1
Изобретение относится к преобразователям движения балансового осциллятора для электронномеханических приборов времени, преимущественно малогабаритных.
Известны преобразователи движения, содержащие ходовое колесо и взаимодействующую с ним одним концом анкерную вилку, плоскость которой параллельна плоскости катушки, расположенной в зазоре постоянных магйитов, укрепленных на балансовом осцилляторе. В этих преобразователях механическое взаимодействие осциллятора с анкерной вилкой вызывает тормозящее усилие в нем, приводящее к ухудшению изохронных характеристик осциллятора и уменыиению его добротности.
Предлагаемый преобразователь движения отличается тем, что на другом конце анкерной вилки перпендикулярно ей укреплен палец из магнитомягкого материала, Свободный конец которого размещен в отверстии катушки с возможностью радиального перемещения в пем. Это улучшает изохронные характеристики осциллятора и увеличивает его добротность.
Па фиг. 1 изображен предлагаемый преобразователь движения; на фиг. 2 - положение анкерпой вилки преобразователя при колебаниях балансового осциллятора.
С ходовым колесом 1 взаимодействует анкерная вилка 2, угол поворота которой ограничен штифтами 3. Па свободном конце вилки 2 перцендикулярно ее плоскости укреплен палец 4 из магнитомягкого материала. Палец
4 расположен в отверстии катушки 5, находящейся в зазоре между постоянными магнитами б, укрепленными на балансе. Катушка 5 включена в схему формирования импульса привода (не показано) так, что этот импульс передается осциллятору до прохождения им положения статического равновесия.
В исходном положении палец 4 всегда стремится занять одно из крайних положений, определяемых штифтами 3. При движении баланса протнв часовой стрелки (фиг. 2) палец 4 находится в крайнем левом положении. При поступлении в катушку 5 импульса тока возникающее в ней магнитное поле передвигает палец 4 к центру отверстия катушки. Когда
постоянные матниты 6 ироходят через положение статического равновесия осциллятора, палец 4 продолжает свое движение под действием их магнитного поля в ту же сторону до второго крайнего положения. Постоянные
магниты, достигнув амплитудного положения, движутся по часовой стрелке и при их приближении к положению статического равновесия процесс повторяется. Таким образом, преобразователь движения
практически не оказывает на осциллятор никакого влияния. Он работает, используя незначительное количество энергии, отбираемой у магнитоэлектрической системы привода, которая выполняет две функции: передачу энергии осциллятору и обеспечение работы преобразователя.
Предмет изобретения
Преобразователь движения балансового осциллятора, содержащий ходовое колесо и
взаимодействующую с ним одним концом анкерную вилку, плоскость которой параллельна плоскости катушки, расположенной в зазоре постоянных магнитов, укрепленных на балансевом осцилляторе, отличающийся тем, что, с целью улучшения изохронных характеристик и увеличения добротности осциллятора, на другом конце анкерной вилки перпендикулярно ей укреплен палец из магнитомягкого материала, свободный конец которого размещен в отверстии катущки с возможностью радиального перемещения в нем.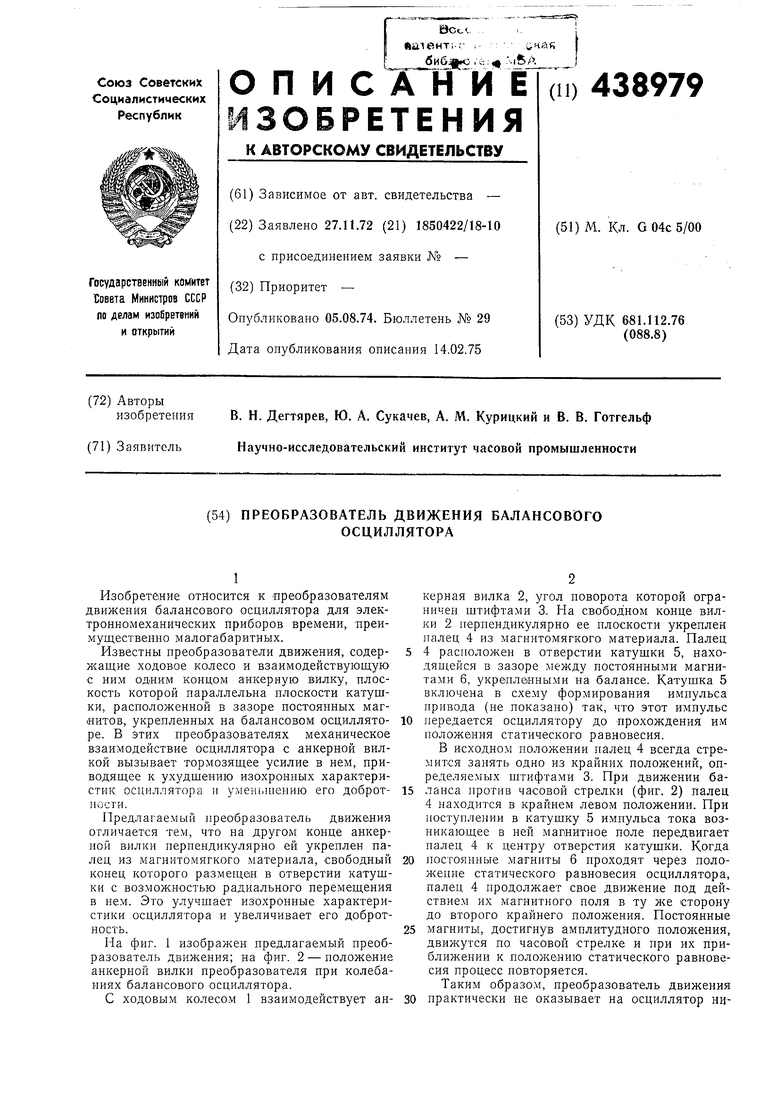
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь движения для балансовых приборов времени | 1980 |
|
SU900248A1 |
| Преобразователь движения балансового осциллятора электронно-механических часов | 1972 |
|
SU459755A1 |
| Преобразователь движения для электрических часов с балансовым осциллятором | 1972 |
|
SU438978A1 |
| СПУСКОВОЙ РЕГУЛЯТОР для МЕХАНИЧЕСКИХ ЧАСОВ | 1970 |
|
SU269009A1 |
| ПЛАТФОРМА СПУСКА ДЛЯ ЧАСОВ | 2012 |
|
RU2589637C2 |
| УСТРОЙСТВО ДЛЯ ПУСКА И ОСТАНОВА БАЛАНСОВОГО ОСЦИЛЛЯТОРА СЕКУНДОМЕРА | 1972 |
|
SU427312A1 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ СПУСКОВОЙ РЕГУЛЯТОР | 1970 |
|
SU272895A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКИХ ЧАСОВ С БАЛАНСОВЫМ ОСЦИЛЛЯТОРОМ | 1973 |
|
SU396665A1 |
| ЧАСОВОЙ МЕХАНИЗМ | 1971 |
|
SU320803A1 |
| Преобразователь движения для балансовых электронно-механических часов | 1973 |
|
SU479075A1 |
