Изобретение относится к фотограмметрии, а именно к устройствам для дешифрирования, автоматизированного считывания и выдачи в ЭВМ матриц навигационных данУстройство работает следующим образом.
Аэроснимок с внечатанными матрицами навигационных данных (кодограммами) размещают на нросмотровом столе 1 и произных и измерения и выдачи в ЭВМ коор- водят его дешифрирование. После чего со
динат точек аэроснимков в процессе онре- деления координат объектов.
Цель изобретения - повышение производительности труда путем сокращения времени определения координат точек.
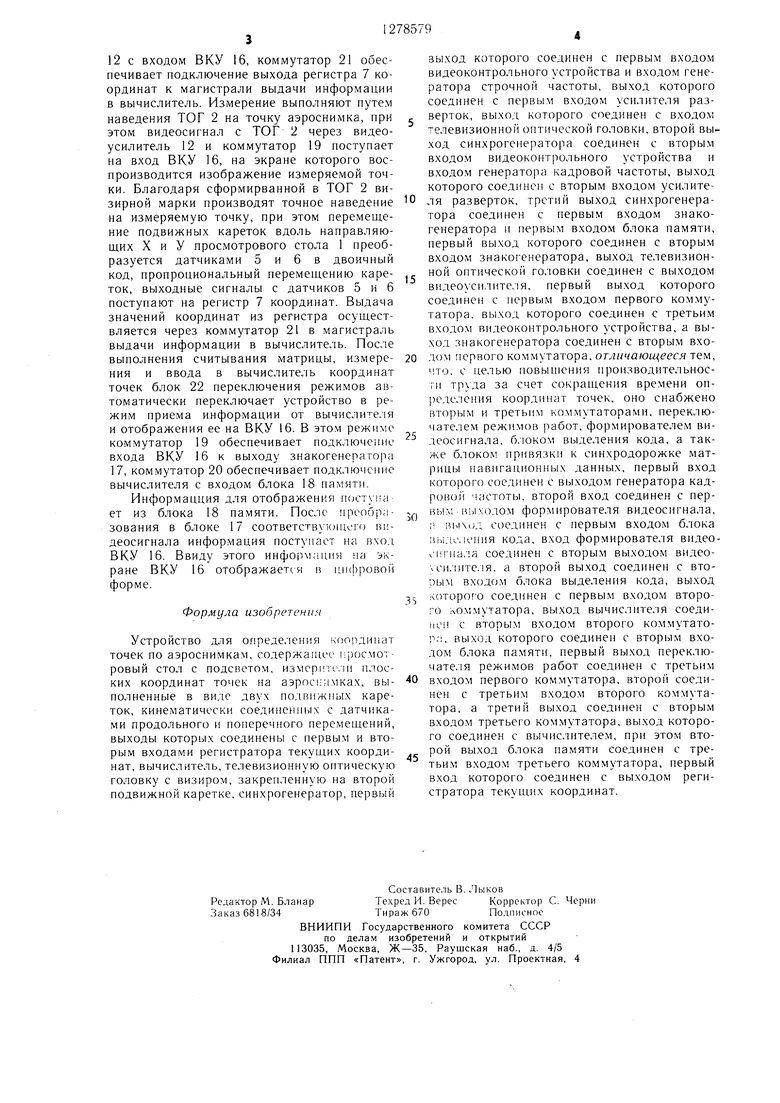
На чертеже изображена схема устройства.
Устройство для определения координат точек но аэроснимка.м содержит просмотснимка считывают закодированные в виде матрицы двоичного кода навигационные данные. Для этого устройство переводят в режим считывания матриц навигационных дан ных при помощи блока 22 переключения 10 режимов. В этом режиме коммутатором 20 обеспечивается связь выхода блока 14 выделения кода, с входом блока 18 памяти, коммутатором 19 обеспечивается связь выхода видеоусилителя 12 с входом видеоконтровой стол 1 с подсветом, подвижную те- рольного устройства 16, коммутаторо.м 21
leвизиoннyю голвку (ТОГ) 2 с визирным приспособлением, закрепленную на одной из двух подвижных кареток 3 и 4, связанных с датчиками продольного 5 и поперечного 6 перемещений, выходы которых подобеспечивается подключение первого выхода блока 18 памяти к магистрали выдачи информации в вычислитель. При считывании матрицы навигационных данных пере.ме- щают телевизионную оптическую головку 2
ключены на вход регистратора 7 текущих 20 вместе с каретками 3 и 4 и наводят ее на
координат, синхрогенератор о, первый и второй выходы которого соединены с входами генераторов пилообразного напряжения строчной частоты 9 и кадровой частоты 10, подключенных к усилителю 11 разверток, выход которого соединен с входом ТОГ 2, видеоусилитель 12, вход которого соединен с выходом ТОГ 2, а один из выходов - с входом формирователя 13 видеосигнала, один выход которого подключен на вход
изображение матрицы на аэрофильме. Выходной сигнал с ТОГ 2 подается на видеоусилитель 12 и затем на формирователь 13 видеосигнала, где он усиливается и преобразуется в дискретные логические уровни.
Усиленный видеосигнал поступает через коммутатор 19 на видеоконтрольное устройство 16, на экране которого воспроизводится изображение считывае.мой кодограммы, а логический сигнал - на блок 15 приблока 14 выделения кода, а другой - на вязки к синхродорожке матрицы, а также -
один из входов блока 15 привязки к синхродорожке матрицы навигационных данных, другой вход которого соединен с выходом генератора пилообразного напряжения кадровой частоты 10, а выход блока прина блок 14 выделения кода. Синхрогенератор 8 вырабатывает синхроимпульсы, которые подаются соответственно на генераторы пилообразного напряжения строчной 9 и кадровой 10 частоты, ВКУ 16 и блок 18 павязки подключен к второму входу блока ,5 мяти. Для обеспечения выделения кода из
видеосигнала используется блок 15 привязки к синхродорожке матрицы, вырабатывающий стробирующие импульсы в момент времени, соответствующий середине импульсов. В составе видеосигнала, сформированного при
14 выделения кода, видеоконтрольное устройство (ВКУ) 16, два из трех входов которого соединены с выходами синхрогенерато- ра 8, знакогенератор 17, один из входов которого соединен с третьим выходом синхрогенератора 8, а другой - с выходом бло- 40 считывании кодограммы, и.меются и.мпульсы, ка 18 памяти, один из входов которого под-соответствующие синхродорожке и информа45
ключен к третьему выходу синхрогенератора 8, первый коммутатор 19, выход которого подключен к третьему входу ВКУ 16, а два из трех входов подключены к второму выходу видеоусилителя 12 и выходу знакогенератора 17, второй коммутатор 20, один вход которого подключен к выходу блока 14 выделения кода, второй вход - к магистрали обмена с вычислителем (не показан), а
выход - к второму входу блока 18 памяти, eg
третий коммутатор 21, установленный на входе магистрали обмена с вычислителем и подключенный одним своим входом к выходу регистра 7, вторым входом - к второму выходу блока 18 памяти, а третьим - к выционным дорожкам, приче.м импульсы, относящиеся к разным дорожкам, имеют разную задержку относительно строчных синхроимпульсов, что используется для их разделения в блоке 14 выделения кода, с выхода которого считанные коды, соответствующие различным информационным дорожка.м, подаются через коммутатор 20 в блок 18 памяти. Выдача навигационных данных из блока 18 памяти в .магистраль обмена вычислителя производится через коммутатор 21. Затем производят автоматизированное измерение и выдачу в .магистраль обмена вычислителя значений координат интересующих точек аэроснимка. Для этого прибор
ходу блока 22 переключателя режимов рабо-55 переводят в режим считывания координат
ты устройства, два других выхода котороготочек при помощи блока 22 переключения
подключены соответственно на третьи входырежимов. В этом режи.ме коммутатор 19
коммутаторов 19 и 20.обеспечивает связь выхода видеоусилителя
Устройство работает следующим образом.
Аэроснимок с внечатанными матрицами навигационных данных (кодограммами) размещают на нросмотровом столе 1 и произснимка считывают закодированные в виде матрицы двоичного кода навигационные данные. Для этого устройство переводят в режим считывания матриц навигационных дан ных при помощи блока 22 переключения режимов. В этом режиме коммутатором 20 обеспечивается связь выхода блока 14 выделения кода, с входом блока 18 памяти, коммутатором 19 обеспечивается связь выхода видеоусилителя 12 с входом видеоконтобеспечивается подключение первого выхода блока 18 памяти к магистрали выдачи информации в вычислитель. При считывании матрицы навигационных данных пере.ме- щают телевизионную оптическую головку 2
изображение матрицы на аэрофильме. Выходной сигнал с ТОГ 2 подается на видеоусилитель 12 и затем на формирователь 13 видеосигнала, где он усиливается и преобразуется в дискретные логические уровни.
Усиленный видеосигнал поступает через коммутатор 19 на видеоконтрольное устройство 16, на экране которого воспроизводится изображение считывае.мой кодограммы, а логический сигнал - на блок 15 прина блок 14 выделения кода. Синхрогенератор 8 вырабатывает синхроимпульсы, которые подаются соответственно на генераторы пилообразного напряжения строчной 9 и кадровой 10 частоты, ВКУ 16 и блок 18 па
ционным дорожкам, приче.м импульсы, относящиеся к разным дорожкам, имеют разную задержку относительно строчных синхроимпульсов, что используется для их разделения в блоке 14 выделения кода, с выхода которого считанные коды, соответствующие различным информационным дорожка.м, поаются через коммутатор 20 в блок 18 памяти. Выдача навигационных данных из блока 18 памяти в .магистраль обмена вычислителя производится через коммутатор 21. Затем производят автоматизированное измерение и выдачу в .магистраль обмена вычислителя значений координат интересующих точек аэроснимка. Для этого прибор
переводят в режим считывания координат
12 с входом ВКУ 16, коммутатор 21 обеспечивает подключение выхода регистра 7 координат к магистрали выдачи информации в вычислитель. Измерение выполняют путем наведения ТОГ 2 на точку аэроснимка, при этом видеосигнал с ТОГ 2 через видеоусилитель 12 и коммутатор 19 поступает па вход ВКУ 16, на экране которого воспроизводится изображение измеряемой точки. Благодаря сформирвапной в ТОГ 2 визирной марки производят точное наведение па измеряемую точку, при этом перемещение подвижных кареток вдоль направляющих X и У просмотрового стола 1 преобразуется датчиками 5 и 6 в двоичный код, пропроциональный перемещению каре- ток, выходные сигналы с датчиков 5 и 6 поступают па регистр 7 координат. Выдача значений координат из регистра осуществляется через коммутатор 21 в магистраль выдачи информации в вычислитель. После выполнения считывания матрицы, измере- ния и ввода в вычислитель координат точек блок 22 переключения режимов автоматически переключает устройство в режим приема информации от вычислителя и отображения ее на ВКУ 16. В этом режиме коммутатор 19 обеспечивает подключение входа ВКУ 16 к выходу знакогенератора 17, коммутатор 20 обеспечивает подключение вычислителя с входом блока 18 памяти.
Информацция для отображения поступи ет из блока 18 памяти. После преобр;:- зования в блоке 17 соответствующего видеосигнала информация поступает на вхо.ч ВКУ 16. Ввиду этого информация на экране ВКУ 16 отображается в ци(|)ровой форме.
Формула изобретения
Устройство для определения оординат точек по аэроснимкам, содержащее HJJOCMOT- ровый стол с подсвето.м, измерипми плоских координат точек на аэроснимках, вы- полненные в виде двух подвижных кареток, кинематически соединен1П 1х с датчиками продольного и поперечного перемещепий, выходы которых соединены с первым и вторым входами регистратора текущих координат, вычислитель, телевизионную оптическую головку с визиром, закрепленную на второй подвижной каретке, синхрогенератор, первый
О , 0
5
5
выход которого соединен с первым входом видеоконтрольного устройства и входом генератора строчной частоты, выход которого соединен с первым входом усилителя разверток, выход которого соединен с входом телевизионной оптической головки, второй выход синхрогенератора соединен с вторым входом видеоконтрольного устройства и входом генератора кадровой частоты, выход которого соединен с вторым входом усилителя разверток, третий выход синхрогенератора соединен с первым входом знакогенератора и первым входом блока памяти, первый выход которого соединен с вторым входом знакогенератора, выход телевизионной оптической головки соединен с выходом видеоусилителя, первый выход которого соединен с первым входом первого коммутатора, выход которого соединен с третьим входом видеоконтрольного устройства, а выход знакогенератора еоединен с вторым входом первого коммутатора, отличающееся тем, что. с целью повышения производительности труда за счет сокращения времени определения координат точек, оно снабжено вторым и третьим коммутаторами, переключателем режимов работ, формирователем видеосигнала, блоком выделения кода, а также блоком привязки к синхродорожке матрицы навигационных данных, первый вход которого соединен с выходом генератора кадровой частоты, второй вход соединен с первым выходом формирователя видеосигнала, ; выхо.; соединен с первым входом блока иы;име1П1Я кода, вход формирователя видеосигнала соединен с вторым выходом видео- ч си. штеля. а второй выход еоединен с вторым входо.м блока выделения кода, выход которого соединен е первым входом второ- 0 коммутатора, выход вычислителя соединен с вторым входом второго коммутато- p. i, выход которого соединен с вторым входом блока памяти, первый выход переключателя режимов работ соединен с третьим входом первого коммутатора, второй соединен с третьим входом второго коммутатора, а третий выход соединен с вторым входом третьего коммутатора, выход которого соединен с вычислителем, при этом второй выход блока памяти соединен с третьим входом третьего коммутатора, первый вход которого соединен с выходом регистратора текущих координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для трансформирования снимков | 1979 |
|
SU859814A1 |
| Устройство для считывания изображения со снимков | 1982 |
|
SU1081416A1 |
| Устройство для считывания кодограмм | 1977 |
|
SU736136A1 |
| Устройство для дешифрирования аэроизображений с определением координат объектов | 1974 |
|
SU505879A1 |
| Устройство для контроля видеосигнала | 1982 |
|
SU1069190A1 |
| Телевизионное устройство для контроля движения транспортных средств | 1983 |
|
SU1235002A1 |
| Устройство для отображения алфавитно-цифровой информации на экране телевизионного индикатора | 1986 |
|
SU1410093A1 |
| Устройство для отображения информации | 1982 |
|
SU1084862A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1980 |
|
SU888183A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
Изобретение относится к фотогра.ммет- ри и позволяет повысить производительность труда путем сокращения времени определения координат точек. Для выделения кода из видеосигнала используется блок 15 привязки к синхродорожке матрицы, вырабатывающий стробирующие импульсы в момент времени, соответствующий середине импульсов. С выхода блока 14 выделения кода считанные коды, соответствующие различным информационным дорожкам, подаются через коммутатор 20 в память 18. Выдача навигационных данных из памяти 18 в магистраль обмена вычислителя производится через коммутатор 19. Затем производят автоматизированное из.мерение и выдачу в .магистраль обмена вычислителя значений координат интересующих точек аэроснимка. 1 ил. е MazucTpaf b of мена с ЭВМ (Л Ю оо ел со
| УСТРОЙСТВО ДЛЯ СЛИЧЕНИЯ КАРТОГРАФИЧЕСКИХ | 0 |
|
SU380950A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект фирмы «Матра | |||
| Франция, MATRA OPTIQUE/TRASTER, выставка в Москве, 1980. | |||
