1
Известен способ автоматичес- кого управления мощностью и возбувдением турбогенератора электростанции преимущественно в послеаварийном режиме энергосистемы пу тем изменения открытия регулирующих клапанов турбины и форсирования возбуждения по сигналам системы управления. Выявление аварийной ситуации в таких системах осуществляется за C4QT внешней информации о состоянии энергосистемы и возмущениях, передаваемых на станцию по каналам связи. По полученной системой информации подключается одна из заранее подготовленных прогрш ш
§ормирования команды управления, ффективность такого способа определяется надежностью получения и передачи информации об аварийной ситуации и полнотой охвата возможных аварий при подготовке программ Предлагаемый способ обеспечивает более эффективное поддержалие огойчивой работы турбогенератора,
, то достигается тем, что интегри1руют изменение частоты вращения ва ла, умножают величину полученного интеграла на предельно возможное значение мощности, передаваемой s энергосистемуг формируют первый сигнал управления, пропорциональный разности полученного произведения и текущего приращения мощности турбогенератора, и второй сигнал управления, пропорциональный положительной величине указанного интеграла при положительном значении первого сигнала, выделяют максимальное значение из этих двух сигналов и по этому значению вместе с самими сигналами изменяют открытие клапанов и форсируют возбуждение, если при возникновении положительного значения первого сигнала текущее приращение мощности положительно.
Для уменьшения погрещности формирования сигналов управления при изменении величины местной нагрзгзкж и величины напряжения на щинах электростанции предельно возможное зна|Чение мощности, передаваемой в энергосистему, определяют по отнесенной к ограниченному по минимуму относительному напряжению разности между теку1цим значением мощности турбогенератора и сигналам, эквивалентным местной нагрузке, величину которого задают заранее и корректируют сигналом, обеспечивающим полную компенса1дао отличия текущего приращения мощности, отнесенного к предельно возможному значению мощности, передаваемой в энергосистему, от линейной функции интеграла изменения частоты вращения, начиная с момента достлжения первым сигналом заданной величины.
Второй сигнал управления компенсируют сигналом, полученным от интегрирования его изменения с более высоким быстродействием для сигналов в сторону сброса нагрузки, чем для сигналов в сторону наброса нагрузки, что позволяет уменьшить влияние колебаний частоты Бра1цершя в переходном процессе.
Способ может быть реализован системой, индивидуальной для каждого турбогенератора электростанции или группы генераторов, работающих на общие шины. Для формирования команды управления системой используют информш1дю о частоте вращения вала одного агрегата и о суммарной мощности группы генераторов.
Способ управления основан на известных приближенных соотношениях, связывающих мощностью Р„ генератора и угол S связи генератора с эквивалентным центром энергосистемы и частоту О) вращения вала с углом S :
РГ Д51п5 +8 ,
L
д6-с ла)й, (cosS-uS;
где А,В,С - кошшексы, определяемые условияг.ш работы генератора в энергосистеме.
Если наблюдаеглые в работе изменения d Р,- и uS могут быть измерены, то эти соотношения позволяют фoprvlиpoвaть команду управления и оценить необходимость разгрузки при возникновении аварийной ситуации.
При неизменном напряжении на шинах станции и постоянном значении В, эквивалентном местной нагрузке, предельно возможное значение передаваемой в энергосистему мощности может быть определено как tai РЕ - S A5i, , где о заданная величина максимально допустимого угла 8 .
Изменение мощности генератора при 5 определяют по формуле
,
AP-PrtOKC -Г-Гр S
5Sinbg
cog So s
r ™«-ll .,
При , a при S §0 1 0 0 и определяет необходимость осуществления разгрузки. При этом сигнал Х про
5 порционален возникшему несоответствию мощностей и может быть использован для непосредственного управления,
В связи с тем, что сигнал Xi
0 определяется приращениями л В и 4 Р и зависит от скорости изменения координат РГ и W , дош обеспечения устойчивого контроля изменения в медленных процессах,
5 кроме XT, может быть использован сигнал
,
определяющий изменение эквивалентного yvjia иьязи от момента, определяемого по одновременному возникновению неравенств
.
Если с возрастанием частоты U) увеличивается частота приемной части системы, то сигнал Х- оказывается малым, что и определяет целесообразность использования его совместно с сигналом X
Увеличение напряжения U на шинах станции кратковременно и вызываемое этим изменение комплекса А не учитывается при формировании сигнала управления. Сигнал В, эквивалентный местной нагрузке, может изменяться в широких пределах,
5(1 а непосредственно измерить его невозможно. Для определе1шя необходимо использовать интегральную схему компенсации ошибки выбора В и компенсацию влияния напряжения и на изменение А, Так как для б,
у р /cosSi cosSN о XI-PDOKC (.„5 SM)
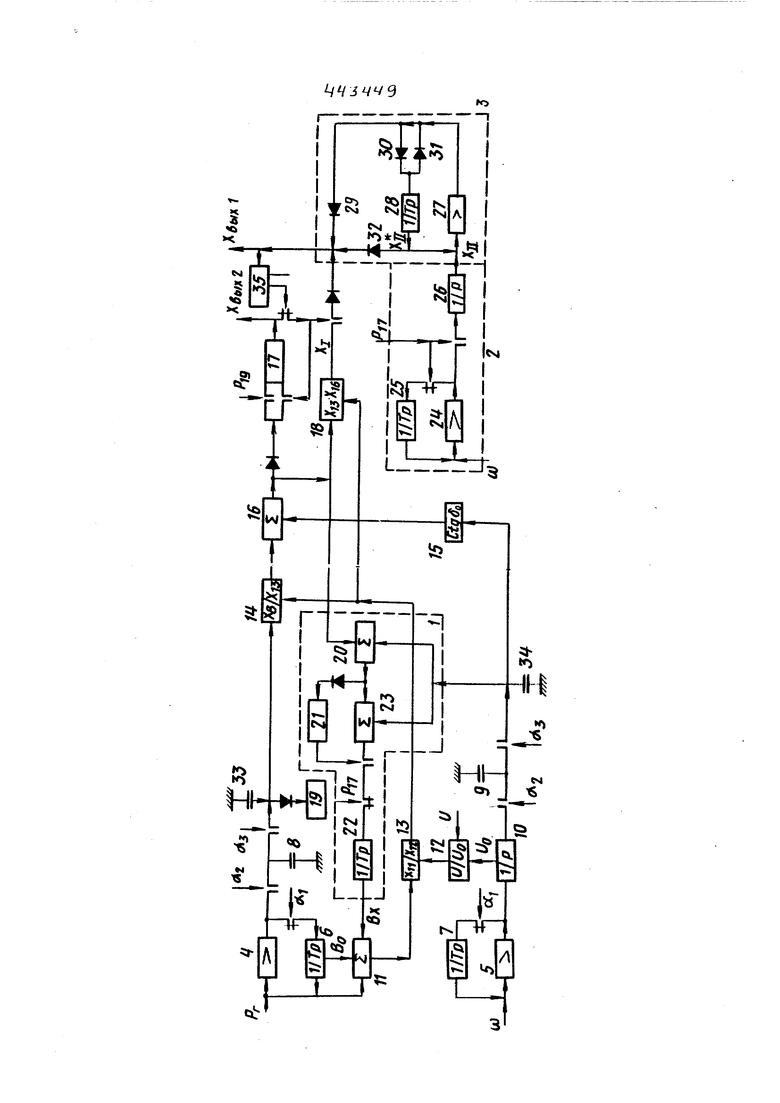
ТО при малом -(ctq 5 l т.е. X не зависит от А и В и является линейной функцией лЬ . Это позволяет внести коррекцию В путем устранения несоответствия и линейной функцией ли , т.е. путем полной компенса ции разности --(ctqS -ctgSnUS -w g г- / w где РООКС определяется как. И В - постоянная времени и оператор диффе ренцирования), В связи с тем, что на втором сигнале Хд сказываются колебания скорости вращения вала, предлагается замещать его сигналом Х// от интегратора путем полной компенсации разности Хя - Хд . При этом для стабилизации процесса замещения интегратор выполнен с малой постоянно времени на компенсацию сигналов снижения мощности и большой постоян ной времени на компенсацЕШ сигналов повышения мощности Для исключения перерегулирования и нарушений работы элементов системы выходная команда Xgwxi упра вления системой может определяться максимальной величиной сигналов Х/ и Хд и сигнала Х/г на выходе интегратора, что не исключает использования каждого сигнала в отдельности. Способ может быть реализован различными структурными схемами,которые, в свою очередь, могут иметь свои аппаратурные решения. Так, например, только выражение для сигнала Х/ при сохранении его функциональных особенностей может быть представлено в различных вариантах, каждый из которых имеет свою структурную схему РГ -б . , uS-лР (VM Sin Of) ,..lU lPr-B I f OS 0 ° (VJ J/nfri (VfUo) L Sin Sn CQS 5o 4 P Г Pr-6 .(UIDoY Sin So число которых определяется возмояными сочетаниями величин при осуще ствлении преобразования На чертеже приведена одна из возможных структурных схем, реадизуБэщих предлагаемый способ, для случая V I t flU frS . (uo) Wo7 у A -m-AS. Система состоит из схемы формирования первого сигнала Хт (на чертеже не выделена), схемы I фор мирования значения В, схем 2 и 3 формирования и компенсации второго сигнаяа8 соответственно. Для Армирования сигнала Хт используются непрерывные сигналы; пропорциональные мощности РГ генератора,напряжению V на шинах станции и час тоте ш вращения вала турбогенератора. Текущие приращения мощности РГ и частоты AU) вращения вала определдатся значениями сигналов на выходе усилителей 4 и 5, охваченных быстродействующими интеграторами 6 и 7, Интеграторы отключаются на входе на зацанное время, определяемое частотой шшульсовск , Сигналы ot - ou форр.шруются генератором стабилизированных шлпульсных сигналов, обеспеч шшощЕм необходимый фазовый сдвиг мелду нтш. Усилитель 4 сигналом oL2 кратковременно подключается к запоьщнающему устройству, выполненному в виде емкости 8, которая по сигналу а , присоединяется на заданное время к последующей части схемы, Аналогично комугутируется запоглинающее устройство в цепи ш с емкостью 9, на входе которого включен быстродейству ощий интегратор 10, обеспечивающий получение сигнала текущего приращения интеграла изменения частоты, пропорщонального изменению угла лУ связи генератора. Сигнал, равный текущему значению мощности генератора, с выхода интегратора б поступает на сушматор II, осуществляющий преобразиванА е РГ - Ьо - Вх , где Вх - сигнал от схемы I, BO - задаваемая величина, уменьшающая значение сигнала Вх , что облегчает работу системы, в частности схемы I, Сигнал, пропорциональный напрягкеншо , на элементе 12 сравнивается с минимальной уставкой по напряч ению UOH в форме при и Vo или I.-J2 I при поступает в преобразователь 13, Преобразо4ватель13 осуществляет операцию XT о -fi и передает сигнал (разоштелю 14. оруществляюще лу опе1радию Xj4 , . . Сигналы Хти и Хт| бвГх9 /&о-л8 (от элемема 15) сравниваются на сутдалаторе 16. Сигнал через контакты реле 17 и диодный элемент логической схемы выделения максшлачьного сигнала управления после угшожения на Хто в преобразователе 18 поступает на выход систегш . В результате на выходе преобразователя 18 получают первый сигнал управления в ви dgEo л г - Реле 17 срабатывает только при положительных сигналах Хтл, если при этом изменение мощности Хо лР положительно. Это йиксируется реле 19, нормально разомкнутые контакты которого Б1сл10чены в цепь реле 17 и зашунтированы контактами этого же реле, что искшочает его отпа,цание после срабатывания если исчезает сигнал Xg , т.е. л Р оказывается 0. Б результате сохраняется состояние срабатывания по однократному сигналу. Сигнал X tfi с выхода элемента 16 поступает на сумматор 20, который осуществляет замещение постоянной ctgSo на ftgS по соотношению 20 %6 -iiii)So-ctgS)AS-cig i&S-ff „UfUo в результате задания oi устанашшвается момент коррекции В при угле . При возникновении Хпп О реле ный элемент 21 включает в работу и тегратор 22, на вход которого поступает сигнал с сумматора 20 посл преобразования в элементе 23 --X2o(.tgt)) Благодаря высокому быстродействию всех элементов схемы стабили защш процесса комнвнсации несоответствия достигается неболышш уве личением исходной постоянной време ни интегратора 22, При срабатывании реле J.7 () компенсация несоответствия временно прекращается за счет отсо единения входа интегратора контактами реле 17, При срабатывании реле 17 по е сигналу прекращается колшенсащя --.-JTГ)4 сигнала на выходе усилителя 24,осу ествляемая интегратором 25, Подклюаемый при этом к выходу усш1йте;ш нтегратор 26 обеспечивает формироание второго сигнала управления н,- пропорционального положительому значению интеграла изменешя скорости вращения вала, который по-ступает на усилитель 27, охваченный интегратором 28. а затем через диодный элемент 29 логической выделения максимального сигнала в цепь , Для обеспечения малого значения постоя11ной интегратора 28 при кo шeнcaIщи сигналов Хо О и увеличения ее при компенсации А Хрг, О ВХОД интегратора подключен через диоды 30 и 31, обеспечивающие выделение знака сигнала д Хог, и соответствующие характеристике интегратора. Сигнал после интегратора 28 через диод 32 поступает также в цепь управления Xgwx- . На выходе импульсной части системы могут быть установлены инерционные элемвнты-4)ильтры, выполненные в виде емкостей 33 и 34, Отключение реле 17 осу1цествляется при помощи реле 35, кратковременно разрывающего шунтирующую цепь реле 17 при исчезновении сигнала X/5WJrr Основным возмущением, приводящим к срабатыванию систелш, можег быть диитаточно медленное падение напря 1:ения в, приемной системе, сопровоадаемое произвольным изменением местной нагрузгш, т.е. изменяемые величины, определяющие работу генератора, не могут быть определены непосредственно на станции. При-этом имеются постоянные малые изменения F-, и & , которые в отдельные моменты могут и не совпадать по знаку с основным возму1це-нием, приводящим к снижению допустимой загрузки линий электропередач и постепенноглу увеличению угла S. В начальный момент, когда угол , AP j-fgCtgS-a и (ftgSo ctgS) , ЧТО определяет отсутствие сигнала на выходе системы из-за отсутствия сигнала на входе реле 17. При этом сигнал на выходе сумматора 20 будет также отрицательным, Хрл (ctgS -ctgS)A, и схема х будет выключена из работы. При сигнал на выходе Системы отсутствует, но схема I включается благодаря Хрл О и срабатыванию реле 21. В результате интегратор своим .., жллл . Vpi t XL fr .«« wX7v/lrJlVl л:)Л ходным сигналом В изменяет разяостъ P - BO- BX - до тех пор, пока на его входе сигнал не станет равным нулю. Так как на вход интегратора 22 подается сигнал ( то Xg О определяем & р-бр-Вд cig l AcosSi, д8 т.е. значение произвольной в точке г-Уг При 0 (в общем случав 8о может быть S2 ) сигнал на выходе системы 0 Срабатывание реле 17 (д Р 0) приводит к подключению сигнала Xj Xrg к ILgbi Одновременно прекращается компенсация интеграторами 22 и 25. В результате возникает сигнал Xii О, который сразу же начинает замещаться сигналом Xj. В невозм ш енном состоянии, когда л5 лSMUH , т.е. меньше порога чувствительности системы, XT О и система отключена. Обычно при работе генератораЦ о,#о , что делает этот режим маловероятным. При возникновении угрозы нарушения устошивости, когдал5 О, а д Р О, на выходе возникает форсированный сигнал л8 0ийРэЬ О система фиксирует мгновенное значение л Р и 4 с частотой опроса, определяемой частотой изменения сигналов о1 J (которая определяется погрешностями аппаратуры и при ее малой величине мой:ет составлять 20-500 Гц). При работе обеспечивается следующий порядок черезования сигналов Л1 : при ,fO d.0; при t при Ai 0 0(2 0 . ;сли XT оказывается больше О ( jAi6 о ) И при ЭТОМ л Р о, система вступает в работу, обеспечивая Шлплитуду XT, пропорциональную скорости изменения ли . В этом случав появление сигнала Хи обеспечивает контроль состояния энергосистемы, даже если в следующий момент д Р «с 0. По сигналу Хвьм осуществляется пропорциональное управление мощностью и возбуадением, а сигнал XgbMo может использоваться для кратковременной форсировки и запуска синхронизатора турбины в сторону меньше с целью замещения игнала Xgwx т и отюшчения систамы. табилизация процесса при БОЗЛЙКНОвении колебаний мощности осуществляется за счет утленьшения шлплитуды сигнала Хл при замеЕ1ении его сигналом интегратора Х// , Возмущения типа короткого замыкания, приводящие к рез кому утла яь шениюдР и увеличению л и , обуслав ливают вознирсновенйв сигналов . X8feU2 и с запаздыванием г оп« ределяемытл тем, что для первого момента и Р 0. При отюпочении линии электропередачи система работает аналогично, т.е. она не peaгирует непосредственно на диналшчесюте Боз& уп1ения. Возмущения типа включения линии электропередачи, сопрОБОждаб мыэ увеличением д Р и уг юньшенкем й , не приводят к срабатыванию системы, так как Хт/. и Хто 0. Возмуи ения, внзванннв откшси чением местной нагрузки, сопровождаетлые набросом мощности на лкнию электропередачи, приводят к возрастанирэ сигнала Хт и срабатыванию cиcтe ш. Возмущения, вызванные резшш увеличением местной нагрузки, не приводят к срабатываншо систег.ш так как д Р 0. Конструктивкое исполнение элементов систеьщ, реализующей способ, может быть ПрОИЗБОЛЬНЫМ Для получения текущего изменения л Р и лш , кроме схеьш с усшштелягйи 4 и 5, охваченными обратной связью (интеграторакш 6 и 7Х могут быть использованы усилители скоьшонованные с запоминающим усТ ройстБом и краткоБрешьнао под1шо-° чавмые к входным цепям, сигнаяшж ai . Запоминающие устроГютва 8 и 9 могут быть выполнены и в виде усилителей, В качестве запокшнающего устройства иногда используют входные усилители 4 и 5, что упрощает схему. .Для повышения точности cyfviMHрование сигналов 16, 23 и других может осуществляться как на статИ-ческих усилителях или пассивных элементов, так и путем модулирования несущей частоты сигналами,подлежащими суммированию (при высокой частоте опроса). Когл1 1утирующие элементы могут быть выполнзЕШ в бесконтактном исполнении по известршм схвмш1, а первмножители сигналов - как на нелинейных элементах, так я на линейных преобразователях.
ИЗОБР ТЕШШ
I, Способ автоматического управления МОБЩОСТЫО и возбуждением турбогенератора электростанции преимущественно в послеаварийных
режимах энергосистемы путем изменения откротия регулирующих клапанов турбины и форсирования возбуждения по сигналам системы управления, отличающийся тем, что, с целью более эсгфективного поддержания устойчивой работы турбохенератора, интегрируют изменение частоты вращения вала, умножают величину полученного интеграла на предельно возможное значение мощности, передаваемой в энергосистему, формируют первый сигнал управления, пропорциональный разности полученного произведения и текущего приращения мощности турбогенератора, и второй сигнал управления, пропорциональный положительной величине указанного интеграла при.положительном значении первого сигнала, выделают максимальное значение из этих двух сигналов и по этому значению вместе с самими сигналами изменяют открытие клапанов и (|юрсируют возбуждение, если при возникновении положительного значения первого сигнала текущее приращение мопиюсти положительно.
2.Способ по п. I, отличающийся тем, что, с целью уменьшения погреишости формирования сигналов управления при изменении величины местной нагрузки и величины напряжения на шинах электростанции, предельно возможное значение мощности, передаваемой в энергосистему, определяют по отнесенной к ограниченному по минимуму относительному напряжению разности между текущим значением мощности турбогенератора и сигналом, эквивалентным местной нагрузке, величину которого задают заранее и корректируют сигналом, обеспечивающим полную компенсацию отличия текущего приращения мощности, отнесенного к предельно возможному значению мощности, передаваемой в энергосистему, от.линейной функции интеграла изменения частоты вращения, начиная с момента достижения первым сигналом заданной величины,
3.Способ по п.п. I и 2, о т личающийся тем, что, с целью уменьщения влияния колебаний частоты вращения в переходном процессе, второй .сигнал управления компенсируют сигналом, полученным от интегрирования его изменения с более высоким быстродействием для сигналов в сторону сброса наарузки, чем для сигналов в сторону нагрузки