСОБ НАСТРОЙКИ МНОГОЦЕЛЕВОГО СТАНКА ДЛЯ ПЯТИКООРДИНАТНОЙ ОБРАБОТКИ | 2014 |
|
RU2571984C1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ С ЧПУ | 1995 |
|
RU2092292C1 |
Изобретение относится к станкостроению и предназначено для установки координат исполнительных органов станков. Цель изобретения - повышение точности установки за счет того, что обеспечивается опережающее включение привода механизма закрепления, что позволяет исключить влияние возмущений, возникающих во время его включения, на точность позиционирования. Устройство содержит фотоэлектрический измерительный преобразователь с фоторезисторами, контрольное реле, связанное через реле времени с двигателем механизма закрепления. 2 ил. 05 СО
| Кашепава М.Я | |||
| и др | |||
| Современные отечественные и зарубежные координат- но-растрчные станки | |||
| М., 1973, с.125- 128. |
