Изобретение относится к области автоматики и предназначено для арретирования подвижной части радиолокационных антенн, установленных на борту подвижных объектов, и может быть использовано на летательных аппаратах, в том числе на самолетах и вертолетах.
Предлагаемое устройство предназначено для арретирования антенного устройства (антенны) бортовой радиолокационной станции (БРЛС), состоящего из неподвижной части, которая закреплена на корпусе подвижного объекта, и подвижной части, содержащей конструктивно соединенные антенное полотно и систему формирующих диаграмму направленности антенны высокочастотных излучателей, соединенных через фидерные линии, и вращающиеся переходы с неподвижной частью антенны. Подвижная часть антенны представляет собой двухосный или трехосный карданный подвес, состоящий в двухосном варианте из наружной рамы, поворачивающейся относительно корпуса объекта на угол азимута φАз (в горизонтальной плоскости), и внутренней рамы, поворачивающейся относительно наружной на угол места φУм (в вертикальной плоскости). На внутренней раме расположено антенное полотно с облучателями.
Известно арретирующее устройство трехстепенного гироскопа с карданным подвесом, содержащее корпус, привод арретира, цилиндрическую фрикционную муфту, установленную на оси наружной рамы с возможностью перемещения вдоль оси рамы, дисковую фрикционную полумуфту с упругой развязкой, связанную направляющими с корпусом, и дисковую фрикционную полумуфту, связанную с наружной рамой карданного подвеса при помощи штока с пружиной, который выполнен с фрикционной ступенью, установлен на оси наружной рамы и может перемещаться вдоль этой оси (а.с. СССР №934223, 1982).
Это устройство работает следующим образом.
Для арретирования приводят в движение привод арретира, усилием которого через упругую развязку и дисковые фрикционные полумуфты корпуса и рамы обеспечивается сцепление наружной рамы с корпусом. Одновременно движется шток вдоль оси наружной рамы и после сцепления его фрикционной ступени с фрикционной цилиндрической муфтой усилие упругой развязки в конце цикла арретирования создает фрикционный момент, сцепляющий внутреннюю и наружную рамы с корпусом. При разарретировании происходит возвращение полумуфт и штока в исходное состояние.
Недостатки этого устройства обусловлены тем, что наличие цилиндрической муфты, штока, направляющих и упругой развязки усложняет конструкцию и снижает надежность устройства. Кроме того, остается открытым вопрос обеспечения дистанционного управления приводом.
Указанные недостатки частично устранены в известном устройстве арретирования антенны для БРЛС типа FGM 129C-01A, приведенном в «Руководстве по технической эксплуатации БРЛС FGM129C, часть 2», изд. ОАО «Корпорация «Фазотрон-НИИР», Москва, 2011 г., раздел 112.14.03, стр. 6, 7, которое является ближайшим аналогом предлагаемого устройства и содержит: электродвигатели с постоянными магнитами, вращающими через редукторы антенное полотно, установленное на карданном подвесе, вокруг его осей, каждый из редукторов кинематически связан с тормозной электромагнитной муфтой, и блок управления двигателями. Обмотки тормозных электромагнитных муфт и вход электропитания блока управления двигателями подключены к внешнему источнику электропитания - бортовой сети летательного аппарата.
Электромагнитная тормозная муфта представляет собой конструктивно объединенные катушку электромагнита (обмотку) с подвижным подпружининным сердечником, на котором размещен неподвижный фрикционный диск, расположенный напротив подвижного фрикционного диска, вал вращения которого соединен с валом механического редуктора.
Работа такого устройства происходит следующим образом.
При отсутствии электропитания неподвижный фрикционный диск с помощью пружины прижимается к подвижному диску, что обеспечивает торможение привода. При включении электропитания антенны электромагнит муфты втягивает сердечник, преодолевая сопротивление пружины, и отводит неподвижный фрикционный диск от подвижного, освобождая вал редуктора для свободного вращения полотна антенны.
Однако рассмотренное устройство арретирования обладает существенным недостатком, обусловленным необходимостью увеличения массы антенны в целом из-за применения громоздких конструктивных элементов антенны - электромагнитных фрикционных муфт, в том числе из-за увеличения массы подвижной части антенны, так как требуется установка муфт на подвижной части, что приводит к ухудшению динамических характеристик приводов антенны при обзоре пространства.
Задачей предлагаемого технического решения является устранение этого недостатка за счет того, что устройство электромагнитного арретирования антенны, содержащее электродвигатели с постоянными магнитами, вращающими вокруг осей карданного подвеса через редукторы антенное полотно, установленное на карданном подвесе, и блок управления электродвигателями, снабжено для каждой из осей подвеса коммутатором и шунтом, управляющие входы коммутаторов параллельно подключены к цепи электропитания приводов антенного устройства, обмотки каждого электродвигателя подключены к коммутируемому входу своего коммутатора, а нормально замкнутый и нормально разомкнутый выходы этого коммутатора соединены соответственно со своим шунтом и своим выходом блока управления электродвигателями.
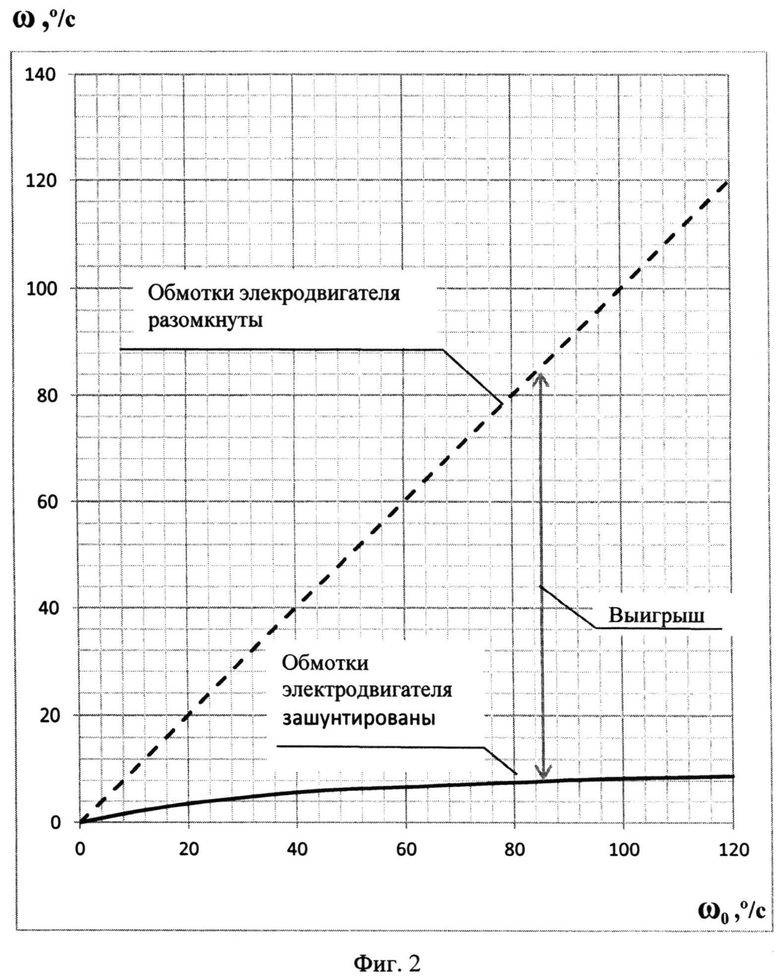
На фиг.1 представлена функционально-кинематическая схема предлагаемого устройства электромагнитного арретирования антенны в двухосном варианте карданного подвеса, на фиг.2 - результаты экспериментальной проверки влияния шунтирования обмотки электродвигателя на угловую скорость самопроизвольного движения антенного полотна под действием внешней силы.
Устройство электромагнитного арретирования антенны (фиг.1) содержит первый электродвигатель 1 и второй электродвигатель 2, которые через редукторы 3 и 4 соответственно вращают антенное полотно 5, установленное на карданном подвесе 6, вокруг осей в азимутальном и в угломестном направлениях, и блок управления двигателями 7, вход 7-1 которого подключен к внешнему источнику электропитания. Устройство электромагнитного арретирования антенны снабжено двумя коммутаторами 8, 9 и двумя шунтами 10, 11, управляющие входы первого 8-1 и второго 9-1 коммутаторов подключены к цепи электропитания антенного устройства, обмотки первого электродвигателя 1 подключены к коммутируемому входу 8-2 первого коммутатора 8, соответствующие нормально замкнутый 8-3 и нормально разомкнутый 8-4 выходы первого коммутатора 8 соединены соответственно с первым шунтом 10 и первым выходом 7-2 блока управления двигателями 7. Обмотки второго электродвигателя 2 подключены к коммутируемому входу 9-2 второго коммутатора 9, соответствующие ему нормально замкнутый 9-3 и нормально разомкнутый 9-4 выходы второго коммутатора соединены соответственно со вторым шунтом 11 и вторым выходом 7-3 блока управления двигателями 7.
На неподвижной части антенны установлена внешняя вращающаяся по азимуту в пределах угла φАз рама карданного подвеса 6, электродвигатель 1 с редуктором 3, блок управления 7, первый коммутатор 8 и шунт 10. Подвижная часть антенны содержит карданный подвес 6 в целом с установленными на внутренней раме подвеса антенным полотном 5, электродвигателем 2 и редуктором 4, что обеспечивает поворот антенного полотна по углу места в пределах φУм.
Блок управления двигателями 7 представляет собой цифроаналоговый преобразователь, формирующий электрические сигналы управления электродвигателями 1 и 2.
Коммутаторы 8, 9 аналогичны друг другу. Коммутатор представляют собой, например, электромагнитное коммутирующее реле с группой контактов, каждая из которых при подаче электропитания на обмотку реле (при включении реле) производит переключение цепи подвижного контакта с цепи нормально замкнутого контакта на цепь нормально разомкнутого контакта. В обесточенном состоянии обмотки реле цепь подвижного контакта снова подключается к нормально замкнутым контактам.
Шунты 10, 11 аналогичны друг другу и представляют собой проводники с сопротивлением, существенно меньшим, чем внутреннее сопротивление обмоток электродвигателей.
Предлагаемое устройство электромагнитного арретирования антенны работает следующим образом.
При подаче на антенну электропитания срабатывают коммутаторы 8, 9 и через вход 8-2 и выход 8-4 коммутатора 8 и вход 9-2 и выход 9-4 коммутатора 9 производят подключение обмоток первого электродвигателя 1 и второго электродвигателя 2 к первому (азимутальному) 7-2 и соответственно ко второму (угломестному) 7-3 выходам блока управления двигателями 7. После включения электропитания блок управления двигателями 7 формирует сигналы для электродвигателей 1 и 2, действие которых устанавливает антенное полотно 5 в исходное положение и удерживает его при воздействии на подвижную часть антенны внешних отклоняющих силовых моментов. В дальнейшем блок управления 7 управляет пространственной ориентацией антенного полотна 5 в соответствии с заданными режимами работы бортовой РЛС, используя данные канала информационного обмена с центральным вычислительно-управляющим устройством БРЛС (на фиг.1 не показан).
При отключении внешнего электропитания коммутатор 8 возвращается в выключенное (нормальное) состояние, при котором обмотки азимутального электродвигателя 1 через вход 8-2 и выход 8-3 подключаются к шунту 10. Аналогично этому коммутатор 9 через вход 9-2 и выход 9-3 подключает обмотки электродвигателя 2 к шунту 11.
Отключение электродвигателей 1 и 2 от блока управления 7 приводит к исчезновению удерживающих вращающих моментов на валах электродвигателей, что при действии внешних сил на антенное полотно 1 и подвижную часть антенны в целом приводит к повороту подвеса и через редукторы 3 и 4 и вызывает вращение осей электродвигателей.
Известно, см., например, Н.И. Кошкин и М.Г. Ширкевич. Справочник по элементарной физике. Москва, изд. «Наука», 1976, стр.157, 158, что изменяющийся электромагнитный поток в двигателе постоянного тока с постоянными магнитами возбуждает электрическое поле (вихревое электрическое поле). В обмотках электродвигателя наведенное поле проявляется как действие сторонних сил, приводящее к возникновению электродвижущей силы (ЭДС) электромагнитной индукции. При соединении выводов обмотки между собой (шунтировании обмотки) появляется индукционный электрический ток, обусловленный этой ЭДС.
Индукционный ток имеет такое направление, что его магнитное поле в соответствии с законом Ленца препятствует изменениям того магнитного поля, которое вызвало появление индукционного тока. Значение ЭДС индукции Б равно по абсолютной величине скорости изменения магнитного потока, т.е. отношению приращения магнитного потока ΔФ за время Δt, через суммарную площадь, ограниченную контурами всех витков обмотки электродвигателя, а знаки ε и скорости изменения магнитного потока противоположны, т.е.
где i - текущий номер витка обмотки электродвигателя,
n - общее число витков обмотки,
ΔФi - величина изменения магнитного потока через i-й виток,
Δt - интервал времени, на котором произошло изменение величины ΔФi.
Если замкнуть обмотку электродвигателя, то в ней возникает электрический ток, величина которого I равна
I=ε/R,
где R - общее сопротивление цепи короткозамкнутой обмотки.
При этом возникает тормозящий момент, препятствующий вращению электродвигателя и связанной с ним редуктором подвижной части антенны, что и обеспечивает эффект арретирования антенны при выключении электропитания. Сила торможения будет прямо пропорциональна внешнему крутящему моменту и обратно пропорциональна сопротивлению короткозамкнутой цепи обмотки электродвигателя.
Таким образом, достигается цель предлагаемого технического решения - арретирование полотна антенны без увеличения массы подвижной части карданного подвеса.
Это обстоятельство было экспериментально проверено на антенном устройстве БРЛС, предназначенном для установки на борту летательного аппарата (ЛА), которое в качестве антенного полотна имеет зеркало, конструктивно объединенное с контррефлектором и рупорными облучателями, формирующими необходимую диаграмму направленности и соединенными через вращающиеся высокочастотные переходы с неподвижной частью антенны. Поворот зеркала по азимуту и углу места производит электромеханическая часть антенны, которая конструктивно состоит из основания, карданного подвеса и высокочастотной части.
Электромеханическая часть антенны представляет собой двухосный карданный подвес, состоящий из наружной рамы, поворачивающейся относительно корпуса ЛА на угол азимута, и внутренней рамы, поворачивающейся относительно наружной рамы на угол места. На внутренней раме размещено антенное зеркало с облучателями и контррефлектором. Поворот зеркала производят азимутальный и угломестный электроприводы, каждый из которых содержит моментный безколлекторный электродвигатель постоянного тока типа ДБМ 70-0,16-3-2, редуктор и датчики угла. Этот двигатель имеет две независимые группы обмоток, управляющие напряжения на которых создаются блоком управления электродвигателями при включении электропитания антенны.
Для проведения эксперимента был использован угломестный канал электропривода, который позволял варьировать дисбаланс зеркала, располагая дополнительный груз на зеркале антенны. Редуктор этого канала имел передаточное число, равное 55. В качестве коммутатора использовалось электромагнитные реле типа РЭС48Б, которое располагалось в непосредственной близости от электродвигателя. Реле имеет две группы контактов, через которые производилась коммутация цепей обмоток между выходом блока управления электродвигателями и шунтом. Обмотка реле была подключена параллельно входной цепи электропитания антенны. Масса реле существенно меньше, чем масса электромагнитной тормозной муфты ближайшего аналога.
Методика испытаний состояла в измерении средней угловой скорости движения зеркала в вертикальной плоскости под действием дисбаланса при разомкнутой обмотке электродвигателя и при коротком замыкании (шунтировании) его обмотки с последующим сравнением этих скоростей для одинаковых значений дисбаланса антенны.
Результаты этих испытаний приведены на фиг.2, где дана зависимость угловой скорости движения зеркала при шунтированной обмотке электродвигателя ω от скорости зеркала при разомкнутой обмотке ω0. Полученные результаты показали десятикратное снижение угловой скорости вращения карданного подвеса при его непроизвольном вращении из-за дисбаланса за счет тормозящего эффекта, возникающего в случае шунтирования обмоток электродвигателей привода. Например, если исходная скорость ω0=50°/c, то она падает до скорости ω=5°/с, что показывает хорошие арретирующие свойства антенны. При этом еще более снижается кинетическая энергия вращающегося подвеса EК, равная
EК=0,5Jω2,
где J - момент инерции карданного подвеса относительно оси вращения, что практически исключает возможность поломки антенны при соприкосновении подвижной части антенны с торцевыми ограничителями, т.к. сила соударения уменьшается в сто раз по сравнению с исходным значением.
Таким образом, полученные результаты подтверждают, что предлагаемое техническое решение обладает существенным положительным эффектом и обеспечивает достижение поставленной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| Устройство арретирования гировертикали | 1980 |
|
SU843520A1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| ХОДОВАЯ ЧАСТЬ БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2243107C1 |
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2094250C1 |
| Устройство для управления коробкой передач с плавным регулированием скорости вращения и механизмом подачи топлива транспортного средства | 1984 |
|
SU1286446A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
Изобретение относится к области автоматики и предназначено для арретирования подвижной части антенн бортовых радиолокационных станций (БРЛС), размещаемых на подвижных объектах. Технический результат - устранение угрозы выхода из строя антенны из-за ударов ее подвижной части об ограничители при маневрировании объекта, поскольку обеспечивается торможение подвижной части антенны путем шунтирования обмоток электродвигателей при отключении электропитания. Для этого устройство электромагнитного арретирования антенны БРЛС содержит бесконтактные моментные электродвигатели, связанные через редукторы с осями карданного подвеса, на внутренней раме которого установлено антенное полотно, блок управления электродвигателями, бортовой источник электропитания, и снабжено коммутаторами, подключенными к бортовому источнику электропитания, и шунтами, которые подключены через нормально замкнутые контакты коммутаторов к обмоткам электродвигателей, при этом блок управления подключен к обмоткам электродвигателей через нормально разомкнутые контакты коммутаторов. 2 ил.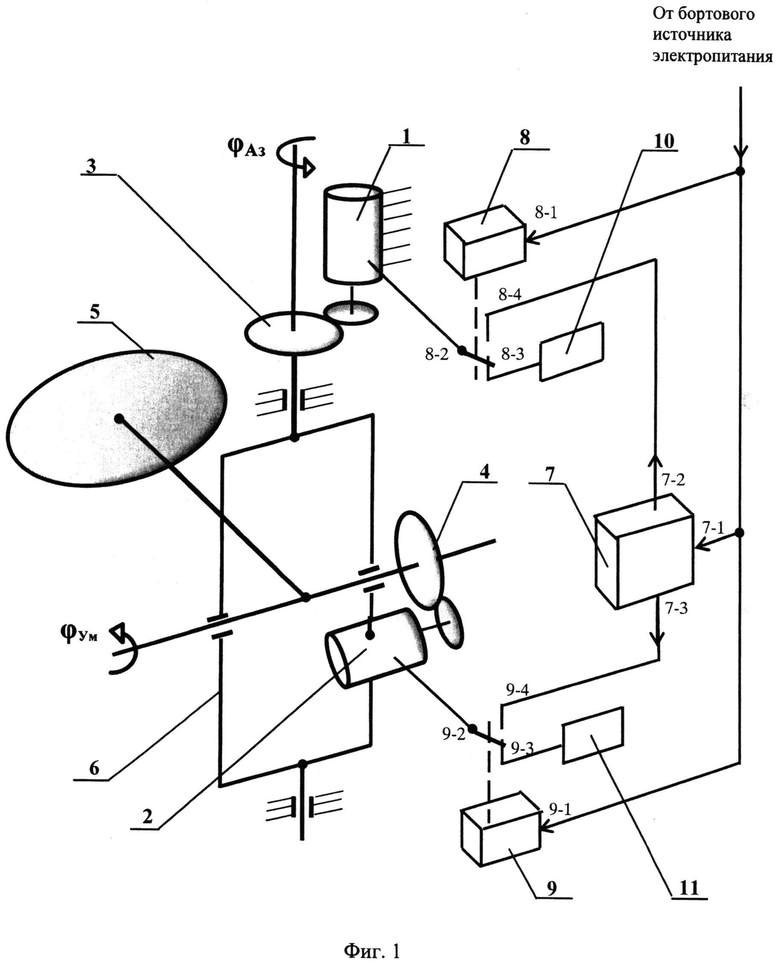
Устройство электромагнитного арретирования антенны бортовой радиолокационной станции, содержащее бесконтактные моментные электродвигатели, связанные через редукторы с осями карданного подвеса, на внутренней раме которого установлено антенное полотно, блок управления электродвигателями и бортовой источник электропитания, отличающееся тем, что оно снабжено коммутаторами, подключенными к бортовому источнику электропитания, и шунтами, которые подключены через нормально замкнутые контакты коммутаторов к обмоткам электродвигателей, при этом блок управления подключен к обмоткам электродвигателей через нормально разомкнутые контакты коммутаторов.
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| Способ крашения мехов | 1939 |
|
SU56653A1 |
| Привод наведения рефлектора | 1990 |
|
SU1764109A1 |
| Устройство для выдачи комплектов плоских изделий | 1987 |
|
SU1601051A1 |
| СПОСОБ ПРОИЗВОДСТВА ИНСТАНТ-ПОРОШКА ДЛЯ ПРОИЗВОДСТВА СКОРЦОНЕРНО-МАНДАРИНОВОГО НАПИТКА | 2009 |
|
RU2416229C1 |

