Изобретение относится к океанологическим исследованиям и предназначено для проведения океанологических (гидробиологических) исследований планктона.
Известен способ определения размерно-количественных характеристик взвешенных в воде частиц. Способ заключается в формировании реперного объема оптическим путем, передаче в заранее установленном направлении параллельного потока прямоугольного сечения импульсного оптического излучения постоянной интенсивности. Сформированный реперный объем перемещают по траектории, перпендикулярной направлению потока излучения и большей стороне его прямоугольного сечения, и регистрируют взвешенные в воде частицы при появлении их в реперном объеме путем приема оптического излучения из реперного объема под любым углом к нему. Оптическое излучение преобразуют в электрические сигналы, анализируют их, причем по амплитуде и длительности сигналов судят о размерах и количестве частиц. Предложено отношение размеров сторон прямоугольного сечения приравнять к отношению максимальной и минимальной границ размерного диапазона регистрируемых частиц, а скорость перемещения реперного объема удерживать на уровне, не превышающем отношение длины меньшей стороны сечения ко времени периода частоты следования импульсов оптического излучения (RU № 2112955, МПК6 G01N 15/14, G01N 21/85).
Недостатки аналога - низкая различительная способность, слабая детализация изображения, поскольку фактически оценивается величина, косвенно связанная с биомассой.
Известен также способ регистрации планктона, реализованный с помощью судового оптоэлектронного измерителя планктона (RU 131181 U1), принятый за прототип. Способ заключается в генерации параллельного потока импульсного оптического излучения, формировании оптическим путем реперного объема прямоугольного сечения, перемещении этого реперного объема, приеме оптического излучения и преобразовании его в электрические сигналы, регистрации изменения амплитуды электрических импульсов, определении разности между сигналом в отсутствие импульсов и сигналом, полученным во время воздействия импульсами, и формировании временного интервала на время регистрации частиц планктона, находящихся в реперном объёме.
В качестве средства для приема и преобразования оптического излучения в электрические сигналы в измерителе применена цифровая видеокамера, содержащая фотоприемную матрицу для измерения размеров тени планктона в двух взаимно перпендикулярных направлениях. В состав измерителя включен процессор, управляющий режимом работы измерителя.
Устройство, в котором реализуется способ-прототип, позволяет производить прямой подсчет планктона на заданной глубине. Но поскольку в целях измерений используется зарегистрированное теневое изображение, являющееся заведомо расфокусированным, различительная способность и контрастность изображения очень низки. Низкая детализация приводит к малой информативности измерений, в частности, способ не пригоден для изучения размерно-видового разнообразия планктона, ограничивая результаты оценкой биомассы. Низкая контрастность не позволяет регистрировать несколько реперных объемов на один кадр экспозиции камеры, т.е. увеличить исследуемый объем и повысить репрезентативность выборки, особенно в водах с низким содержанием планктона.
В качестве ближайшего аналога выбран способ, описанный Дёминым В.В. и др.: Цифровая голография планктона / В.В.Демин, А.С.Ольшуков, Наумова Е.Ю., Мельник Н.Г. // Оптика атмосферы и океана. – 2008 – Т. 21 – № 12. – С. 1089-1095. Регистрацию планктона осуществляют с помощью источника когерентного излучения, а регистрация цифровых голограмм осуществляется непосредственно на ПЗС-камеру, не используя оптическую систему.
Недостатки прототипа: поперечное сечение исследуемого объёма невелико и ограничено размером используемой ПЗС-матрицы, контрастность получаемого изображения недостаточна для полной идентификации объекта.
Техническая задача изобретения заключается в создании способа регистрации планктона, обеспечивающего повышенную различительную способность и контрастность изображения, позволяющего увеличить регистрируемый объем и повысить репрезентативность выборки.
Эта задача решается за счет того, что, как и в прототипе, формируют изучаемый объем среды путем передачи в выбранном направлении коллимированного потока импульсного оптического излучения и осуществляют фотоэлектрическую регистрацию теневого изображения этого объема вместе с взвешенными в нем частицами.
В отличие от прототипа, теневое изображение, согласно изобретению, регистрируют как цифровую осевую голограмму Габора. При регистрации цифровой голограммы используют приёмную оптическую систему, которая, в отличие от проекционной оптической системы, не строит на ПЗС-камере сфокусированных изображений планктонных частиц, т.е. снимает ограничение на размер регистрируемого объёма с планктонными частицами.
Затем цифровым путем послойно восстанавливают с голограммы изображение объема с учётом приёмной оптической системы и с обработкой информации в каждом сечении известными численными методами. В результате получают размерные и количественные характеристики частиц, взвешенных в изучаемом объеме.
Задача в части увеличения изучаемого объема и, следовательно, репрезентативности выборки решается также за счет последовательной регистрации в течение одной экспозиции голограмм нескольких изучаемых объемов (наложенных голограмм), сформированных путем отправления последовательности импульсов лазера. Режим последовательности импульсов реализуется посредством управления длительностью и скважностью импульсов лазерного излучения, а также заданием времени фотоэлектрической экспозиции.
Сущность способа и возможность его осуществления поясняется на примере работы конкретного устройства, которое показано на фигурах 1–5.
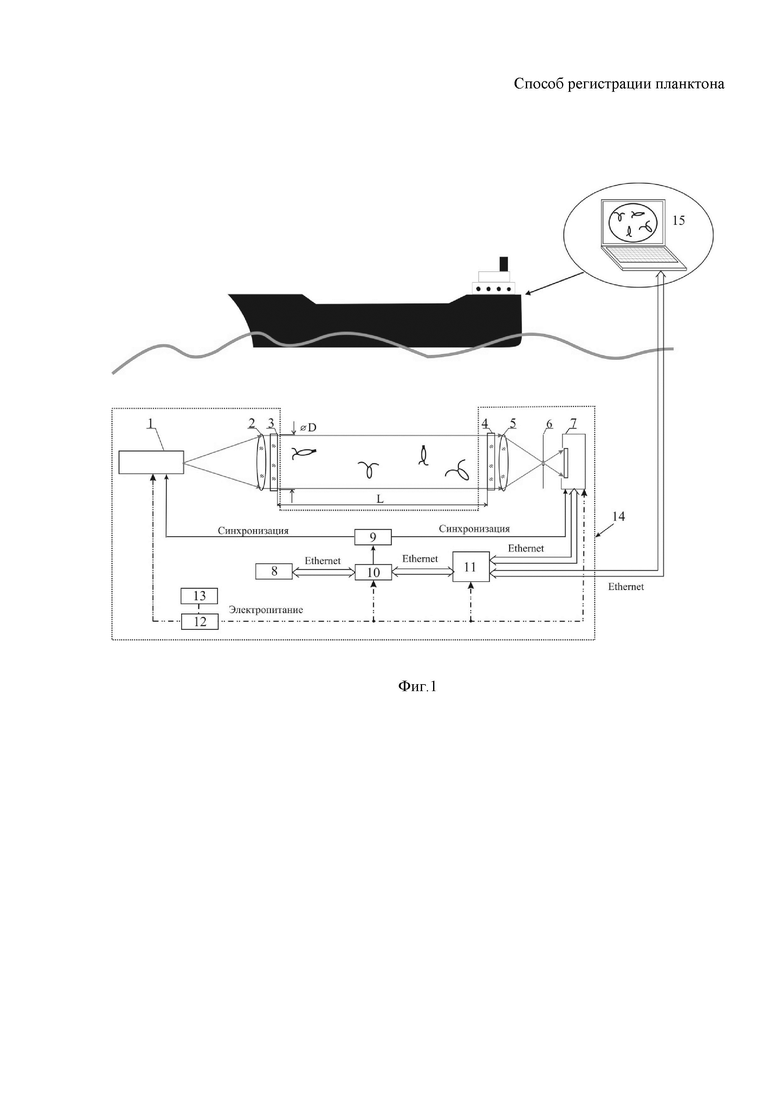
На фиг.1 представлена структурная схема устройства, предназначенного для сбора информации об исследуемом планктоне, её предварительной обработки, сохранения информации в устройстве записи и/или передачи данных непосредственно на бортовой компьютер судна.
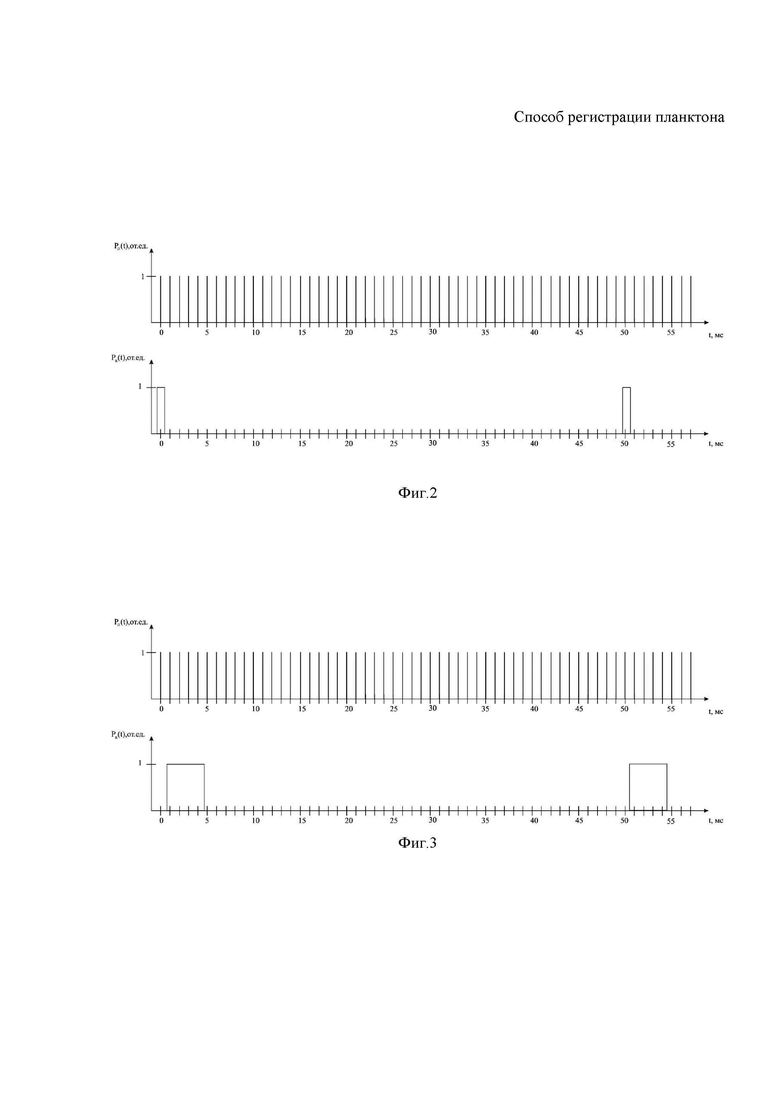
На фиг.2 представлены временные диаграммы генерации лазерного излучения Pл(t) и срабатывания затвора камеры Pк(t) в режиме записи одиночных голограмм.
На фиг.3 представлены временные диаграммы генерации лазерного излучения Pл(t) и срабатывания затвора камеры Pк(t) в режиме записи наложенных голограмм.
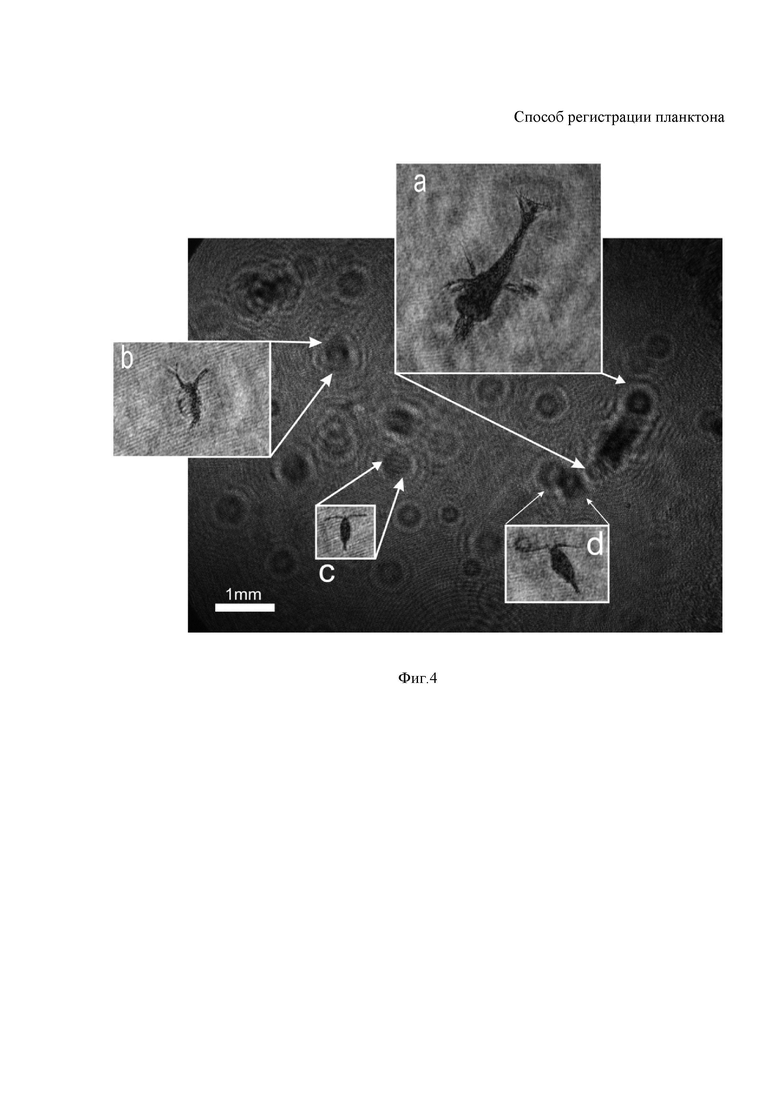
На фиг.4 представлены цифровая голограмма (она же - теневое изображение с тонкой структурой) исследуемого объема, полученная с помощью одного импульса полупроводникового лазера, и изображения планктонных частиц, восстановленные с неё в различных сечениях объёма.
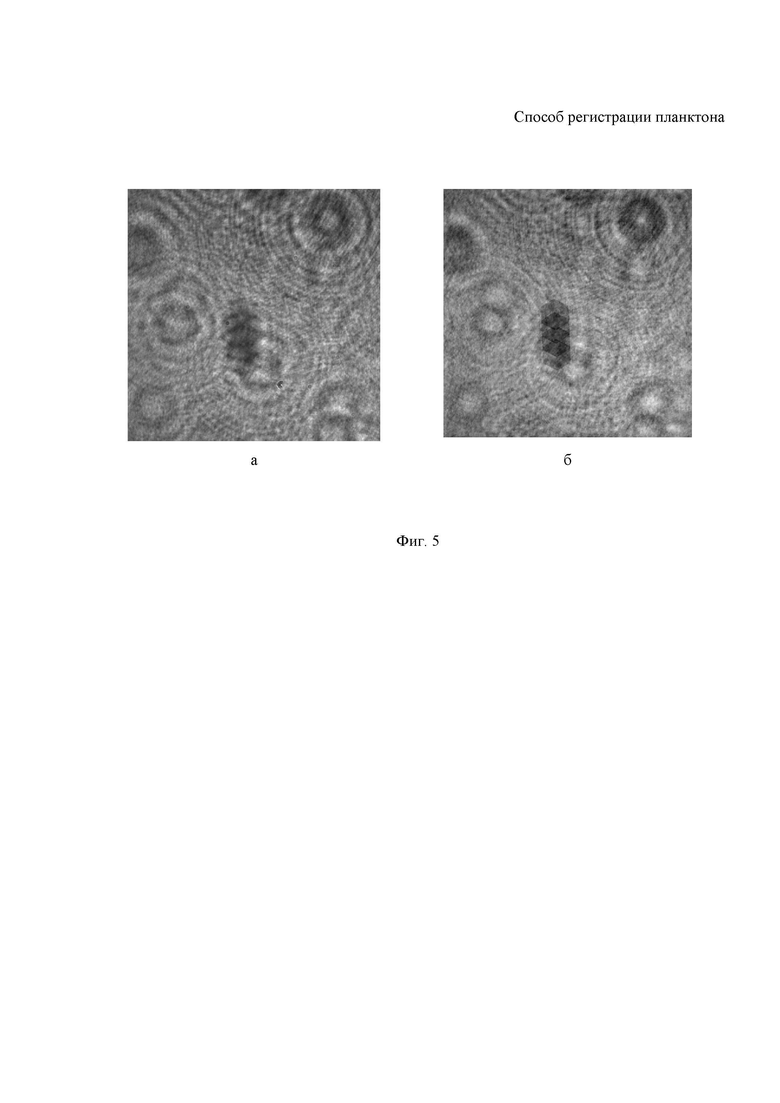
На фиг.5 представлены цифровое фото четырех наложенных голограмм тестовой частицы размером 1 мм, движущейся в исследуемом объеме (а), и последовательность голографических изображений этой частицы, восстановленные с цифровых голограмм известными численными методами (б).
Основными структурными элементами схемы (фиг.1) являются: лазерный излучатель 1; матричное фотоприемное устройство 7; центральное процессорное устройство (ЦПУ) 10; постоянное запоминающее устройство (ПЗУ) 8; блок синхронизации 9, блок интерфейсов (БИ) 11; блок питания (БП) 12; аккумуляторная батарея (АБ) 13 и бортовой компьютер (БК) 15. Также имеются иллюминаторы 3 и 4, объектив 5, пространственный фильтр 6. Все эти структурные элементы скомпонованы в собственно герметичное погружное устройство 14.
Импульсный полупроводниковый лазер МЛ126-0660-050 (производство компании LT&T, λ=660 нм, мощность P=50 мВт) используется в качестве источника света, освещающего исследуемый объем воды с планктоном. Пучок лазерного света, сформированный объективом 2, создает на светочувствительной матрице камеры распределение интенсивности поля, рассеянного исследуемым объемом и взвешенными в нем частицами. Объем V, фиксируемый одним импульсом лазера, определяется диаметром полевой диафрагмы D=22,5 мм и расстоянием L между иллюминаторами 3 и 4 погружного устройства L=294 мм. Для схемы, представленной на фиг.1, объем составляет  .
.
В качестве фотоприемного устройства используется монохромная смарт-камера VRmD3FC-42M-COB компании VRmagic, выполненная на базе CMOS светочувствительной матрицы размером n x n = 2048 х 2048 пикселей с размером каждого пикселя r x r= 5,5 х 5,5 мкм. Камера регистрирует в плоскости светочувствительной матрицы и передаёт в ЦПУ распределение интенсивности лазерного излучения, рассеянного исследуемым объемом. Разрешение матрицы и ее размеры достаточны для того, чтобы зарегистрировать тонкую структуру этого распределения интенсивности, и распределение представляет собой цифровую голограмму Габора. В работе [5] показано: для того чтобы теневое изображение частицы размером d, расположенной на расстоянии z от плоскости регистрации, можно было считать голограммой Габора, необходимо, чтобы выполнялись следующие соотношения: для размера r пикселя матрицы:  , где d – размер частицы; для полуширины R0 матрицы
, где d – размер частицы; для полуширины R0 матрицы 

Из формулы Ньютона для идеальной линзы известно:
где x, x’ - положение предмета и его изображения относительно соответственно переднего и заднего фокусов объектива. Тогда для объектива с фокусным расстоянием  для частицы, расположенной на расстоянии
для частицы, расположенной на расстоянии  от объектива, получим
от объектива, получим 
Для матрицы смарт-камеры VRmD3FC-42M-COB имеем:
- размер частицы d, тонкая структура которой может быть уверенно зарегистрирована,
d > 10 r или  ,
,
- полуширина матрицы R0 достаточна для регистрации голограммы Габора этой частицы, при условии расположения ее на расстоянии  от матрицы:
от матрицы:

Объектив 5 (см. фиг.1) расположен перед камерой и служит для согласования размеров светочувствительной матрицы и поперечных размеров регистрируемого объема. Помимо этого, в заднем фокусе этого объектива при необходимости может быть установлен пространственный фильтр 6 с целью повышения контрастности слабоконтрастных изображений планктонных частиц и организации телецентрического хода лучей при проведении оптических измерений размеров методом теневого изображения. ЦПУ 10 представляет собой вычислительное устройство погружного устройства 14. ЦПУ выполняет функции управления режимами работы, блоком синхронизации 9 лазера и камеры, передаёт данные в ПЗУ, а также осуществляет первичную обработку кадров, поступающих с камеры в режиме реального времени. В качестве ЦПУ может быть использован малогабаритный компьютер модели PICO821 компании Axiomtek.
ПЗУ 8 записывает зарегистрированные голограммы, инициализационные данные, историю перемещений (навигационный трек), а также историю состояний устройства. Блок интерфейсов 11 обеспечивает коммутацию и электрическую совместимость внутренних интерфейсов с внешними информационными и электрическими интерфейсами различных погружаемых аппаратов, в составе которых работает ЦПУ. Блок питания 12 обеспечивает электропитание узлов и блоков от аккумуляторных батарей 13.
Голограммы просвеченного объема, зарегистрированные камерой, могут записываться в ПЗУ и/или непосредственно передаваться по волоконно-оптической линии связи на бортовой компьютер БК, расположенный на НИС (научно-исследовательское судно) по последовательному высокоскоростному интерфейсу. В стационарных условиях на борту НИС голограммы обрабатываются следующим образом: с каждой зарегистрированной голограммы восстанавливают изображения всех частиц, определяют их размеры и взаимное расположение, производят статистическую обработку и интерпретируют результаты исследований. Для цифровой обработки голограмм используется специальное программное обеспечение, основанное на известных алгоритмах восстановления цифровых голограмм [6].
Диаграммы, приведенные на фиг.2, показывают, что в режиме записи одиночных голограмм частота срабатывания камеры составляет Fк=20 Гц, длительность экспозиции камеры tк=10 мкс, частота повторения импульсов лазера Fл=1 кГц, длительность импульса лазера tл=5 мкс. При этом затвор камеры и сигнал, управляющий импульсом лазера, синхронизированы таким образом, что на одно время экспозиции камеры приходится один импульс лазера. С учетом оптической схемы регистрации за одну секунду регистрируются частицы в объеме около 2,5 л.
Диаграммы, приведенные на фиг.3, показывают, что частота срабатывания камеры в режиме наложенных голограмм по-прежнему составляет Fк=20 Гц, но длительность экспозиции камеры tк=5 мс, частота повторения импульсов лазера составляет Fл=1 кГц, длительность импульса лазера составляет tл=5 мкс. При этом затвор камеры и сигнал, запускающий лазер, синхронизированы таким образом, что на одно время экспозиции камеры приходится пять повторений импульса лазера. В этом случае за одну секунду регистрируются частицы в объеме около 10 л.
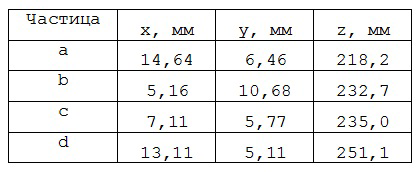
Изображения, восстановленные цифровым путем с голограммы, представленной на фиг.4, позволяют уверенно определять видовое разнообразие планктона, измерять размеры особей и их расположение, что невозможно сделать, располагая только теневым изображением объема. В частности, по изображениям частиц a, b, с, d (восстановлены с голограммы фиг.4) можно определить характерные размеры частиц в различных сечениях объема: a - длина 1270 мкм, толщина 327 мкм; b - длина 633 мкм, толщина 187 мкм, толщина усиков 40 мкм; c - длина 275 мкм, толщина 77 мкм, толщина усиков 15 мкм; d - длина 434 мкм, толщина 155 мкм, толщина усиков 20 мкм. Если задать начало координат x, y, z в левом нижнем углу плоскости, в которой располагалась ПЗС–матрица на этапе регистрации, то по восстановленным голографическим изображениям можно определить пространственное расположение частиц в момент регистрации:
Информация, полученная прямой обработкой теневого изображения, также является полезной в силу того, что она выполняется быстро и без привлечения больших вычислительных ресурсов. Она может быть использована, например, в качестве критерия необходимости перехода от регистрации одиночных голограмм к наложенным голограммам и обратно, в зависимости от концентрации планктона в месте измерения.
Результаты эксперимента с наложенными голограммами показывают возможность увеличения исследуемого объема в 5 раз по сравнению с прототипом без потери качества восстановленных изображений. Помимо этого, по восстановленному голографическому изображению была определена поперечная скорость движения тестируемого объекта v=0,262 м/с. Как показывает данный пример, способ по изобретению, в отличие от аналогов, позволяет определить количество планктонных особей в объеме, их размеры, форму, следовательно, позволяет получать не только интегральную оценку биомассы, но, благодаря повышенной различительной способности и контрастности изображения, дифференцирует информацию об исследуемом объекте по размерам, расположению, количеству и видам особей.
Промышленное применение изобретения: научные исследования биологических ресурсов Мирового океана, оборудование судов промразведки с целью получения информации о кормовой базе рыбных запасов, исследования невозмущенных планктонных частиц в среде обитания (концентрация планктонных особей, распределение по видам и размерам, траектория движения, форма и ориентация) в задачах экологии, рационального природопользования, диагностики и охраны окружающей среды.
Библиография
1. US 4637719, кл. G01N 21/85, 1987.
2. SU № 1321212, МПК7 G01N 15/14.
3. RU № 2112955, МПК6 G01N 15/14, G01N21/85.
4. RU № 131181 U1, МПК G01N 15/14, 2013.
5. Оленин А.Л., Парамонов А.А. Разработка многоканального гидролого-оптико-химического комплекса для океанологических исследований на подвижных измерительных платформах. // Материалы конференции X Международная научно-техническая конференция «Современные методы и средства океанологических исследований» Часть III, Москва 2007, стр. 154-160.
6. Schnars U. Digital Hologram Recording, Numerical Reconstruction, and Related Techniques / Schnars U., Jueptner W. – Berlin: Sprinder, 2005. – 164 p.
7. Цифровая голография планктона / В.В. Дёмин, А.С. Ольшуков, Е.Ю. Наумова, Н.Г. Мельник // Оптика атмосферы и океана. – 2008 – Т. 21 – № 12. – С. 1089–1095 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БИОИНДИКАЦИИ ЭКОЛОГИЧЕСКОГО СОСТОЯНИЯ АКВАТОРИИ ПОСРЕДСТВОМ МОНИТОРИНГА ПЛАНКТОНА | 2018 |
|
RU2691553C1 |
| СПОСОБ РЕГИСТРАЦИИ ИНТЕГРАЛЬНЫХ РАЗМЕРНО-КОЛИЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ПЛАНКТОНА | 2018 |
|
RU2690976C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРНО-КОЛИЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЗВЕШЕННЫХ В ВОДЕ ЧАСТИЦ | 2012 |
|
RU2524560C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗМЕРНО-КОЛИЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЗВЕШЕННЫХ В ВОДЕ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2112955C1 |
| ЦИФРОВОЙ ГОЛОГРАФИЧЕСКИЙ МИКРОСКОП | 2013 |
|
RU2545494C1 |
| Голографический вершинный детектор | 1983 |
|
SU1126105A1 |
| УСТРОЙСТВО АНАЛИЗА ВЗВЕШЕННЫХ ЧАСТИЦ | 2021 |
|
RU2767953C1 |
| СПОСОБ ОДНОВРЕМЕННОЙ ТЕНЕВОЙ ХРОНОГРАФИЧЕСКОЙ РЕГИСТРАЦИИ УДАРНО-ВОЛНОВЫХ И ПЛАЗМЕННЫХ ПРОЦЕССОВ | 2021 |
|
RU2770751C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ЖИДКОСТЯХ И ГАЗАХ | 2009 |
|
RU2387976C1 |
| Голографический вершинный трековый детектор | 1981 |
|
SU972948A1 |
Способ регистрации планктона включает в себя формирование изучаемого объема среды путем передачи в выбранном направлении импульсного оптического излучения и регистрацию теневого изображения в виде цифровой осевой голограммы Габора. Затем восстанавливают с голограммы послойно изображение объема с обработкой информации в каждом сечении. Во время реализации способа регистрируют временную последовательность наложенных голограмм Габора, которые формируют посредством управления длительностью и скважностью импульсного оптического излучения, и временем фотоэлектрической регистрации. Технический результат – повышение различительной способности и контрастности изображения, повышение репрезентативности результатов за счет увеличения регистрируемого объема. 5 ил.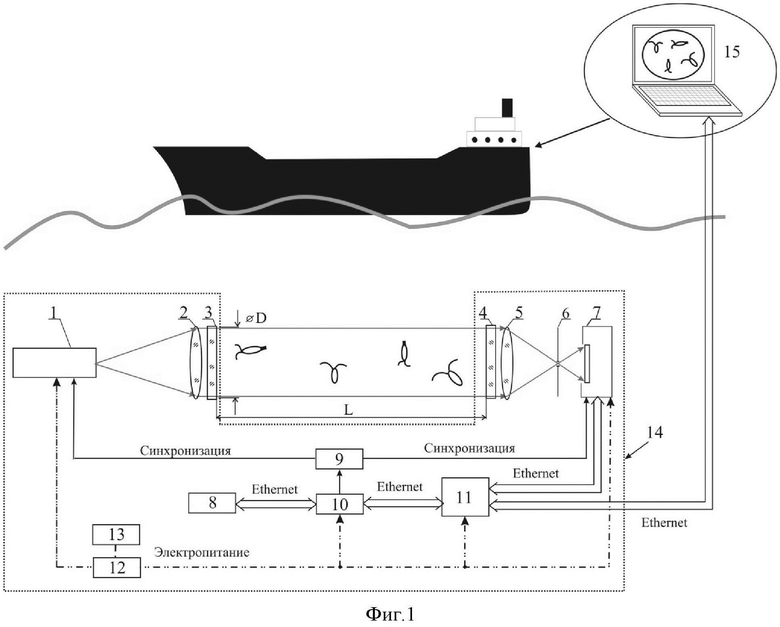
Способ регистрации планктона, включающий оптическое формирование изучаемого объема с взвешенными частицами путем фиксации этого объема импульсами когерентного оптического излучения и фотоэлектрическую регистрацию теневого изображения изучаемого объема с взвешенными частицами, отличающийся тем, что теневое изображение изучаемого объема с взвешенными частицами регистрируют как цифровую осевую голограмму Габора, при этом в течение одной экспозиции регистрируют голограммы нескольких изучаемых объемов, временную последовательность наложенных голограмм Габора формируют посредством управления длительностью и скважностью импульсного оптического излучения и продолжительностью фотоэлектрической экспозиции, изображение изучаемого объема с взвешенными частицами восстанавливают с голограммы послойно, путем обработки информации в каждом сечении методами численного расчета, а увеличения регистрируемого объёма достигают за счёт приёмной оптической системы, которая согласует поперечный размер изучаемого объёма и размер используемого приёмника оптического излучения.
| Victor V | |||
| Dyomin и др., Digital holographic video of plankton, Proc | |||
| of SPIE Vol | |||
| Автоматическое огнестрельное оружие | 1926 |
|
SU7073A1 |
| US 6876474 B2 05.04.2005 | |||
| WO 2015056864 A1 23.04.2015 | |||
| US 9007433 B2 14.04.2015. | |||

