Предлагаемое изобретение касается аппарата для темпирования артиллерийских снарядов, снабженных дистанционными трубками с часовым механизмом такого типа, в котором завод двигательной пружины часового механизма и регулировка времени разрыва снаряда производится одновременно посредством поворачивания, расположенного по оси снаряда в головной его части ключа на определенный угол с точностью до некоторых долей градуса. Аппарат для поворота ключа снаряда представляет собою поворотное приспособление, в котором отдельные части механизма вращаются одновременно с ключом (ключами) одного или нескольких снарядов, сцепленных с передаточным ободом, угловое перемещение которого ограничивается, с одной стороны, упором, неподвижно установленным на корпусе аппарата, а с другой стороны - подвижным стопором, помещенным на поворотном цыферблате с нанесенной по окружности последнего градуировкой, при чем этот стопор может быть установлен на цыферблате под любым углом с точностью до долей градуса вручную, и установка его производится независимо от передаточного зубчатого обода.
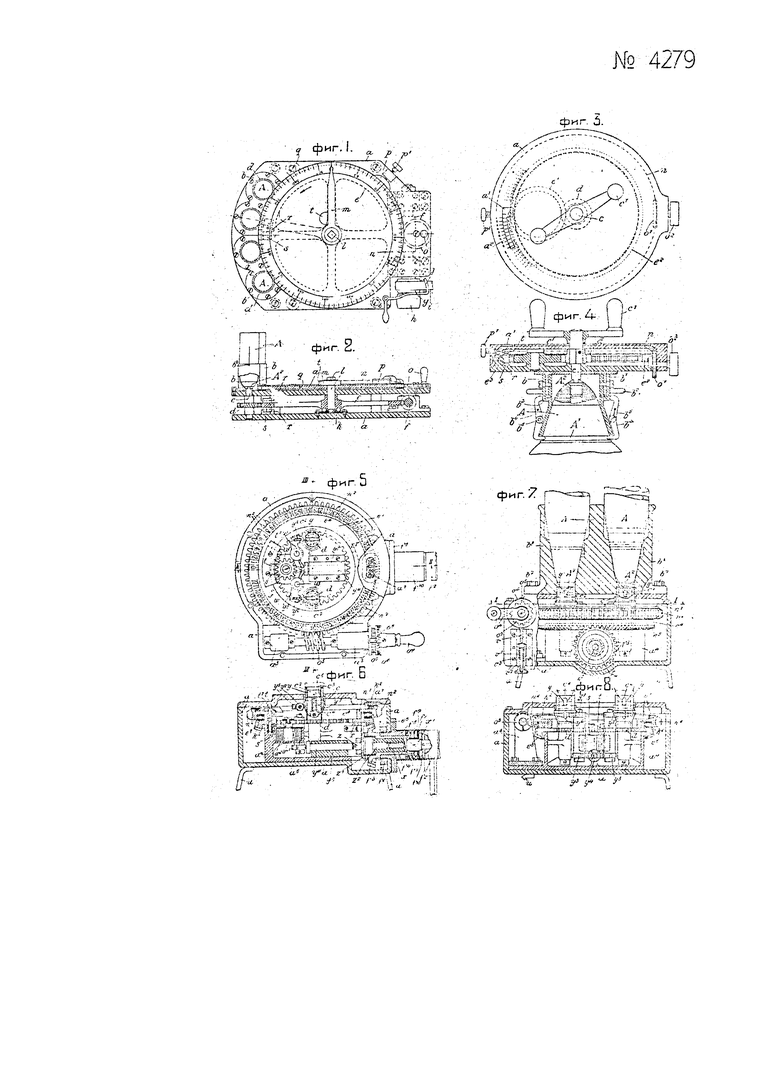
На фиг. 1-8 изображены три различных рода выполнения предлагаемого изобретения: фиг. 1 и фиг. 2 представляют собою вид первого типа аппаратов для темпирования артиллерийских снарядов, изображенного в плане и в поперечном разрезе и предназначенного для одновременного темпирования четырех снарядов сразу; фиг. 3 и фиг. 4 изображают собою также в плане и в поперечном разрезе другой тип аппарата, предназначенного для темпирования всего лишь одного артиллерийского снаряда, при чем темпирование в этом случае производится вручную; фиг. 5 представляет собою горизонтальный разрез третьей формы выполнения, при чем этот разрез сделан по линии I-I фиг. 7; фиг. 6 изображает поперечный разрез по линии II-II фиг. 5; фиг. 7 и 8 изображают также поперечные разрезы, взятые под прямым углом по отношению к фигуре 6, а именно, по линии III-III фиг. 5, и показывают каждая в отдельности различные части аппарата.
В первом типе (фиг. 1 и 2) корпус a аппарата состоит из двух площадок, соединенных четырьмя болтами и поддерживаемых четырьмя, обхватывающими эти болты, втулками. К верхней площадке прикреплены две пары гнезд b. Каждое из этих гнезд служит для помещения одного снаряда А, при чем для облегчения правильной установки снаряда в гнезде, последнее имеет на внешней стороне зарубку ba (фиг. 2), соответствующую марке, нанесенной на снаряде А. Дно каждого гнезда просверлено в центральной части в соответствии с отверстием, имеющимся в верхней площадке a, для прохода вертикального стержня c, оканчивающегося внутри вышеупомянутого гнезда шипом, сцепляющимся с ключом А2 для завода и регулировки снаряда. Означенные четыре стержня c вращаются между площадками a вместе с насаженными на них геликоидальными шестеренками d, находящимися в сцеплении с центральным геликоидальным зубчатым колесом e. Это последнее приводится в действие мотором (не показанным, на чертеже), при посредстве бесконечного червячка f, получающего вращение от шкива g и трансмиссионных ремней i; буквами h и j соответственно обозначены холостой шкив и переключательная вилка. Центральное колесо e установлено на шариковом подшипнике k, прикрепленном в центре нижней площадки a. Это колесо насажено на вертикальный шпиндель  , который вращается в центральном отверстии верхней площадки a и выходит наружу в виде квадратной головки, на которой заклинена стрелка m, перемещающаяся поверх градуированного зубчатого диска n. Последний свободно насажен поверх верхней площадки а на цилиндрическую часть шпинделя
и может поворачиваться вручную при помощи небольшого зубчатого колеса, соединенного с рукояткою o. Арретир p позволяет при помощи винта p′ застопорить диск под любым углом. В качестве направляющей для диска n служат зубчатые ролики q. Когда центральное колесо e находится в состоянии покоя (т.-е. в положении, показанном на чертеже), то его вращению в направлении движения часовой стрелки препятствует неподвижный упор r, на который в этом положении опирается лодыжка или заплечик s, прикрепленный к ободу колеса e. Вышеозначенный упор r служит равным образом для ограничения максимального углового перемещения колеса e, при чем тогда лодыжка упрется в него с противоположной стороны, описав в направлении обратном движению часовой стрелки дугу, приблизительно, в 356 градусов. Промежуточные угловые перемещения колеса e ограничиваются посредстом подвижного стопора t, в который будет тогда упираться тело стрелки m. Упомянутый стопор находится во взаимном сцеплении с диском n и, в случае надобности, может быть вместе с ним установлен неподвижно в любом угловом положении при помощи арретира p. Угловое положение стопора t на диске n в отношении градуировки упомянутого диска рассчитано так, чтобы деление 0 градуировки совпадало с острием стрелки m тогда, когда колесо e будет стопориться с одной стороны неподвижным упором r, а с другой - стопором t, упирающимся в тело стрелки m (положение это изображено на чертеже). Действие аппарата этого типа состоит в следующем: четыре снаряда А устанавливаются неподвижно в четырех гнездах b при помощи имеющихся приспособлений (не показанных на чертеже) так, чтобы их ключ А2 находился в сцеплении со стержнями c и чтобы все подвижные части аппарата находились в изображенном положении, каковое является положением покоя. Затем поворачивают подвижной стопор t на желаемый угол, вращая маленькую рукоятку o по движению часовой стрелки (а следовательно, диск n - против часовой стрелки) до тех пор, пока желаемое деление цыферблата не поместится против конца стрелки. Деление цыферблата дают непосредственно в шестидесятых долях секунды продолжительностью 900 различных моментов взрыва между 0 и 15 секундами, которые могут быть достигнуты при помощи аппарата (на чертеже, для большей ясности, изображены только деления, соответствующие каждой
, который вращается в центральном отверстии верхней площадки a и выходит наружу в виде квадратной головки, на которой заклинена стрелка m, перемещающаяся поверх градуированного зубчатого диска n. Последний свободно насажен поверх верхней площадки а на цилиндрическую часть шпинделя
и может поворачиваться вручную при помощи небольшого зубчатого колеса, соединенного с рукояткою o. Арретир p позволяет при помощи винта p′ застопорить диск под любым углом. В качестве направляющей для диска n служат зубчатые ролики q. Когда центральное колесо e находится в состоянии покоя (т.-е. в положении, показанном на чертеже), то его вращению в направлении движения часовой стрелки препятствует неподвижный упор r, на который в этом положении опирается лодыжка или заплечик s, прикрепленный к ободу колеса e. Вышеозначенный упор r служит равным образом для ограничения максимального углового перемещения колеса e, при чем тогда лодыжка упрется в него с противоположной стороны, описав в направлении обратном движению часовой стрелки дугу, приблизительно, в 356 градусов. Промежуточные угловые перемещения колеса e ограничиваются посредстом подвижного стопора t, в который будет тогда упираться тело стрелки m. Упомянутый стопор находится во взаимном сцеплении с диском n и, в случае надобности, может быть вместе с ним установлен неподвижно в любом угловом положении при помощи арретира p. Угловое положение стопора t на диске n в отношении градуировки упомянутого диска рассчитано так, чтобы деление 0 градуировки совпадало с острием стрелки m тогда, когда колесо e будет стопориться с одной стороны неподвижным упором r, а с другой - стопором t, упирающимся в тело стрелки m (положение это изображено на чертеже). Действие аппарата этого типа состоит в следующем: четыре снаряда А устанавливаются неподвижно в четырех гнездах b при помощи имеющихся приспособлений (не показанных на чертеже) так, чтобы их ключ А2 находился в сцеплении со стержнями c и чтобы все подвижные части аппарата находились в изображенном положении, каковое является положением покоя. Затем поворачивают подвижной стопор t на желаемый угол, вращая маленькую рукоятку o по движению часовой стрелки (а следовательно, диск n - против часовой стрелки) до тех пор, пока желаемое деление цыферблата не поместится против конца стрелки. Деление цыферблата дают непосредственно в шестидесятых долях секунды продолжительностью 900 различных моментов взрыва между 0 и 15 секундами, которые могут быть достигнуты при помощи аппарата (на чертеже, для большей ясности, изображены только деления, соответствующие каждой  секунды, а также деления, соответствующие каждой секунде). Так, например, для получения разрыва снаряда через 7 и
секунды, а также деления, соответствующие каждой секунде). Так, например, для получения разрыва снаряда через 7 и  секунды (т.-е. через
секунды (т.-е. через  сек.) нужно, чтобы диск n описал полукруг около своей оси по направлению стрелки (фиг. 1), т.-е. чтобы деление 465 (не указанное на чертеже) подошло под острие стрелки m. Затем диск n надлежит застопорить при помощи арретира p. Установленный таким образом аппарат готов к производству одного или нескольких последовательных операций темпирования снарядов на разрыв точно в определенный момент, а именно через
сек.) нужно, чтобы диск n описал полукруг около своей оси по направлению стрелки (фиг. 1), т.-е. чтобы деление 465 (не указанное на чертеже) подошло под острие стрелки m. Затем диск n надлежит застопорить при помощи арретира p. Установленный таким образом аппарат готов к производству одного или нескольких последовательных операций темпирования снарядов на разрыв точно в определенный момент, а именно через  секунды. Каждая из упомянутых операций состоит в следующем: 1) пуск в ход мотора для поворота четырех ключей А2 в направлении обратном движению часовой стрелки до тех пор, пока тело стрелки m не упрется в стопор t; 2) установка мотора на время, потребное для того, чтобы вынуть четыре уже темпированных снаряда; 3) пуск мотора на обратный ход для возвращения темпирующего механизма в исходное положение, т.-е. к нулевому делению градуированного диска и 4) установка на место четырех новых снарядов. Возвращение темпирующего механизма к нулевому делению диска могло бы быть также достигнуто независимо от мотора, при помощи пружины, стремящейся постоянно повернуть центральное колесо e по направлению движения часовой стрелки. В последнем случае можно было бы снабдить аппарат защелкивающим механизмом, во избежание преждевременного действия обратной пружины, т.-е. прежде, чем все четыре снаряда не будут вынуты из аппарата. При этом храповик означенного механизма лучше всего присоединить к стержню бесконечного червяка f, а зещелку поместить на одном из неподвижных устоев означенного червяка таким образом, чтобы ее можно было разобщить с зубцами храповика в тот момент, когда пожелают, чтобы механизм для темпирования был приведен в исходное положение под действием обратной пружины. Расчет зубцов храповика должен быть произведен так, чтобы каждое положение его защелкивания соответствовало положению регулировки аппарата.
секунды. Каждая из упомянутых операций состоит в следующем: 1) пуск в ход мотора для поворота четырех ключей А2 в направлении обратном движению часовой стрелки до тех пор, пока тело стрелки m не упрется в стопор t; 2) установка мотора на время, потребное для того, чтобы вынуть четыре уже темпированных снаряда; 3) пуск мотора на обратный ход для возвращения темпирующего механизма в исходное положение, т.-е. к нулевому делению градуированного диска и 4) установка на место четырех новых снарядов. Возвращение темпирующего механизма к нулевому делению диска могло бы быть также достигнуто независимо от мотора, при помощи пружины, стремящейся постоянно повернуть центральное колесо e по направлению движения часовой стрелки. В последнем случае можно было бы снабдить аппарат защелкивающим механизмом, во избежание преждевременного действия обратной пружины, т.-е. прежде, чем все четыре снаряда не будут вынуты из аппарата. При этом храповик означенного механизма лучше всего присоединить к стержню бесконечного червяка f, а зещелку поместить на одном из неподвижных устоев означенного червяка таким образом, чтобы ее можно было разобщить с зубцами храповика в тот момент, когда пожелают, чтобы механизм для темпирования был приведен в исходное положение под действием обратной пружины. Расчет зубцов храповика должен быть произведен так, чтобы каждое положение его защелкивания соответствовало положению регулировки аппарата.
Центральное колесо e, вместо бесконечного червяка, может получать движение и каким-либо иным способом, например, посредством конической зубчатой передачи.
Во втором типе выполнения изобретения, - для темпирования за один прием только одного снаряда (фиг. 3 и фиг. 4) корпус аппарата имеет вид плоской цилиндрической коробки a, в крышке которой сделано отверстие a′ для наблюдений, в котором последовательно появляются деления градуированного цыферблата n, когда последний приводится во вращательное движение, посредством маховичка o2, соединенного с зубчатым колесиком o1, который, в свою очередь, находится в сцеплении с нижней зубчатой поверхностью градуированного диска n. Упомянутое выше отверстие представляет собою продольный дуговой вырез a2, по внешнему краю которого нанесены деления кругового верньера. В описываемом случае снаряды не вставляются в аппарат вниз головою, как это было указано для предыдущего типа, а, наоборот, сам аппарат накладывается на голову снаряда, стоящего в нормальном своем положении, т.-е. головой вверх, и закрепляется на нем. Означенное закрепление производится следующим образом: гнездо b, имеющее форму цилиндра, соединенного с усеченным конусом, неподвижно присоединено к нижней части коробки, в ее центральной части. На это гнездо, с некоторым угловым зазором, насажено кольцо b1, которое может быть поворачиваемо посредством двух, радикально расположенных ручек b2, и которое имеет по своей периферии четыре скошенных выемки или четыре уступа b3, которые при поворачивании означенного кольца действуют подобно клиньям на четыре рычажных крюка b4. Каждый из этих рычагов - крюков находится под действием обратной пружины b5, стремящейся повернуть рычаг около его оси b6 и тем самым вывести его крючкообразный конец из кольцевого желобка А1 снаряда А, что, однако, может иметь место лишь в том случае, если наименее выдающаяся часть скошенного уступа будет поставлена против упомянутого рычажного крюка. Для воспрепятствования угловому перемещению аппарата относительно снаряда А может быть использовано любое приспособление, хотя бы вроде заостренного винта (на чертеже не указанного). Стержень c, снабженный шипом для сцепления с ключом А2 снаряда, проходит сквозь коробку a, при чем на его внешнем, выступающем над крышкой коробки, конце насажена рукоятка c1, при помощи которой означенный стержень можно вращать непосредственно вручную. Шестеренка d, насаженная на стержень c внутри коробки, сцепляется с промежуточным зубчатым колесом e1, которое находится, в свою очередь, в сцеплении с внутренней зубчатой поверхностью e2 обода. На последнем имеется ограничитель s, действующий совместно с неподвижным упором r, с одной стороны, а с другой - с подвижным стопором t, помещенным под градуированным диском n. Обод e2 вращается вокруг своей оси на шариковом подшипнике e3. Стопорный винт p1 служит для удержания цыферблатного диска в его регулировочном положении. Действие аппарата этого типа отличается от предыдущего только тем, что здесь темпирование производится лишь для одного снаряда за один прием, при чем ключ A2 снаряда поворачивается просто рукою. Пользуясь верньером a2, можно производить измерения при установке диска с точностью до  его делений. В аппарате этого типа также может быть установлена пружина, для автоматического приведения всех движущихся частей темпировочного механизма, после каждого темпирования, в первоначальное положение. Рукоятка c1 может быть сделана фрикционной, т.-е. удерживаться на стержне при помощи трения, или же она может быть навинчена на стержень c, но тогда, во избежание порчи аппарата, она должна быть снабжена устройством для получения свободного хода, или, иначе говоря, вращения вхолостую, после того как ограничитель s придет в соприкосновение со стопором t.
его делений. В аппарате этого типа также может быть установлена пружина, для автоматического приведения всех движущихся частей темпировочного механизма, после каждого темпирования, в первоначальное положение. Рукоятка c1 может быть сделана фрикционной, т.-е. удерживаться на стержне при помощи трения, или же она может быть навинчена на стержень c, но тогда, во избежание порчи аппарата, она должна быть снабжена устройством для получения свободного хода, или, иначе говоря, вращения вхолостую, после того как ограничитель s придет в соприкосновение со стопором t.
В третьей форме выполнения (фиг. 5-8) корпус аппарата покоится на ножках u и имеет вид коробки a, к которой при помощи винтов b7 присоединен анкер b8, служащий в качестве подставки для помещения снарядов (фиг .7). В этой подставке сделаны два суживающиеся книзу ложа, в каждое из которых помещается по снаряду A, направленных головной частью вниз, при чем в угловом отношении они закрепляются любым имеющимся в распоряжении способом. Ключ для одновременного завода и регулировки каждого из этих снарядов приводится во вращательное движение при помощи шипа c2, установленного с некоторым зазором, в вертикальном направлении, в поперечной прорези c3, имеющейся на верхнем конце вертикального стержня c. Этот последний прикреплен при помощи чеки c4 к ступице шестеренки d, связанной с внутренней зубчатой поверхностью обода передаточного механизма e4. На этом ободе имеется ограничитель s, предназначенный для ограничения движения обода и действующий совместно с неподвижным упором r (фиг. 6), - с одной стороны, а с другой - с подвижным стопором t, прикрепленным винтом tl под градуированным ободом n1, имеющим геликоидальную зубчатую поверхность n2, связанную с бесконечным винтом o3. Означенный винт помещен в подшипнике a3, установленном внутри корпуса a аппарата и приводится во вращательное движение от руки при помощи маленькой ручки o4. На стержне этой рукоятки неподвижно насажен градуированный барабан o6, который действует совместно с укрепленным индексом o5. На этом же стержне насажен также зубчатый диск o7, присоединенный к задней части барабана o6 и действующий совместно с защелкой  v, находящейся под давлением пружины v1, которая постоянно стремится удержать ее между зубцами диска o7. На диске o7 имеется столько же зубцов, сколько делений на барабане o6, чтобы можно было сразу же определить угловое положение рукоятки o4, которое соответствует регулировочному положению градуированного барабана o6. Защелка v работает в вертикальном направлении в кулисе v2 прикрепленной винтами v3 (фиг. 7) к передней стенке корпуса аппарата. Шаг бесконечною винта o3 рассчитан в соответствии с градуировкой обода n1 таким образом, чтобы этот последний, при каждом обороте бесконечного винта, описывал дугу соответствующую одному делению. Каждое деление обода n1 может быть подразделено на столько частей, сколько имеется делений на барабане o6.
v, находящейся под давлением пружины v1, которая постоянно стремится удержать ее между зубцами диска o7. На диске o7 имеется столько же зубцов, сколько делений на барабане o6, чтобы можно было сразу же определить угловое положение рукоятки o4, которое соответствует регулировочному положению градуированного барабана o6. Защелка v работает в вертикальном направлении в кулисе v2 прикрепленной винтами v3 (фиг. 7) к передней стенке корпуса аппарата. Шаг бесконечною винта o3 рассчитан в соответствии с градуировкой обода n1 таким образом, чтобы этот последний, при каждом обороте бесконечного винта, описывал дугу соответствующую одному делению. Каждое деление обода n1 может быть подразделено на столько частей, сколько имеется делений на барабане o6.
Застопоривание обода n1 в желаемом положении регулировки производится посредством бесконечного винта o3, который, в свою очередь, стопорится в означенном регулировочном положении барабаном o6, посредством защелки v. В крышке корпуса а аппарата сделано отверстие для наблюдения a1, в котором последовательно появляются деления обода n1, по мере вращения рукоятки o4. Между ободами e4 и n1 находится шариковый подшипник k2. Обод e4 своими внутренними зубцами сцеплен также с шестеренкой
w, соединенной с воротом w1 обратной пружины w2, которая служит для приведения обода e4 передаточного механизма в первоначальное положение покоя, при котором ограничитель s приходит в соприкосновение с неподвижным упором r. Обод e4 передаточного механизма, кроме внутренней зубчатой поверхности, сцепленной с шестеренками d, имеет еще другую зубчатую поверхность e5 находящуюся в сцеплении с конической шестеренкой f3, отлитой заодно с муфтой f4. Эта муфта свободно вращается в подшипнике f5, закрепленном при помощи гайки f6 в отверстии на передней стенке корпуса a, и снабжена кольцом f7 навинченным на ее свободный нарезной конец. Поворотная рукоятка f2 свободно насажена на цилиндрическую конечность стержня х, который свободно вращается в муфте. Означенная рукоятка сцепляется при своем вращении со стержнем х посредством защелкивающего механизма f8, свободно насаженного на квадратную часть x1 стержня х, и находящегося под давлением пружины f9. Эта пружина опирается на выточку в кольце f7 и стремится удержать во взаимном сцеплении зубчатые поверхности муфты f8 защелкивающего механизма и рукоятки f2. Кожухообразная муфта f3, прикрепленная к подшипнику f5, предохраняет защелкивающий механизм рукоятки от пыли. В этой форме выполнения изобретения имеется возможность разобщать рукоятку f2, после каждой операции темпирования, при вынимании обоих темпированных снарядов из аппарата, следующим образом: на каждый стержень c свободно насажена втулка y, имеющая обточенную на конус часть y1, играющую роль клина при перемещении втулки y в осевом направлении из положения, изображенного пунктиром, в положение, изображенное сплошными линиями (фиг. 6-8), во время вкладывания двух снарядов А, подлежащих темпированию. Роль клина заключается в следующем: обе втулки y, опускаясь под давлением веса двух снарядов А, толкают своей конической частью y1 два направляющих ролика y2, каждый из которых помещен на один из концов рычагов y3, другие концы которых давят на кулису y4, приводя тем самым в действие нажимной выключатель z сцепной пластинки zl.
Сцепная пластинка z1 удерживается обыкновенно в положении бездействия посредством нажимного пружинного выключателя z2, работающего в полой оси стержня х. Как только оба, подлежащие темпированию, снаряда А будут вставлены на место, упомянутая пластинка займет активное положение, при котором она механически соединяет стержень x с шестеренкой f3, посредством которой обод e4 передаточного механизма получает вращательное движение при помощи рукоятки f2. Если же оба темпированных снаряда А будут вынуты, то обе втулки y возвратятся в свое первоначальное положение, и сцепная пластинка займет положение покоя под давлением пружинного выключателя z2, раз′единяя, таким образом, рукоятку f2 с шестеренкой f3. Внутри корпуса a установлена рама a4, служащая опорой для двух ободов e4 и n1, двух шестеренок d и одной направляющей y5, в которой работает кулиса y4. Эта рама имеет с внутренней стороны прилив a5, образующий собою коробку для обратной пружины w2. К paме a4 присоединен также неподвижный упор r. Во избежание повреждений шипов c2, сцепляющихся во время вкладывания на место снарядов А с ключами А2, применена амортизационная пружина c5. Действие этой формы выполнения следующее: при помощи рукоятки o4 начинают регулировать аппарат на желаемое темпирование, вращая упомянутую рукоятку до тех пор, пока можно будет прочесть желаемое деление под обоими индексами в отверстии f1 и на градуированном барабане o6. Стержень бесконечного винта o3 будет тогда удерживаться в означенном положении неподвижно защелкой v, в то время, как градуированный обод n1 будет застопорен в своем угловом регулировочном положении винтом o3. Теперь аппарат готов к производству одного или нескольких последовательных операций темпирования двух снарядов на разрыв в желаемый момент, при чем каждая из этих операций подразделяется следующим образом: 1. Вкладывание на место двух снарядов А, производящее сцепление стержня x с шестеренкой f3. 2. Приведение в действие обода e4 передаточного механизма при посредстве рукоятки f2, продолжающееся до момента соприкосновения ограничителя s со стопором t, установленным на градуированном ободе n1, при котором приводятся в действие стержни c для производства желаемой установки снарядов и завода обратной пружины w2. 3. Вынимание обоих темпированных снарядов, следствием чего получается автоматическое расцепление стержня рукоятки x. 4. Автоматическое возвращение обода e4 передаточного механизма под действием пружины w2, происходящее с момента прекращения действия рукоятки на означенную пружину.
Можно было бы предложить еще несколько вариантов: так, например, можно было бы взаимно действующие шестеренку f3 и рукоятку f2 насадить на цилиндрическую ось таким образом, чтобы они могли перемещаться в осевом направлении. В этом случае раз′единение рукоятки f2 и совместно действующей в ней шестеренки f3 с передаточным ободом e4 производилось бы от руки, посредством оттягивания в осевом направлении рукоятки после совершенного удаления уже темпированного снаряда или снарядов. Шестеренка f3 могла бы быть также насажена подвижно в осевом направлении на квадратную часть стержня рукоятки f2 и иметь выточку, в которой ходила бы вилка разобщительного рычага, приводимого в действие вкладыванием или выниманием снаряда или снарядов. Наконец, обод e4 передаточного механизма мог бы состоять из двух концентрических частей, одна из коих имела бы внутреннюю зубчатую поверхность, сцепленную с шестеренками d и колесом w, а другая часть имела бы зубчатую поверхность e5. В этом случае шестеренка f3 находилась бы в постоянном сцеплении с зубчатой поверхностью e5, а внешняя часть обода e4 раз′единялась бы в конце каждой операции темпирования. Это раз′единение могло бы происходить, как и в предыдущих случаях, вследствие вынимания темпированного снаряда или снарядов, или же при помощи рукоятки, приспособленной соответствующим образом. В некоторых случаях, во избежание преждевременного обратного действия пружины w2, т.-е. прежде, чем ключи А2 совершенно раз′единятся с шипами c2, можно использовать, вместо инерции рукоятки, защелкивающий механизм, собачка которого для освобождения в желаемый момент обода e4 (для действия пружины) может расцепляться либо автоматически, либо вручную, в зависимости от имеющихся в распоряжении приспособлений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКАЯ ДИСТАНЦИОННАЯ ТРУБКА ДЛЯ АРТИЛЛЕРИЙСКИХ СНАРЯДОВ | 1925 |
|
SU4278A1 |
| ПРИБОР ДЛЯ ПОЛУЧЕНИЯ ИСХОДНЫХ ДАННЫХ ПРИ ЗЕНИТНОЙ СТРЕЛЬБЕ | 1925 |
|
SU4656A1 |
| МЕРИЛЬНО-НАКАТНАЯ МАШИНА ДЛЯ ТКАНЕЙ | 1928 |
|
SU38614A1 |
| Логарифмический счетный прибор | 1931 |
|
SU37906A1 |
| Счетный логарифмический диск | 1923 |
|
SU3354A1 |
| Устройство для определения глубины воды под килем движущегося судна | 1926 |
|
SU5488A1 |
| Прибор для измерения площадей криволинейных фигур (планиметр) | 1925 |
|
SU2561A1 |
| Счетная машина | 1928 |
|
SU13284A1 |
| Логарифмическая счетная машина | 1928 |
|
SU20375A1 |
| ТАХОМЕТР | 1925 |
|
SU2508A1 |
1. Аппарат для темпирования артиллерийских снарядов, снабженных трубками с часовым механизмом такого типа, в котором завод часовой пружины и регулировка времени разрыва снаряда производится одновременно, посредством поворота на определенный угол ключа, помещенного в головной части снаряда, по его оси, характеризующийся применением поворотного приспособления, снабженного насаженным свободно на ось аппарата, градуированным диском n (фиг. 1-4) или n1 (фиг. 5-8) со стопором t и передаточным ободом e (фиг. 1-2), e2 (фиг. 3-4) или e4 (фиг. 5-8), угловое перемещение которого ограничено с одной стороны упорами r (фиг. 1-8), неподвижно присоединенными к корпусу аппарата, и с другой - указанным стопором t (фиг. 1-8), каковое приспособление предназначено, после установки с точностью до некоторых долей градуса указанного диска n или n1 посредством поворота маховика o (фиг. 1-2), o2 (фиг. 3-4) или o4 (фиг. 5-8) и закрепления его стопорным винтом p
(фиг. 1-2) или p1 (фиг. 3-4) или защелкой  (фиг. 7), для передачи вращения привода до упора стрелки m (фиг. 1-2) или ограничителя s (фиг. 3-8) обода о подвижный стопор, ключу одного или ключам нескольких снарядов, с целью установки трубки или трубок на дистанционное действие.
(фиг. 7), для передачи вращения привода до упора стрелки m (фиг. 1-2) или ограничителя s (фиг. 3-8) обода о подвижный стопор, ключу одного или ключам нескольких снарядов, с целью установки трубки или трубок на дистанционное действие.
2. Применение к охарактеризованному в п. 1 аппарату автоматического приводного устройства (фиг. 5-8), состоящего из конической шестерни f3 и, расположенного по ее оси, стержня x, соединенного подвижно с одной стороны рукояткой привода f2, посредством защелкивающей муфты f8 и с другой - со сцепной пластинкой z1, предназначенной, после оседания конических втулок y при вкладывании снарядов и перемещения, механически связанной с ними, кулисы y4 в направлении указанной шестерни, для сцепления рукоятки привода с ободом передаточного механизма и последующего расцепления их под действием пружинного выключателя z2 при удалении темпированных снарядов.
