1
Изобретение относится к области измерительной техники и предназначено, в частности, для определения координат центра тяжести изображения плоской фигуры или совокупности плоских фигур вне зависимости от наличия пустот в фигуре (фигурах). Определение координат центра тяжести изображения плоской фигуры используется при опознавании образов и в ряде других областей техники.
Известны устройства для определения координат центра тяжести изображения плоской однородной (без внутренних пустот) фигуры. В этих устройствах датчиком видеосигнала является телевизионная система со следящей разверткой, луч которой перемещается продвигающим и управляющим блоками. Координаты луча, прослеживающего контур однородной фигуры, подаются на квадраторы, с выходов которых попадают на амплитудные модуляторы, на которые подаются также синусоидальные и косинусоидальные составляющие опорного напряжения продвигающего блока следящей развертки.
Однако с помощью известных устройств невозможно определить координаты центра тяжести совокупности фигур, а также фигур с внутренними пустотами; определение координат центра тяжести требует дополнительных вычислений; использование следящей развертки требует специального датчика видеосигнала, затрудняющего визуальный контроль пространства анализируемого кадра и усложняющего осуществление визуального контроля найденного местоположения центра тяжести фигуры.
Целью изобретения является определение центра тяжести изображений плоских фигур, содержащих пустоты, либо совокупности фиГУРЭто достигается тем, что в предлагаемом
устройстве выход телевизионного датчика через ключ подключен к интеграторам каналов X и У, вторые входы которых через соответствующие коммутаторы одновременно подключепы к выходам блока управления, синхрогенератора и генератора диафрагмирующих сигналов, выход последнего также подключен к ключу и смесителю, второй вход которого соединен с выходом телевизионного датчика, а
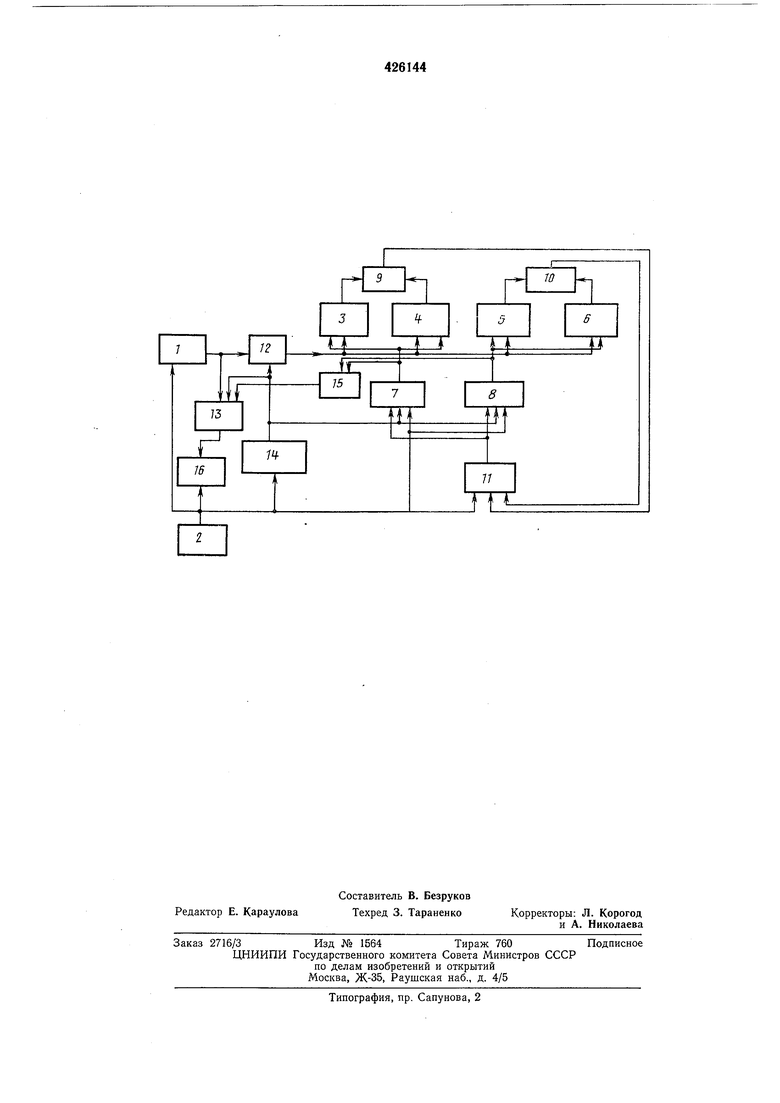
третий вход через схему совпадения - к выходам коммутаторов каналов X и У, а выход смесителя подключен к видеоконтрольному устройству. На чертеже изображена схема предлагаемого телевизионного устройства для определения центра тяжести изображений плоских фигур.
Устройство содержит телевизионный датчик 1, синхрогенератор 2, два канала определения
координат центра тяжести - канал определения координат Хц и канал определения координат Уц.т, каждый из которых состоит из двух блоков интеграторов 3, 4, (5, 6), коммутатора
7(8) и компаратора 9 (10), блок управления
11, ключ 12, смеситель 13, генератор 14 диафрагмирующих сигналов, схему совпадения 15 и видеоконтрольное устройство 16.
Предлагаемое устройство работает следующим образом.
Рассмотрим работу канала определения Уцт. С началом развертки кадра - развертка для упрощения пояснений предполагается прогрессивной - коммутатор 8 в момент начала второй строки растра выключает блок интегратора 5 и включает блок интегратора 6.
8блоке интегратора 5 до второй строки формируется, начиная с момента начала кадра, падающее пилообразное напряжение, а с момента начала второй строки растра в блоке интегратора 6 начинает формироваться парастающее пилообразное напряжение. При этом видеосигнал, поступающий с телевизионного датчика 1, в момент своего существования подключает пилообразное напряжение к интегратору 5 (на первой строке), а со второй строки и на всех остальных строках растра видеосигнал подключает пилообразное напряжение к интегратору в блоке интегратора 6. Если к концу сканирования кадра напряжения на интеграторах 5 и 6 в блоках не равны, или напряжение в блоке интегратора 6 больше напряжения в блоке интегратора 5, то в следующем кадре коммутатор 8 переключает блоки интеграторов 5 и 6 в начале третьей строки, и процесс вновь повторяется. В каждом кадре блоки интеграторов 5 и 6 переключаются в начале строки, порядковый номер которой на единицу больше порядкового номера той строки предыдущего кадра, во время которой переключались блоки интеграторов 5 и 6. Это происходит до тех пор, пока напряжения на интеграторах 5 и .6 блоков не станут равными либо напряжение интегратора 6 в блоке не станет меньше напряжения интегратора 5 в блоке. Этот момент соответствует условию, когда коммутация блоков интеграторов 5 и 6 происходит на строке, на которой расположен центр тяжести изображения. При этом происходит остановка коммутатора 8 по команде блока управления И, и номер строки, на которой произошла остановка, высвечивается на цифровых лампах.
Аналогично происходит поиск координаты Хц.т. коммутатор 7 с началом строки подключает блок интегратора 3, в котором формируется падающее пилообразное напряжение. Это напрялсение подключается к интегратору этого блока появляющимися в процессе сканирования видеосигналами телевизионного датчика 1.
В некоторый, дискретный момент времени XK коммутатор 7 выключает блок интегратора
3 и включает блок интегратора 4, в котором формируется нарастающее пилообразное напряжение, подключаемое видеосигналами датчика 1 к интегратору этого блока. В каждом следующем кадре значение к момента переключения блоков интеграторов увеличивается на единицу,, сдвигаясь по строке вправо до тех пор, пока не будет равенства напряжений блоков интеграторов 3 и 4, либо напряжение блока интегратора 4 не станет меньше напряжения блока интегратора 3. Это соответствует равенству .
Для процесса селекции объектов в кадре и индицирования местоположения центра тяжести фигуры на экране вводится ключ 12, смеситель 13, генератор 14 диафрагмирующих сигналов, схема совпадения 15, видеоконтрольное устройство 16.
Объекты селектируются путем стробирования видеосигнала, осуществляемого сигналами генератора 14 диафрагмирующих сигналов с помощью ключа 12. Для наблюдения за положением селектирующей рамки и совокупности объектов кадра видеосигналы с выхода телевизионного датчика 1 и генератора 14 диафрагмирующих сигналов подаются на смеситель 13 и с него на вход видеоконтрольного устройства 16. Индицирование местоположения найденного центра тяжести изображения осуществляется с помощью схемы совпадения 15, выход которой подключен к смесителю 13, а на вход подаются импульсы совпадения текущего местоположения сканирующего луча с координатами Хц.т. и Уц.т, хранимыми в коммутаторах 7 и 8.
Предмет изобретения
Телевизионное устройство для определения центра тяжести изображений плоских фигур, содержащее телевизионный датчик, синхрогенератор, блок управления, видеоконтрольное ycipoHCTBO, каналы X и У, каждый из которых состоит из интеграторов, выходы которых через компаратор подключены к общему блоку управления, отличающееся тем, что, с целью определения центра тяжести изображений плоских фигур, содержащих пустоты, либо совокупности фигур, выход телевизионного датчика через ключ подключен к интеграторам каналов X и У, вторые входы которых через соответствующие коммутаторы одновременно подключены к выходам блока управления, синхрогенератора и генератора диафрагмирующих сигналов, выходом подключенного также к ключу и смесителю, второй вход которого подключен к выходу телевизионного датчика, а третий вход через схему совпадения - к выходам коммутаторов каналов X и У, а выход смесителя подключен к видеоконтрольному устройству.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Устройство компенсации смазывания изображения | 1983 |
|
SU1126189A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕНТРА ЗВЕЗДЫ | 1991 |
|
RU2019061C1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВИДЕОСИГНАЛА | 1992 |
|
RU2042203C1 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1980 |
|
SU995377A1 |
| Магнитотелевизионный дефектоскоп | 1985 |
|
SU1275283A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| Система магнитной записи и воспроизведения телевизионных сигналов | 1980 |
|
SU995375A1 |
| СИСТЕМА ИНДИКАЦИИ АВИАЦИОННОГО ОБЗОРНО-ПРИЦЕЛЬНОГО КОМПЛЕКСА | 1994 |
|
RU2112212C1 |
| Устройство для определения координат точек по аэроснимкам | 1985 |
|
SU1278579A1 |