1
Изобретение относится к области формирования и обработки сигналов на основе стимулированного излучения и может быть использовано для различных устройств контроля и измерения габаритных размеров и расстояний до движущихся или стационарно расположенных объемных объектов.
Известные устройства для бесконтактного (дистанционного) определения расстояний до движущихся или стационарно расположенных объемных объектов, содержащие источник когерентного излучения, модулятор и оптическую систему пространственной ориентации излучения, основаны на измерении времени запаздывания сигнальных импульсов относительно зондирующих, а также фазового или частотного сдвига между модулированными сигналами излучения и принимаемыми сигналами. Измерение габаритных размеров этими устройствами основано на точном пространственном сканировании излучателя.
Однако одновременное измерение габаритных размеров и расстояний приводит к усложнению систем, что затрудняет их практическое применение. Кроме того, эти устройства имеют ограничения как по точности измерения, так и по работоспособности в области малых размеров объектов (1-2 м) и расстояний до них (15-10 м).
При импульсном зондировании это обусловлено конечной длительностью импульса излучения, например при зондирующем импульсе 0,1 МКС минимальная разрешимая
дальность 20 м. В случае частотно-, фазовокли амплитудно-модулпрованного излучения, к функциональным узлам системы предъявляются высокие требования, что ограничивает точностные характеристики устройства, например в фазовом дальномере с Р мо.г - 1 Мгц и угловым разрешением 20Мрад минимально измеряемый габаритный размер 2 м. Хотя есть точные дальномеры, такие как КДГ-З, АСА - 8, измеряющне расстояние в 700-1500 м с абсолютной погрешностью порядка .3-30 см, для получения таких рез)льтатов они используют оптические отражатели (телескопического или триплексного типа). Это существенно снижает возможность их применения, особенно в различных автоматических комплексах.
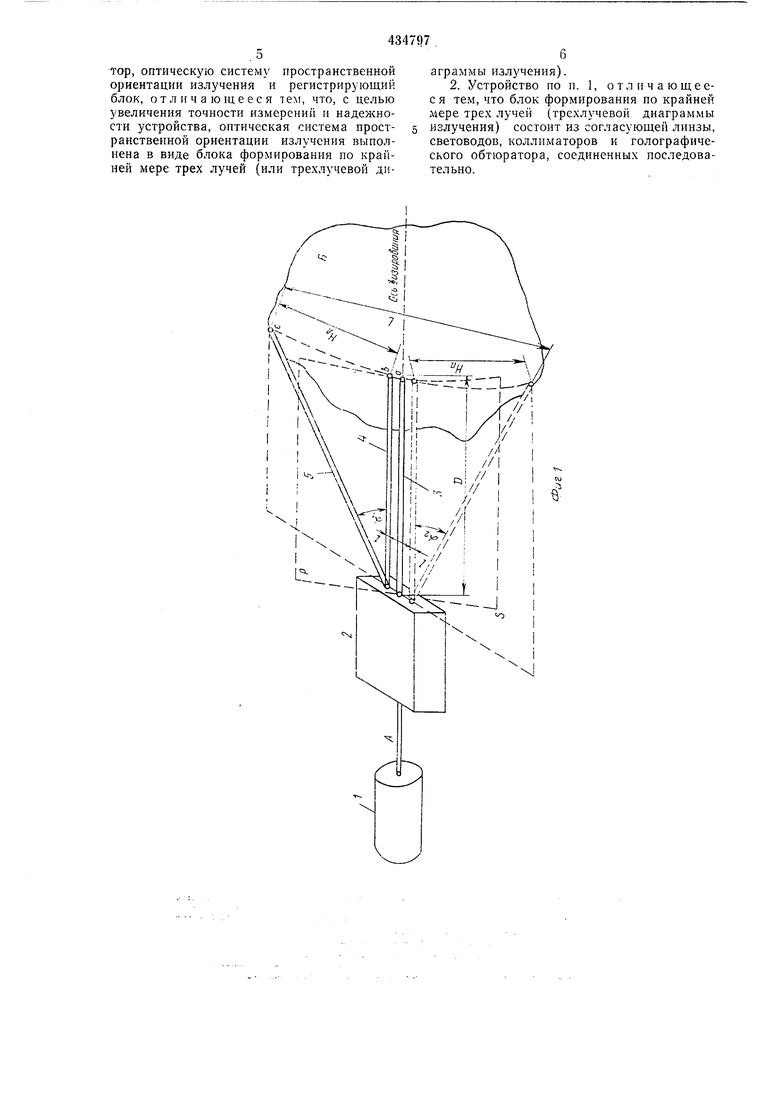
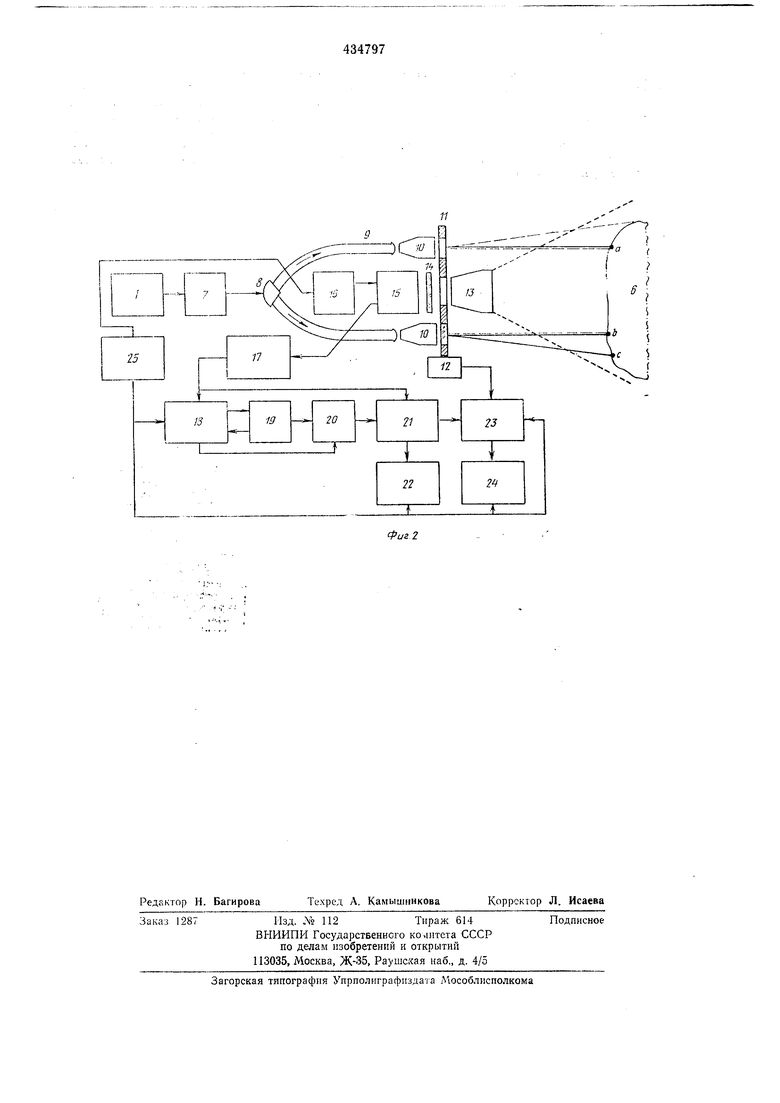
Предлагаемое устройство обеспечивает высокую точность н надежность работы н одновременность измерения габаритных размеров объекта н расстояния до него. Оно позволяет расщирить диапазон измеряемых величин в области малых значений, проводить измерения автоматически прн любой освещенности и без каких-либо выносных и вспомогательных ориентиров. Это достигается тем, что в устройство введена снециальная схема, формирующая трехлучевую диаграмму излучения, а также узлы, использующие особенности и преил1ущества когерентной оитики и голографии. На фиг. 1 показана обобщенная функциональная схема устройства для одновременного измерения размеров объемных объектов и расстояний до них; на фиг. 2 - блок-схема иредлагасмого устройства. Луч лазерного излучателя 1, амплитудная модуляция которого обеспечивает падежное выделение сигнала на фоне засветки с длиной волны, близкой к излучаемой, в блоке 2 формирования и обработки сигналов расщенляется на три луча. Первый коллимированный луч 3 (опорный) нанравляется параллельно или вдоль оси визироваиия в плоскости 5. Второй коллимированный луч 4 (масштабный) идет также нараллельио оси визироваиия в плоскости 5. Расстояние / между лучами 3 и 4 является для предлагаемого устройства пространственным эталоном длины (внутренним масштабом), нереносимым без искаженнй на любое расстояние D. Третий коллимированный луч 5 (отсчетный) также расположен в нлоскости S и выходит из той же точки, что и луч 4, но под некоторым точно известным углом а. На поверхности измеряемого объемного объекта 6 эти лучи образуют три яркостные отметки а, Ь, с, лежащие в одной плоскости 5. Их регистрирует онтико-электронный приемно-преобразующий канал блока 2 формирования и обработки сигиалов (фиг. 1). Габаритный размер L (см) объекта измеряют путем вычисления по формуле L.,(l+). где Яп , см и Яд , см - измеренное расстояние между отметками луча 4 и луча 5 справа и слева от линии визирования (второе положеиие лучей показано на фиг. 1 пунктиром). Расстояние/) (см) оиределяют путем измереиия HI с последующим вычислением по формуле D l(H-Jl ctg а). Лазериый луч, излученный ОКГ и нромодулированный по амплитуде модулятором 7, поступает на согласующую линзу 8, обеспечивающую полиую передачу энергии излучением в световоды 9, лежащие в одной нлоскости. Выходные торцы световодов соединеиы с коллимирующими объективами 10, расстояиие между оптическими осями которых равно масщтабной величине /. Коллимированное излучение с выхода объективов ностуиает на многоиозиционный голографический обтюратор 11, снабженный датчиком 12 номера углового расхождения. Обтюратор может быть выполнен, например, в виде диска с отверстиями, расположенными по одной окружности (диаметром /), иричем все они образуют диаметральные пары, число которых четно. , Все пары отверстий объединены в груииы по два. В каждой паре такой группы в одно из отверстий вставлена управляющая голограмма, обеспечивающая формирование лучей 4 и 5, причем в группе,-эти голограммы одинаковы, по находятся с противоположных сторон. Такое размещенпс управляющих голограмм обеспечивает получение Н„ и Я ., в двух последовательных измерениях, что упрощает программу вычисления L. Яркостныс отметки па объемном объекте воспринимаются приемным объективом 13 и через полосовой светофильтр 14, отсеивающий возможные посторонние засветки от излучения других длин волн, передаются на оптико-электронный преобразователь 15, например, типа видикон, который снабжен строчным развертывающим узл ом 16. Трехимиульсный выходной сигнал, получаемый с оптнко-электронного преобразователя в каждый цикл развертки, поступает на формирователь 17 сигнала, а затем на цифровой регистратор 18 масштаба, который заполняется от генератора 19 с управляемой частотой следования импульсов. Цифровой регистратор масщтаба изменяет частоту следования импульсов генератора 19 до тех пор, пока интервал между импульсами, соответствующими отметкам ог опорного н масщтабного лучей, не заполнится установленным числом импульсов. Только после выполнения этой операции открывается клапанный узел 20 и проводится регистрация Я; цифровым регистратором 21 габаритов с последующей передачей результата на суммирующий индикатор 22 габарита. Кроме того, одновременно результат изменення Я/ вместе с сигналом от датчика 12 номера углового расхождения ноступает в вычислитель 23 дальности, иредставляющий собой множительиое устройство. Результат вычисления D передается на индикатор 24 расстояния. Сиихронизация всех операций в блоке формирования и обработки сигналов осуществляется узлом 25 тактовых унравляюо. сигналов. Измерение размеров и расстояний при произвольном положении плоскости , например, в положении плоскости Р (см. фиг. 1) осуществляется путем поворота узлов 1, 7, 8, 9, 10, 12 и 16 на соответствующий угол. В этом случае алгоритм работы устройства сохраняется без каких-либо изменений. Формула изобретения I. Устройство для одновременного измерения размеров и расстояний, содержащее источник когерентного излучения, модулятор, оптическую систему пространственной ориентации излучения и регистрирующий блок, отличающееся тем, что, с целью увеличения точности измерений и надежности устройства, онтическая система пространственной ориентации излучения выполнена в виде блока формирования по крайней мере трех лучей (или трехлучевой диаграммы излучения).
2. Устройство по п. 1, отличающеес я тем, что блок формирования по крайней мере трех лучей (трехлучевой диаграммы излучения) состоит из согласующей линзы, световодов, коллиматоров и голографического обтюратора, соединенных последовательно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ С ОБЪЕМНОЙ ФУРЬЕ-ГОЛОГРАММОЙ | 2013 |
|
RU2539755C2 |
| Способ голографического контроля волновых аберраций линз и объективов | 1991 |
|
SU1772608A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 1998 |
|
RU2195694C2 |
| Устройство для измерения размеров элементов плоскопараллельных объектов | 1981 |
|
SU1006909A1 |
| ГОЛОГРАФИЧЕСКОЕ ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО | 1990 |
|
SU1813298A3 |
| СПОСОБ РЕГИСТРАЦИИ ПЛАНКТОНА | 2016 |
|
RU2623984C1 |
| Способ получения интерферограммы для контроля качества линз и объективов | 1990 |
|
SU1712779A1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
| ГОЛОГРАФИЧЕСКИЙ КОЛЛИМАТОРНЫЙ ПРИЦЕЛ С СИНТЕЗИРОВАННЫМ ЗРАЧКОМ | 2015 |
|
RU2647516C2 |
| Устройство для регистрации быстропротекающих процессов | 1977 |
|
SU778539A1 |