1
Изобретение относится к геоэлектроразведке с использованием магнитотеллурических токов.
Известны устройства для регистрации вариаций компонент магнитного поля Земли, содержащее немагнитный корпус, систему карданных подвесов, подвижную платформу, магнитометры, датчик азимута, двигатель, источники питания, арретир. Однако невозможно осуществлять полную компенсацию постоянной составляющей напряженности поля по каждой измеряемой компоненте, а также автоматическую установку платформы с магнитометрами с необходимой точностью в исходное положение.
Достигается это тем, что в нем датчик азимута электрически связан с двигателем, установленным на платформе, а каждый магнитометр снабжен дополнительным двигателем, связанным через редуктор с комненсационным магнитом и блоком управления, выполненным в виде фотопреобразователя.
Это позволяет повысить точность и автоматизацию процесса измерений.
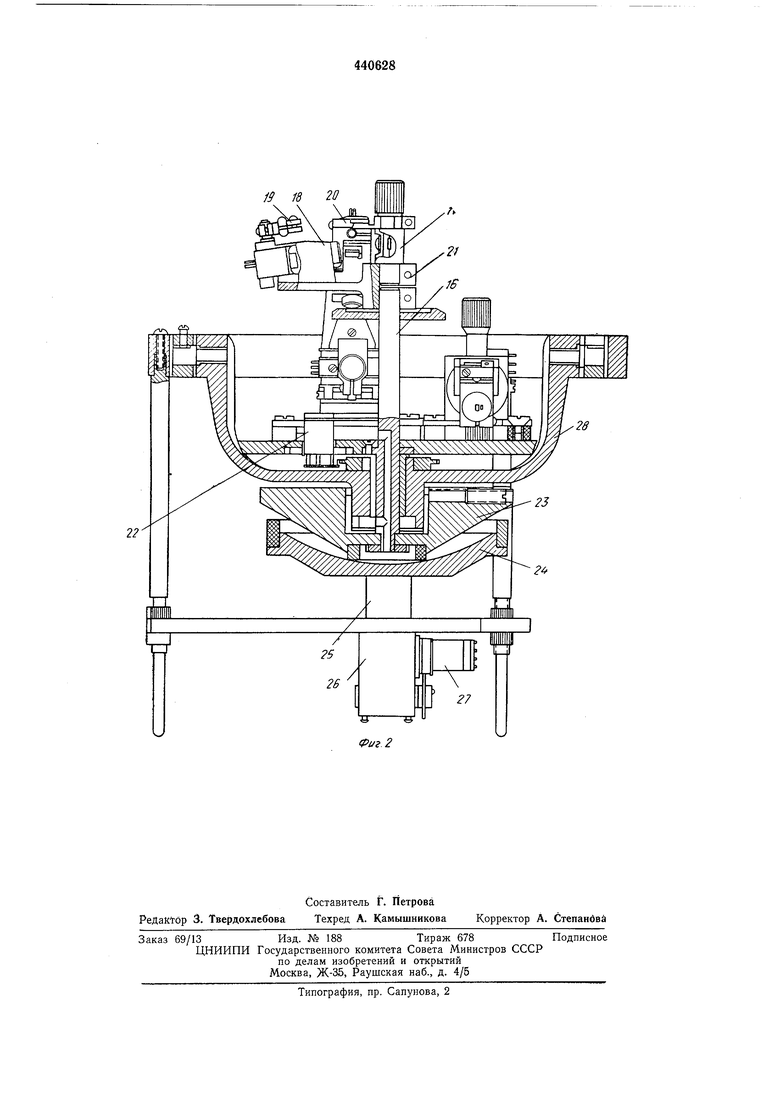
На фиг. 1 представлено предлагаемое устройство, вид сверху; на фиг. 2 - то же, вертикальный разрез.
Устройство состоит из внещнего кольца 1 карданного подвеса, второго кольца 2, оси 3, подвижной платформы 4, оси 5, магнитометров 6, измеряющих вариации напряженности горизонтальных компонент магнитного поля, магнитометра 7, измеряющего вариации вертикальной компоненты магнитного поля, корпуса 8 магнитометра, компенсационного магнита 9 с поворотным механизмом и двигателем, осветителя 10, зеркала 11, фотопреобразователя 12, щарового уровня 13, нивелировочных винтов 14, лимба 15, вертикальной
оси 16, чувствительного элемента 17 азимута, осветителя 18 датчика азимута, зеркала 19, фотопреобразователя 20, муфты 21, двигателя 22, балансного устройства 23, чащки 24, оси 25, подъемного механизма 26, двигателя
27 и скобы 28.
Внешнее кольцо 1 карданного подвеса жестко связано с корпусом магнитометра 8. Второе кольцо 2 через оси 3 соединено с первым и может поворачиваться вокруг этих осей.
Платформа 4 укреплена на оси 6. Ось 16 проходит через втулку, укрепленную на скобе 28. Скоба 28 через оси 3, 5 связана со вторым кольцом карданного подвеса и поворачиваться вокруг них, направление осей 3 и
5 - взаимно перпендикулярное. На платформе 4 установлены магнитометры, измеряющие вариации напряженности горизонтальных компонент 6 и вариации напряженности вертикальной компоненты 7. Каждый из магнитометров имеет магнитоустойчивый элемент
(датчик), помещенный в корпусе 8, на котором укреплен компенсационный магнит с поворотным устройством 9, осветитель 1U, зеркало 11 и фотопреобразователи 12. В верхней части корпуса установлен шаровой уровейь 13. Винтами 14 п 1рщадка с магнитометром нивелируется при сборке. На оси 16 помещен датчик азимута, который состоит из магниточувствительного элемента 17, осветителя 18, зеркала 19 и фотопреобразователя 20. Имеется возможность поворачивать датчик азимута вокруг оси. Выбранное положение датчика фиксируется муфтой 21. Азимуты измеряемых компонент определяются по лимбу 15. Платформа 4 может поворачиваться вокруг оси 16 на угол больше 36U двигателем 22. Ниже платформы установлено балансное устройство 23 так, что центр масс подвижной части находится на оси платформы ниже осей карданного подвеса. Арретирующее устройство состоит из чащки 24, оси 25, подъемного механизма 26 и двигателя 27.
В транспортном положении чашка арретирующего устройства прижата к балансному устройству, фиксируя платформу с датчиками. После установки на пункте наблюдения любым известным механизмом (часами, датчиком нажимного действия и т. п.) включается двигатель арретирующего устройства. При движении арретирующего устройства вниз чашка выходит из контакта с балансным устройством, и платформа с датчиками устапавливается в горизонтальной плоскости. В том случае, когда двигатель опускает чащку арретирующего устройства в нижнее положение, он выключается, а включается двигатель, с помощью которого производится установка азимута. Этот двигатель начинает поворачивать платформу с магнитными датчиками вокруг вертикальной оси. Угол поворота платформы ограничен, но больше 360°. При повороте платформы до крайпего положения направление вращения двигателя изменяется на противоположное (платформа также начинает вращаться в обратную сторону). Вращение платформы прекращается в тот момент, когда магниточувствительный элемент датчика азимута установится по магнитному меридиану. Таким образом, производится ориентация датчиков в заданный азимут.
После выключения двигателя, поворачивающего платформу, включаются двигатели поворотных устройств компенсационных магнитов. С помощью каждого из этих двигателей компенсационный магнит в каждом магнитометре устанавливается в такое положение, при котором его поле компенсирует постоянное внешнее поле, действуюпдее на датчик данного магнитометра.
В магнитометре используются два дифференциальных фотопреобразователя. С помощью одного фотопреобразователя измеряются вариации магнитного поля, а другой, дополнительный, управляет работой двигателя поворотного устройства компенсационного магнита. Положение датчика, осветителя и зеркала магнитометра выбрано таким, что фотопреобразователь освещается только тогда, когда датчик установлен в положение, 5 соответствующее измерению излучаемой компоненты (это положение датчика соответствует моменту компенсации постоянного внешнего поля). В этом случае сигнал на выходе фотопреобразователя отсутсгвует, и двигатель
0 поворотного устройства компенсационного магнита выключается.
Итак, платформа с магнитометрами установлена в горизонтальной плоскости, сориентирована но азимуту, и постоянное внещнее
5 поле скомпенсировано. Вследствие вариаций паиряженности магнитного поля на выходе магнитометров появляется сигнал, пропорциональный измеряемой компоненте магнитного поля. В том случае, когда внешнее магнитное
0 поле больщой амплитуды (магнитные бури и т. п.) изменяет освещенность фотопреооразователя выше определенного уровня, снова выключается двигатель, и производится повторная компенсация.
5 После окончания регистрации любым известным механизмом (часами, концом магнитной ленты и т. ц.) включается двигатель арретирующего устройства. Направление вращения двигателя в этом случае таково, что
0 чашка арретирующего устройства поднимается до контакта с балансным устройством. При арретировании платформы двигатель выключается. Принцип действия устройства не изменится, если используются магнитометры
5 другого типа, например, феррозонды и т. п. Компенсация постоянного внешнего магнитного поля может производиться и любым известным способом, например, магнитным полем, создаваемым током, протекающим по обмотке катущек или обмоткам колец Гельмгольца. Двигатель в этом случае перемещает реохорд потенциометра, включенного в цепь обмотки, изменяя тем самым ток, текущий через пее. В качестве двигателей можно использовать гидравлические или электрические двигатели определенных типов. Материалы, применяемые при изготовлении устройства, не должны иметь магнитных включений.
Предмет изобретения
Устройство для измерения вариаций компонент магнитного поля, содержащее корпус,
систему карданных подвесов, подвижную платформу, магнитометры, датчик азимута, источники питания, арретир, отличающееся тем, что, с целью повышения точности и автоматизации измерений, в нем датчик азимута электрически связан с двигателем, установленным на платформе, а каждый магнитометр снабжен дополнительным двигателем, связанным через редуктор с компенсационным магнитом и блоком управления, выполненным в виде фотопреобразователя,

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вариации напряженности геомагнитного поля | 1973 |
|
SU438951A1 |
| Магнитометр | 1981 |
|
SU949603A1 |
| ВНУТРИСКВАЖИННАЯ КАЛИБРОВКА ИНСТРУМЕНТА ПРИ ПРОВЕДЕНИИ ИЗЫСКАНИЙ ПЛАСТОВ | 2009 |
|
RU2673826C2 |
| ВНУТРИСКВАЖИННАЯ КАЛИБРОВКА ИНСТРУМЕНТА ПРИ ПРОВЕДЕНИИ ИЗЫСКАНИЙ ПЛАСТОВ | 2009 |
|
RU2525564C2 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО АРРЕТИРОВАНИЯ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2564636C1 |
| Электрический магнитометр | 1957 |
|
SU122808A3 |
| КОМПЕНСАЦИОННЫЙ ДИНАМОМЕТР | 1972 |
|
SU429295A1 |
| Магнитная вариационная станция | 1984 |
|
SU1325394A1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОЙ РЕГИСТРАЦИИ ВАРИАЦИЙ ПЯТИ СОСТАВЛЯЮЩИХ ЕСТЕСТВЕННОГО ЭЛЕКТРОМАГНИТНОГО ПОЛЯ ЗЕМЛИ | 1967 |
|
SU223947A1 |