Предлагаемое изобретение, предназначаемое для получения исходных данных при зенитной стрельбе, относится к типу дальномеров-высотомеров с горизонтальной базой вне прибора, измеряющих углы в плоскости база-цель и строящих по этим углам и углу наклона плоскости база-цель геометрическую схему. В предлагаемом приборе вертикальной проекции батарей на плоскость движения цели соответствует постоянная точка, являющаяся центром вращения линейки на столе, воспроизводящим плоскость движения цели. В приборе предусматривается автоматическое определение упрежденных данных для стрельбы, трансформированных на точку стояния батарей, но с неавтоматической установкой времени упреждения и с прерывом подачи текущих данных во время получения упреждения.
Весь прибор состоит из двух аппаратов, построителя и угломера, взаимно соединенных синхронной электрической передачей.
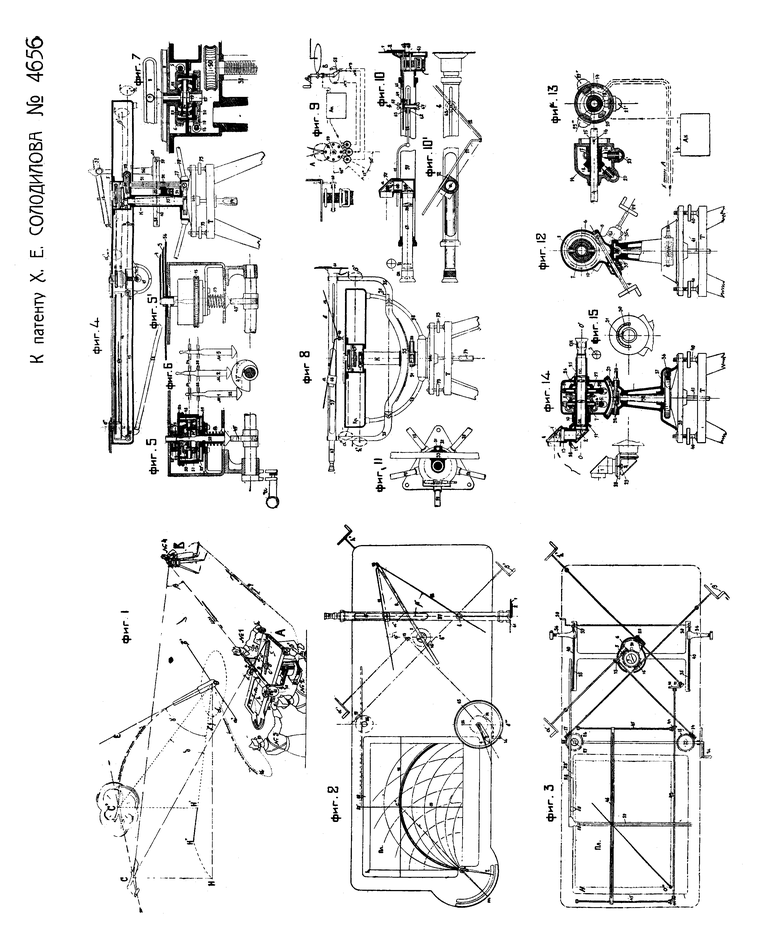
На чертежах фиг. 1 обозначает схему расположения приборов во время пользования ими с перспективным видом как самих приборов, обслуживающего их персонала и неподвижной батареи, так и моментов движущейся цели и изображения траектории полета снаряда, фиг. 2 - вид главной части прибора построителя сверху, фиг. 3 - то же, со снятой верхней доской, фиг. от 4 до 11, включительно, обозначают: построитель в различных разрезах и детали его, фиг. 12, 13, 14 и 15 - устройство угломера и его детали.
Построитель имеет следующие главные части: а) коробку Кр, в которой заключены все передаточные механизмы (фиг. 8), б) планшет Пл (фиг. 2), на котором получаются данные для передачи команды, в) вертикальную колонку К, с помощью которой коробка насаживается на штырь штатива 74 (фиг. 8), г) штатив Ш с тремя установочными винтами, д) треногу Т, е) подвижную раму 33, со зрительной трубой 37 (фиг. 8).
Механизм для передачи азимуальных углов α′′ состоит и следующем: от рукоятки α′ вращение передается червяку 5 (фиг. 3), который приводит в движение червячное колесо 6, намертво соединенное с шайбой 7. Эта шайба имеет диаметральный прорез, в котором движется линейка 8 (фиг. 7), имеющая внутри паз, по одному краю которого расположена зубчатая рейка, сцепленная с зубчатой шестерней. На конце линейки 8 имеется столбик 10, с которым шарнирно соединены концы штанг 11 и 12 (фиг. 4).
С другой стороны от той же рукоятки α′ через конические шестеренки 13 приводится во вращение червяк 14 на упредительном механизме азимутальных углов, в котором этот червяк приводит в движение червячное колесо 15; размеры сцеплений 5 и 6, 14 и 15 одинаковы и потому угол поворота линейки 8 равен углу стрелки 3, неподвижно скрепленной с червячным колесом 15 (фиг. 2). Для передачи углов β, даваемых прибором В, служит рукоятка β′, вращение которой передается червякам 16 и 17 (фиг. 3). Червяк 16 приводит в движение червячное колесо 18 (фиг. 7), на котором намертво закреплена коническая зубчатая шестерня 19. От этой шестерни, через систему двух дифференциалов, вращение передается зубчатой цилиндрической шестерне 9. Первый дифференциал состоит из конической шестерни 19, соединенной с червячным колесом 18, конической шестерни 24, насаженной на оси, составляющей одно целое с центральной осью, вокруг которой расположены дифференциалы, и конической шестеренки 22, соединенной с цилиндрической зубчатой шестерней 9.
Второй дифференциал состоит: из конической шестерни 20, неподвижно соединенной с корпусом прибора, из шестерни 23, сидящей на той же оси, что и шестерня 24, и конической шестерни 21, соединенной с шайбой 7, в которой движется линейка 8.
При помощи дифференциала, азимутальный угол и величина выдвижения линейки из паза делаются совершенно независимыми друг от друга. При одновременном движении, рукоятки α′ и β′, т.-е., когда угловые скорости а и b не равны нулю, угловая скорость цилиндрической шестерни 9 будет:
y=b-a.
Одновременно с червячным колесом 18 от рукоятки β′ через червяк 17 приводится во вращение червячные колеса 26 упредительного механизма горизонтальной дальности цели. Так как размеры деталей 16 и 18 и 17 и 26 одинаковы, то угловые скорости червячных колес 18 и 26 одинаковы, а следовательно, и угловые скорости цилиндрической шестерни 9 и зубчатой цилиндрической шестерни 27, соединенной неподвижно с червячным колесом 26, в свою очередь, одинаковы, но диаметры шестеренок 9 и 27 (фиг. 5) относятся как 1:2 и потому линейные перемещения сцепленных с этими шестеренками реек 8 и 28 также будут относиться как 1 к 2, т.-е., если для линейки 8 взять масштаб 20 мм = 1 км, то для линейки-рейки 28 этот масштаб будет 40 мм = 1 км. Сделано это для того, чтобы перенесенные на планшет размеры были крупные и тем облегчали бы как чтение планшетных данных, так и увеличивали бы точность передаваемой команды. Для передачи высоты полета воздушной цели над горизонтом батарей служит механизм, связанный с рукояткой h′, вращение которой передается червяку 29 (фиг. 3), приводящему в движение червячное колесо 30 и соединенный с этим колесом винт 31, по которому движется гайка 32 (фиг. 4), соединенная с ползуном, в котором проходит дуга 33. Эта дуга, в свою очередь, может продвигаться в ползуне по кругу с помощью червяка 34 и червячного сектора, прикрепленного снизу к дуге 33 (фиг. 14). По концам дуги 33 имеются салазки 35 (фиг. 4), по которым передвигаются одновременно стойки 36, для поддержки визирной трубы прибора 37. Продвижение этих стоек совершается с помощью рукоятки валика 38, конических шестеренок 39 и винтов 40.
Таким образом вращением рукоятки h′ через упомянутые передаточные механизмы поднимается или опускается зрительная труба 37 над столом прибора, на высоту, соответствующую высоте полета цели, при чем предварительная установка этой зрительной трубы по направлению базы АВ по отношению к точке О′ стола, соответствующей местоположению батареи, производится вращением червяка 34 и вращением рукоятки 38 (фиг. 2).
От рукоятки h′ приводится в движение также передаточный механизм для построения на планшете Пл прибора соответствующих высот полета цели. Для этого служат конические шестеренки 41 и 42, валик 43, конические зубчатые шестеренки 44, 44, винты 45, 45 и перекладина 46, концы которой передвигаются по винтам 45 (фиг. 3).
Размеры деталей для передачи установки высоты цели от рукоятки h′ рассчитаны так, что масштаб под′ема зрительной трубы над столом прибора h′′ (20 мм = 1 км) в два раза меньше, чем масштаб перемещения перекладины на планшете прибора, а именно, величина Н при 40 мм = 1 км.
Для упреждения горизонтальной дальности рукояткой β′ с помощью червяка 17 приводится во вращательное движение червячное колесо 26, насаженное на корпус механизма упреждения 47, который намертво укреплен на корпусе прибора. С колесом 26 составляет одно целое: цилиндрическая зубчатая шестеренка 27 и кольцо 48 (фиг. 5), с внутренней стороны которого укреплены на неподвижных осях конические шестеренки 49, 49. Вместе с шестеренками 50 и 51 они составляют дифференциал, позволяющий при неподвижной шестерне 51 и при угловой скорости =0, вращать шестеренку 50 с угловой скоростью = 2а. С шестеренкой 50 скреплена цилиндрическая зубчатка 27′, сцепленная с рейкой 28′, движущейся в направляющей коробке, по одному пути с рейкой 28. В центральной части механизма движется фигурный шпиндель 52 (фиг. 5, 6), нижний конец которого пружиною 53 постоянно прижат к кулаку 47′. С двух противоположных сторон, по направлению радиусов, на шпиндель 52 давят цилиндрические столбики 54, 54 (фиг. 6), которые прижимаются к шпинделю помощью пружин 54′ и 55′. С другой стороны эти пружины 44′, 55′ с помощью столбиков 54 и 55 могут быть прижаты к соответствующим плоскостям кольца, составляющего одно целое с шестеренкой 51 (пружиной 54′) и к плоскости неподвижного корпуса механизма 47 (пружины 55′). Это нажатие производится соответствующим передвижением шпинделя 52 в тот момент, когда между столбиками 54 и 55 становятся более толстые части шпинделя 52. При положении шпинделя М1 (фиг. 6) обе пары пружин отжаты и все внутренние детали механизма освобождены; при этом положении упругость пружины 56 заставляет шестеренки 27 и 27′ и рейки 28 и 28′ занять в отношении друг к другу вполне определенное положение, которое на планшете прибора должно характеризоваться тем, что индекс 58 нижней рейки 28 совпадает со средней линейкой 59, прикрепленной к концу верхней рейки 28′ (фиг. 5).
При поворачивании кулачка в положение М2 затормаживается шестеренка 51 с неподвижным корпусом 47 механизма, а пружиной 54′ затормаживается шестеренка 51 с кольцом шестеренки 50. Но так как трения для шестеренки 51 будет больше, чем для шестеренки 50, то, при приведении механизма упреждения в действие, останется неподвижной шестеренка 51, а шестеренка 50 забежит вперед на угол 2α, если червячное колесо 26 вместе с дифференциалом повернулось на угол α. Если в таком положении М2 механизм удерживается в течение 10 секунд, то шестеренка 50-27 забегает вперед как-раз на величину, на которую повернется дифференциал по прошествии еще 10 секунд, т.-е. величина этого забегания вперед шестеренки 50-27′ и будет величиной упреждения за 10 секунд. Чтобы полученную таким образом величину упреждения удержать для последующей работы прибора, ставят кулачок 47 в положение М3, при чем шпиндель 52 отпускает торможение шестеренки 51 с корпусом, но оставляет заторможенными шестеренку 51 с шестеренкой 50, т.-е. весь механизм дифференциала как бы становится одним целым с червячным колесом 26. Рейки 28 и 28′, которые при положении М2 переместились в отношении друг друга на величину упреждения = 58-59 при положении М3 начинают двигаться как одна общая рейка, но с постоянной разницей 58-59.
Таким образом, на планшете расстояние от линии О′′′-Н до точки 59 будет упрежденной горизонтальной дальностью цели, а расстояние О′′′ до точки 58 будет горизонтальной дальностью в наблюдательный момент.
Точно такое же внутреннее устройство имеет механизм упреждения азимутальных углов с червячным колесом 15, но только вместо шестеренок 27, 27′ и реек 28, 28′ на ось шестеренки 50 надевается стрелка 4 (фиг. 5′), которая показывает упрежденный азимутальный угол, а с осью червячного колеса 15 скрепляется стрелка 3, показывающая азимутальный угол батареи в данный момент. На диске 56 нанесены в градусах азимутальные углы, считая от линии а′′′ в′′′, параллельной базе АВ. Для переноса угла β на прибор А служит рукоятка βр (фиг. 9), которая на приборе В, приводя в движение призму, определяет угол β одновременным вращением контакта 58 механизма электропередачи. Этот контакт при своем вращении последовательно соприкасается с окончанием трех проводов №1, №2 и №3, которые идут к приемнику на приборе А. Ток в эти провода поступает из аккумулятора Ак через ось рукоятки и вращающийся контакт 58.
На приборе А эти три провода подводятся к соответствующим трем электромагнитам 1, 2, 3, концы якорей которых расположены по окружности барабана 59, который состоит из восьми железных стерженьков, монтированных в эбонитовой оправе, посаженной на оси. Эти стерженьки расположены на таком расстоянии друг от друга, что если один из стержней находится над концом якоря одного из электромагнитов, то два другие стерженька находятся на расстоянии  от концов якорей, где Р есть расстояние между двумя соседними концами якорей.
от концов якорей, где Р есть расстояние между двумя соседними концами якорей.
Зубчатые передачи на отправителе В и приемнике А подсчитаны так, что поворот стрелки на визире В указывает угол β, соответствующий повороту стрелки 1 на приборе А. Чтобы угол β′′ (фиг. 2), составленный осью зрительной трубы и штангой 12 стал равным передаваемому углу β с аппарата В, поворотом штанги 12 около точки b при посредстве рукоятки β′ сближают или удаляют точку 10 от О′′′, а следовательно, и изменяет угол β′′. Передача этого угла на стрелку 2 диска 61 производится с помощью следующего механизма: на оси 67 (фиг. 10), укрепленной в прорезах трубки 37, надета шайба 62, через которую эксцентрично проходит стержень 12. При работе прибора этот стержень может двигаться через шайбу и поступательно и одновременно при изменении своего наклона, поворачивает шайбу вокруг оси 67. Этот поворот с помощью конических шестеренок 63 и 64 передается валику 65, конец которого проходит через центр диска 61 и несет указательную стрелку 2 углов β′. Так как угол β′ может изменяться только в пределах от 0° до 180° и чтобы градусные деления на диске 61 сделать возможно крупными, отношение между шестернями 63-64 взято равным 2, т.-е. повороту шайбы 62 на определенный угол будет соответствовать вдвое больший угол поворота стрелки 2.
Поэтому, чтобы поддерживать угол, равным передаваемому углу, наблюдателю №2 нужно следить, чтобы стрелки 1 и 2 все время были совмещены. Так как при установке на приборе длины базы ось шайбы должна переставляться вдоль трубы, то шестеренка 64 устроена так, что может скользить по валику 65, имеющему по всей длине шпонку (фиг. 10).
Визирная зрительная труба 67 находится внутри трубки 37 и может передвигаться по ее оси, при чем окулярная часть этой трубы выходит через цапфу оправы 37, а об′ективная часть ОБ проходит через соответствующий прорез в трубке 37. Оптическая часть визира состоит во-первых из прямоугольной отражательной призмы 68, помещенной в оправу 72 (фиг. 10′), которая может поворачиваться вместе с призмой вокруг оси 68 (фиг. 8) при помощи штанги 11 (фиг. 10′), проходящей через корпус оправы; во-вторых из отражательной прямоугольной призмы 69, помещенной неподвижно перед об′ектом трубы-визира 70; в-третьих, об′ектива трубы 70, который дает действительное изображение в плоскости крестовины 71 наблюдаемой воздушной цели; в-четвертых, из крестовины 71, которая задает направление визирной линии точкой пересечения нитей и центром об′ектива; в-пятых окуляра ОК, который дает изображение предмета в увеличенном виде.
При работе прибора визир 67 устанавливается так, чтобы расстояние ab соответствовало длине базы и положению этой базы, относительно точки О′′ (место стоянки батареи). Это достигается выдвиганием или выдвиганием визира в трубке 37. После этого при наблюдении за целью, визирная трубка 67 вместе с трубкой 37 поворачивается вокруг оси, проходящей через цапфы трубки 37 и, кроме того, призма 68 поворачивается вокруг оси 68-67. Это двойное перемещение производится тягами 11 и 12, шарнирно соединенными с точкой 10. Из чертежа (фиг. 1) понятно, что эти два одновременно совершающиеся движения визирной трубки дают возможность направить луч, входящий в призму 68 во все точки полусферы, открывающейся над горизонтальной плоскостью, проходящей через прибор.
Для установки прибора А на местности, требуется, чтобы стол прибора Кр был расположен горизонтально и повернут в горизонтальной плоскости так, чтобы ось трубы 37 расположилась по направлению базы АВ. Для этого служит прочная тренога Т, на которую прибор ставится с помощью штатива Ш с тремя установочными винтами 73 и крепительным винтом с рукояткой 74. Штырь 75 и червячное колесо 76 скрепляются намертво со штативом.
Весь прибор насаживается на штырь с помощью полой колонки К, которая внизу имеет фланец, в виде коробки, охватывающей червячное колесо 76. С помощью распорок 78 с этим фланцем скреплена основа коробки прибора Кр. Кроме того, в этом же фланце помещается червяк 77, сцепленный с неподвижным червячным колесом 76, который и служит для поворота прибора вокруг вертикальной оси (фиг. 1).
Для наклона рамы с трубкой 37, как уже было упомянуто раньше служит червяк 34 и червячный сектор 33. Так как эти червячные сцепления, а именно: 33-34 и 76-77 приводятся в действие только при первоначальной установке прибора на местности, то оси этих червяков приводятся в движение с помощью ключей, надеваемых на концы осей, имеющих квадратное сечение и совсем снимающиеся с прибора после установки последнего.
Боковой угломер В снабжен визирной зрительной трубой 25 (фиг. 14), помещаемой на треноге со штативом, снабженным механизмами для передачи прибору А угл. β и телесного угла δ при посредстве синхронно действующей электропередачи (фиг. 13).
Визирная труба 25 ориентируется по базе и приводится в движение двумя дифференциалами для достижения независимости в движениях около оси параллельной базе и около оси перпендикулярной базе.
Автором предусматривается, что:
а) приборы А и В на концах базы АВ могут быть расположены в различных горизонтальных плоскостях, т.-е. база АВ может быть наклонной;
б) батарея может помещаться в любом месте независимо от базы и в любой горизонтальной плоскости;
в) на батарею передаются данные, нужные только для производства непосредственно выстрела, т.-е. можно стрелять по невидимой цели и тем устранить надобность оптического прицела на орудии;
г) величина упреждения получается автоматически для любого промежутка времени и,
д) при наличии оптического дальномера можно пользоваться для управления стрельбой только одним "построителем" А без пользования базой на местности.
Для действия прибора выбирается на местности база АВ. В точке A ставится "построитель", а в точке В - боковой угломер.
Приборы устанавливаются так, чтобы оптические оси окуляров зрительных труб были расположены по линии базы АВ, при чем батарея О располагается совершенно независимо от выбранной базы. Наблюдатель №1 (фиг. 1) вращением рукояток α′ и h′ направляет помощью призмы а входящий в оптическую систему луч на летящий аэроплан С. Это достигается с одной стороны поворотом штанги О′С вокруг точки О′ в горизонтальной плоскости с помощью рукоятки α′ и, с другой стороны вращением рукоятки h′, которая, с помощью соответствующего передаточного механизма подымает или опускает всю зрительную трубку ab над столом прибора А. Таким образом, штанга ас располагается по направлению на летящую цепь С. В это время наблюдатель №2 вращает рукоятку β′, которая посредством передаточного механизма может сближать или удалять точки О′ и С, и устанавливает эти точки так, чтобы линия bc стала параллельной направлению СВ, по которому виден аэроплан С из второго наблюдательного пункта В. Достигается это тем, что наблюдатель №4 с помощью электрической связи передает на стрелку 1 величину угла β, под которым видна цель наблюдателю №4 по отношению к базе АВ в визирной плоскости ABC.
Вращением рукоятки β′ наблюдатель №2 совмещает стрелку 2 со стрелкой 1, что будет соответствовать тому, что направление штанги bc станет параллельно направлению BC, или, что то же, угол cba станет равен углу β.
Расстояние ab устанавливается пропорционально базе AB (напр., 20 мм = 1 км).
| название | год | авторы | номер документа |
|---|---|---|---|
| Дальномер-построитель | 1925 |
|
SU4008A1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 1998 |
|
RU2160429C2 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 2001 |
|
RU2187786C1 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 2002 |
|
RU2230292C1 |
| ДАЛЬНОМЕР С ДВУМЯ ЗРИТЕЛЬНЫМИ ТРУБАМИ, ОБЪЕКТИВЫ КОТОРЫХ РАСПОЛОЖЕНЫ ПО КОНЦАМ БАЗЫ | 1926 |
|
SU7288A1 |
| ПРИБОР УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОГНЕМ | 1926 |
|
SU12643A1 |
| Устройство для алгебраического суммирования углов поворота или угловых скоростей любого числа вращающихся осей | 1932 |
|
SU40863A1 |
| Прибор для геодезической съёмки местности | 1937 |
|
SU62159A1 |
| Приспособление для принятия в расчет угла наклона оси цапф при стрельбе с судов | 1926 |
|
SU8897A1 |
Прибор для получений исходных данных при зенитной стрельбе, состоящий из построителя и бокового угломера, взаимно соединенных синхронной передачей, основанный на пространственном построении в опрокинутом виде геометрической схемы база-цель, характеризующийся применением для построения схемы трубки 37, воспроизводящей базу, двух рычагов 11 и 12, воспроизводящих линии визирования с построителя и бокового угломера, и линейки 8, дающей горизонтальную дальность до цели от батареи, положение каковой батареи определяется центром вращения этой линейки на столе, снабженном наверху цыферблатом 56 и планшетом Пл с графической таблицей стрельбы и линейками: высотовой 46, упрежденных дальностей 59 и упрежденных углов местности ОС′′, а внизу винтом 31 для подымания и опускания базы 37 и червяком 34 для наклонения помощью сектора 33 этой базы параллельно базе на местности, а по сторонам - маховичками для установки всех частей прибора, из каковых маховичков маховичок h′ служит для установки высоты, как в геометрической схеме, так и на планшете Пл, маховичок α′ - для установки азимута текущего в геометрической схеме и текущего и упрежденного на цыферблате 56, a маховичок β′ - для установки текущей дальности в геометрической схеме помощью дифференциала 6, 18-25 и дальности текущей и упрежденной на планшете помощью упредительного механизма (фиг. 2 и 3 лист 4) с дифференциалом 26, 49-55 и тормозным приспособлением 47, 52, 54, 55, для построения упреждения по визиру и задаваемому времени, каковые маховички служат для установки при построении схемы визирной трубы с отражательной головкой 68, а при повороте рычага 12 с шайбой 62 - для установки стрелки 2, предназначенной при правильной работе прибора покрывать стрелку 1, устанавливаемую синхронной передачей с бокового угломера, состоящего из треноги и визирной трубы 25 (лист 6), ориентируемой по базе и приводимом в движение двумя дифференциалами для достижения независимости в движениях около оси параллельной базе и около оси перпендикулярной базе.
