1
Изобретение предназначено для счета алектрических импульсов в малогабаритных, экономичных и легких приборах, работающих при воздействии больших внешних ускорений (линейных, ударных и вибрационных) и требующих высокой скорости счета при отсутствии погрешности показаний и большом ресурсе работ.
В качестве счетчиков электрических импульсов применяют счетчики с 1шзкой устойчивостью к воздействию внешних ускорений, имеющие большие габариты, вес и потреб- пяемую мощность. Они содержат храпбвые механизмы обратного действия, которые способны удерживать набранные показания при воздействии внешних ускорений. Но такие счетчики имеют либо сильно завышенные начальные моменты возвратных пружин, либо специальный дополнительный электромагнит, блокирующий основной электромагнит в исходном положении, что дает низкий к. п. д.
Предложенный электромеханический счет чик позволяет повысить скорость и точность счета.
Это достигается тем, что в него введены храповой механизм прямого действия, рычаги с подпружиненными собачками, прич рычаги, снабженные пружиннылш ограничителями, связаны с якорями, выполненными в виде цилиндрических секторов, закрепленных на общей оси и помещенных в магнитном поле электромагнита, а оба храповых механизма снабжены тройными пластинчаты возвратными пружинами,
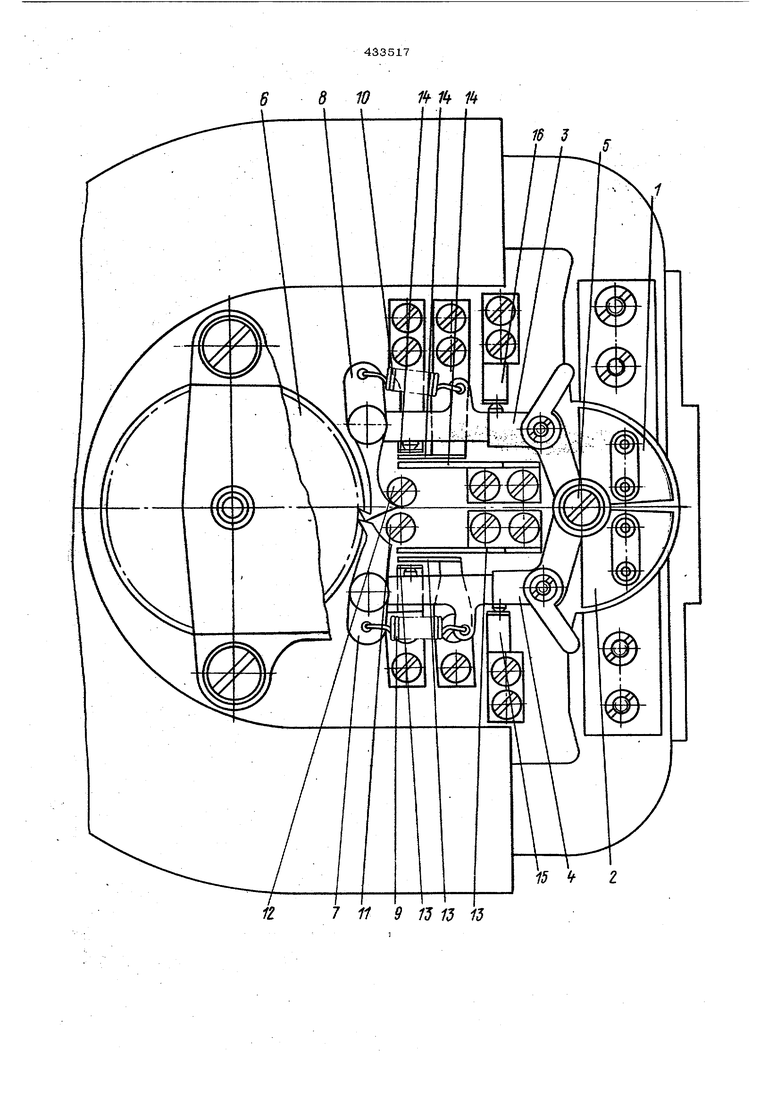
. На чертеже представлен механизм электромеханического счетчика импульсов, .который состоит из следующих основных узлов: электромагнита с якорями 1 и 2, закрепленными на рычагах 3 и 4, имеющих общую ось 5, и двух храповых механизмов прямого и обратного действия с храповым колесом 6 (включающих подпружиненные собачки 7 и 8, закрепленные на рычагах 3 и 4), пружинами 9 и 1О, упорами собачек 11 и 12, тройными пластинчатыми возвратными пружинами 13, 14. В исходном положении с рычагами взаимодействует только одна пружина, а в конечном положении все три пружины. Пружинные ог343раничители 15 и 16 являются упорами, определ юиш ш исходные положегшя рыча- ROB, а конечные их положения определяются точками равенства моментов возвратны пружин и динамического тягового момента электромагнита. Якори электромагнитов имеют форму не полных цилиндрических секторов, а оба як ря, сложенные вместе прямыми рабочими поверхностями, образующими в исходном положении механизма рабочий зазор электромагнита, имеют форму цилиндрического сегмента. При подаче электрического импульса на : обмотку электромагнита между якорями ; появляется плавно нарастающий тяговый момент. Так как момент возвратной пружи ;ны в исходном положении рычагов для ; храпового механизма обратного действия .меньше, чем у механизма прямогодействи механизм обратного действия первым приходит в движение и храповое колесо 6 разблокировывается. Когда механизм об- ратного действия пройдет около половины своего хода (1/4 хода всего механизма счетчика), моменты возвратных пружин сравняются и храповой механизм прямого действия придет в движение. Собачка 7 повернет храповое колесо 6 на 4О% от велишны. его полного шага, а собачка 8 обратного действия пройдет навстречу движению храпового колеса путь, соответствующий 6О% от его полного шага, и западет в следующий зуб храпового колеса 6. Собачка 8 обратного действия повернет храповое колесо 6 еще на 60% от его полного шага, а собачка 7 прямого действия пройдет навстречу движению храпового колеса путь, соответствующий 40% его полного шага, и западет в следующий зуб фапового колеса. Таким образом, от воздействия каждого входного электрического импульса колесо поворачивается на один зуб. Предмет изобретения Электромеханический счетчик импульсов, содержащий электромагнит, якорь, храповой механизм обратного действия и зубчатую передачу, отличающийся тем, что, с целью повышения скорости и точности счета, в него введены храповой механизм прямого действия, рычаги с подпружиненными собачками, причём рычаги, снабженные пружинными ограничителями, связаны с якорями, выполненными в виде цилиндрических секторов, закрепленных на общей оси и помещенных в магнитном поле элек ромагнита, а оба храповых механизма снабжены тройными пластинчатыми возвратными пружинами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный шаговой двигатель | 1976 |
|
SU548925A2 |
| ЭЛЕКТРИЧЕСКИЙ ИЗВЕЩАТЕЛЬ ДЛЯ СИГНАЛИЗАЦИОННЫХ УСТРОЙСТВ | 1936 |
|
SU52380A1 |
| Механизм для накопления телеграфных сигналов | 1938 |
|
SU55666A1 |
| Счетчик числа оборотов вала | 1932 |
|
SU31684A1 |
| Устройство для измерения кривизны буровых скважин | 1940 |
|
SU73116A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ С ДЕШИФРАТОРОМ ДЛЯ ЗНАКОВ МОРЗЕ | 1926 |
|
SU6809A1 |
| Счетчик слов для аппарата Бодо | 1936 |
|
SU54178A1 |
| Счетная машина | 1934 |
|
SU49498A1 |
| Привод прижимного устройства скважинного прибора | 1977 |
|
SU699163A1 |
| Устройство для управления на расстоянии | 1931 |
|
SU31490A1 |