Изобретение относится к электротехнике, а именно к устройствам для связи энергосистем, и может быть использовано для управления асинхро- низированным электромеханическим пре образователем частоты (АС ЭМПЧ).
Целью изобретения является повышение надежности работы энергосистем, объединенных посредством АС ЭМПЧ.
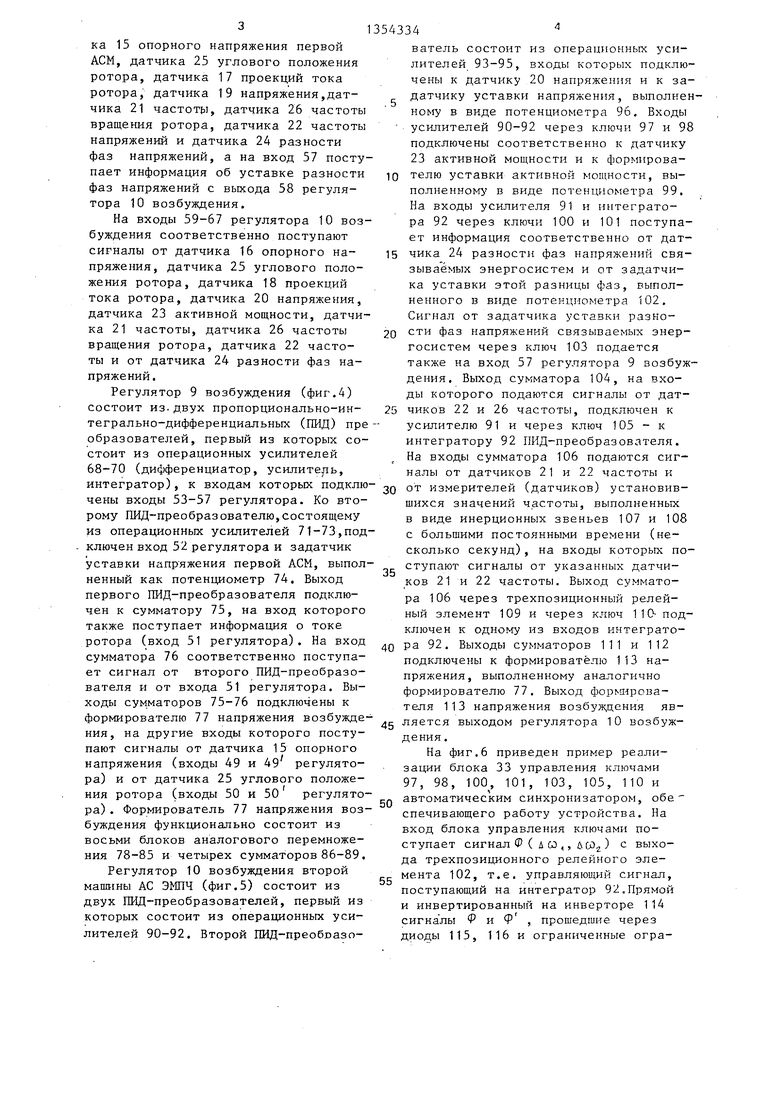
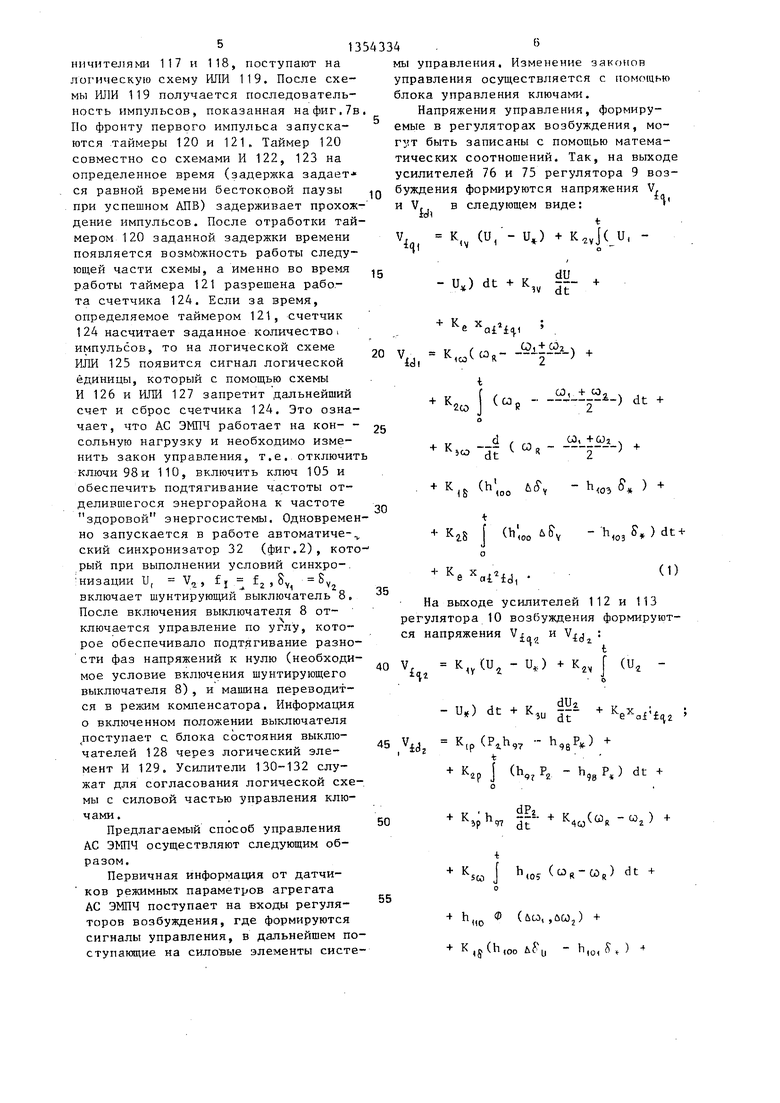
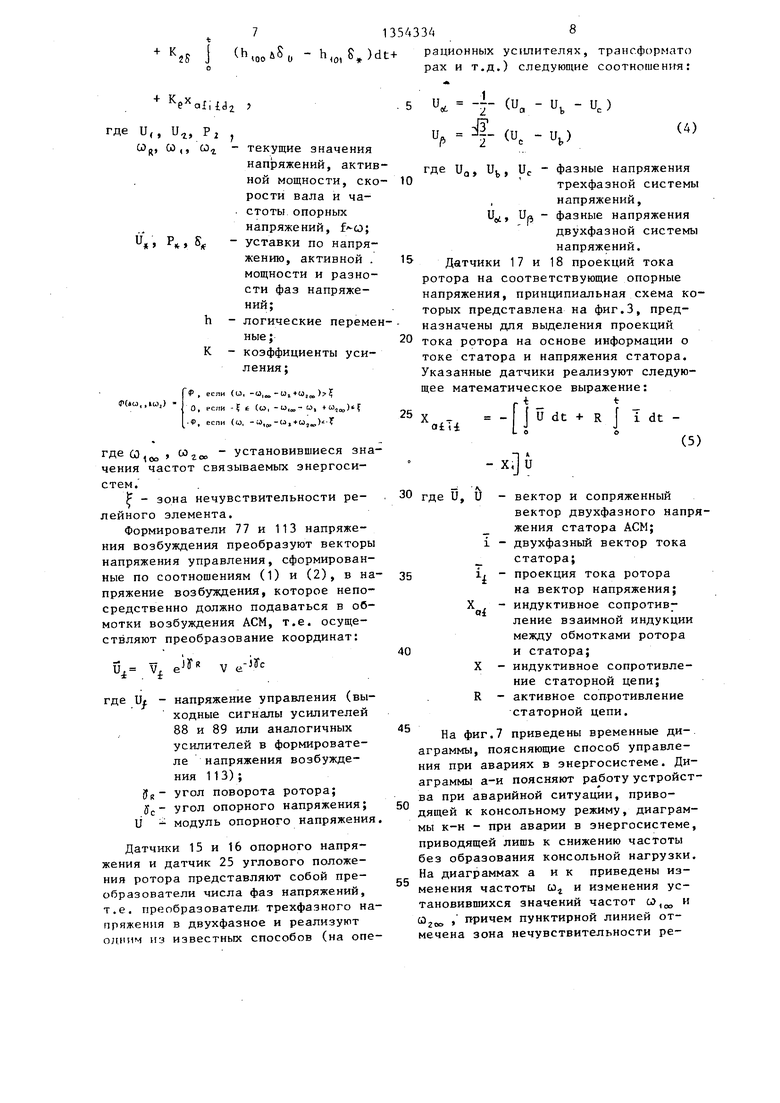
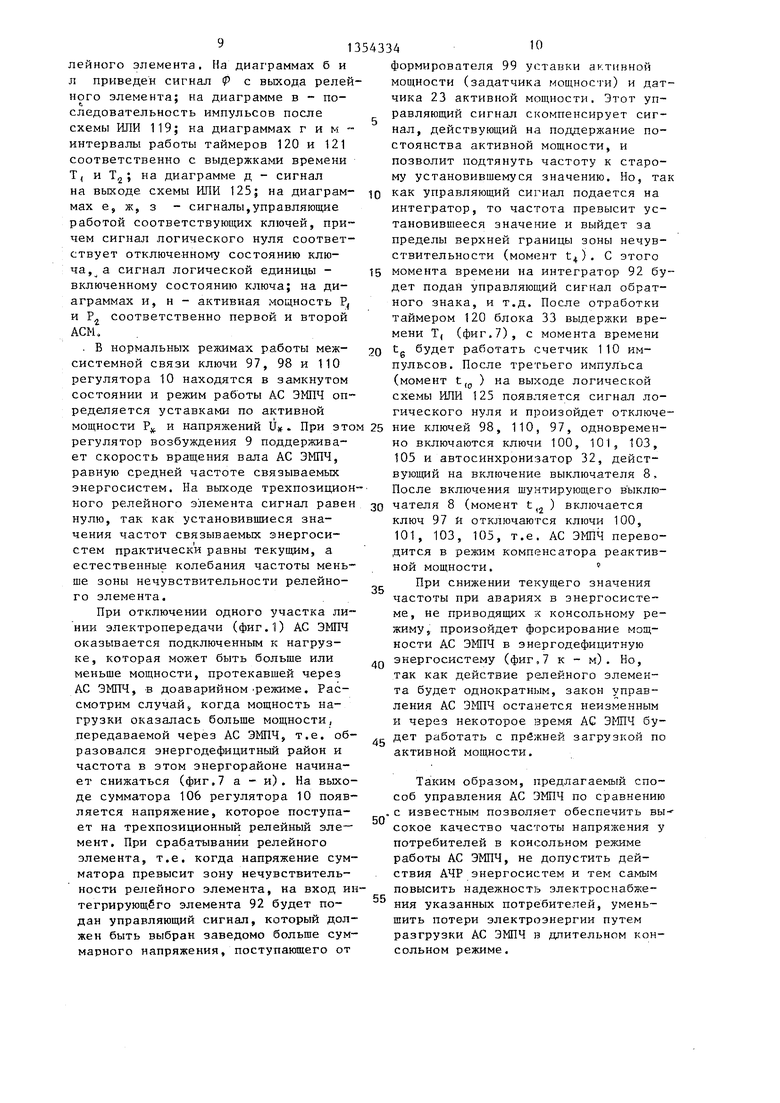
На фиг.1 приведена принципиальная схема энергосистемы с АС ЭМПЧ на фиг. 2 - принципиальная схема АС. ЭМПЧ; на фиг.З - датчик проекций тока ротора; на фиг.4 - структурная схема регулятора возбуждения первой по направлению перетока мощности машины АС ЭМПЧ; на фиг.5 - структурная схема регулятора возбуждения второй по направлению перетока мощности машины АС ЭМПЧ; на фиг.6 - принципиальная схема блока управления регулятором; на фиг.7 - временные диаграммы, поясняющие предлагаемый способ управления.
Две асинхронизированные синхронные машины (АСМ) 1 и 2 (фиг.2), соединенные общим валом 3, подключены через трансформаторы 4 и 5 связи в рассечку линии электропередачи (фиг.1), которая связывает две энергосистемы. Для подключения АСМ и шунтирования АС ЭШЧ имеются выключатели 6-8. Управление АС ЭМПЧ осуществляется посредством регуляторов 9 и 10 возбуждения, выходные сигналы которых управляют силовой частью системы управления, состоящей из преобразователей 11 и 12 частоты с непосредственной связью (ПЧНС) с системой импульсно-фазового управления тиристорами (СИФУ) и трансфор- . маторами 13 и 14 питания ПЧНС.
На входы регуляторов 9 и 10 возбуждения поступает информация от датчиков 15-26 режимных параметров , а именно: 15 и 16 - датчики опорных напряжений; 17 и 18 - датчики проекций токов ротора на опорные напряжения; 19 и 20 - датчики напряжений 21 и 22 - датчики частоты связываемых энергосистем, 23 - датчик активной мощности второй АСМ; 24 - датчик разности фаз напряжений связываемых энергосистем; 25 - датчик углового положения вала;-26 - датчик частоты вала. Указанные датчики подключены к измерительным трансфоома
торам 27 и 28 тока, к измерительным трансформаторам 29 и 30 напряжения и к угло-измерительной машине 31, находящейся на одном валу с АСМ.
Датчик 15 опорного напряжения, датчик 19 напряжения и датчик 21 частоты подключены к трансформатору напряжения 29, измеряющему напряжение на шинах первой АСМ, датчик 17 проекций тока ротора на опорное напряжение подключен к трансформатору напряжения первой АСМ. Соответственно датчик 16 опорного напряже- 5 ния, датчик 20 напряжения, датчик 22 частоты подключены к трансформатору 30 напряжения, измеряющему напряжение на шинах второй АСМ, датчик 18 проекций тока ротора на опорное 0 напряжение и датчик 23 активной мощности подключены к трансформатору 28 тока статора и трансформатору напряжения второй АСМ. Датчик 24 разности фаз напряжений связываемых 5 энергосистем подключен к обоим трансформаторам 29 и 30 напряжения. Датчик 25 углового положения ротора и датчик 28 частоты вращения ротора подключены к углоизмерительной ма- Q шине 31.
Шунтирование АС ЭМПЧ может осуществляться посредством выключателя 8, причем разрешение на включение указанного выключателя осуществляется с помощью автоматического синхронизатора 32. В систему управления АС ЭМПЧ входит блок управления ключами и автоматическим синхронизатором 33, осуществляющий переключение функций регулирования .На вход блока 33 поступает управляющий сигнал с выхода 34 регулятора 10 возбуждения.
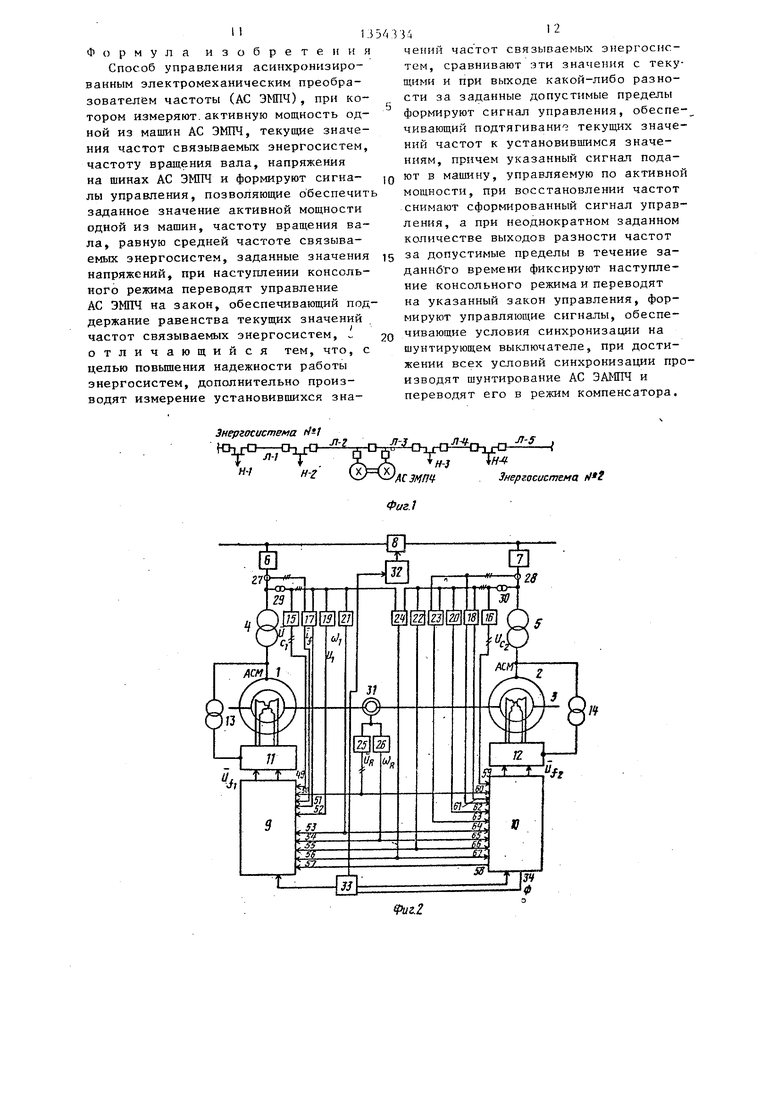
Датчик проекций тока ротора на опорное напряжение (фиг.З) состоит из преобразователя 35 трехфазного напряжения в двухфазное, из преобразователя 36 трехфазного тока в двухфазный, из двух интеграторов 37 и 38, двух инверторов 39 и 40 с соответствующими коэффициентами передачи, двух сумматоров 41 и 42, четырех аналоговых перемножителей 43-46 и двух выходных усилителей 47 и 48.
Первичная информация от датчиков режимных параметров поступает на входы регуляторов 9 и 10 возбуждения АС ЭМПЧ. Причем на входы 49-57 регулятора 9 возбуждения соответственно поступает информация от датчи5
0
5
0
55
3
ка 15 опорного напряжения первой АСМ, датчика 25 углового положения ротора, датчика 17 проекций тока ротора, датчика 19 напряжения,датчика 21 частоты, датчика 26 частоты вращения ротора, датчика 22 частоты напряжений и датчика 24 разности фаз напряжений, а на вход 57 поступает информация об уставке разности фаз напряжений с выхода 58 регулятора 10 возбуждения.
На входы 59-67 регулятора 10 возбуждения соответственно поступают сигналы от датчика 16 опорного напряжения, датчика 25 углового положения ротора, датчика 18 проекций тока ротора, датчика 20 напряжения, датчика 23 активной мощности, датчика 21 частоты, датчика 26 частоты вращения ротора, датчика 22 частоты и от датчика 24 разности фаз напряжений.
Регулятор 9 возбуждения (фиг.4) состоит из.двух пропорционально-ин- тегрально-дифференциальных (ПИД) пре образователей, первый из которых состоит из операционных усилителей 68-70 (дифференциатор, усилитель, интегратор), к входам которых подключены входы 53-57 регулятора. Ко второму ПИД-преобразователю,состоящему из операционных усилителей 71-73,подключен вход 52 регулятора и задатчик уставки напряжения первой АСМ, выполненный как потенциометр 74. Выход первого ПИД-преобразователя подключен к сумматору 75, на вход которого также поступает информация о токе ротора (вход 51 регулятора). На вход сумматора 76 соответственно поступает сигнал от второго ПИД-преобразователя и от входа 51 регулятора. Выходы сумматоров 75-76 подключены к формирователю 77 напряжения возбуждения, на другие входы которого поступают сигналы от датчика 15 опорного напряжения (входы 49 и 49 регулятора) и от датчика 25 углового положения ротора (входы 50 и 50 регулятора) . Формирователь 77 напряжения возбуждения функционально состоит из восьми блоков аналогового перемножения 78-85 и четырех сумматоров 86-89.
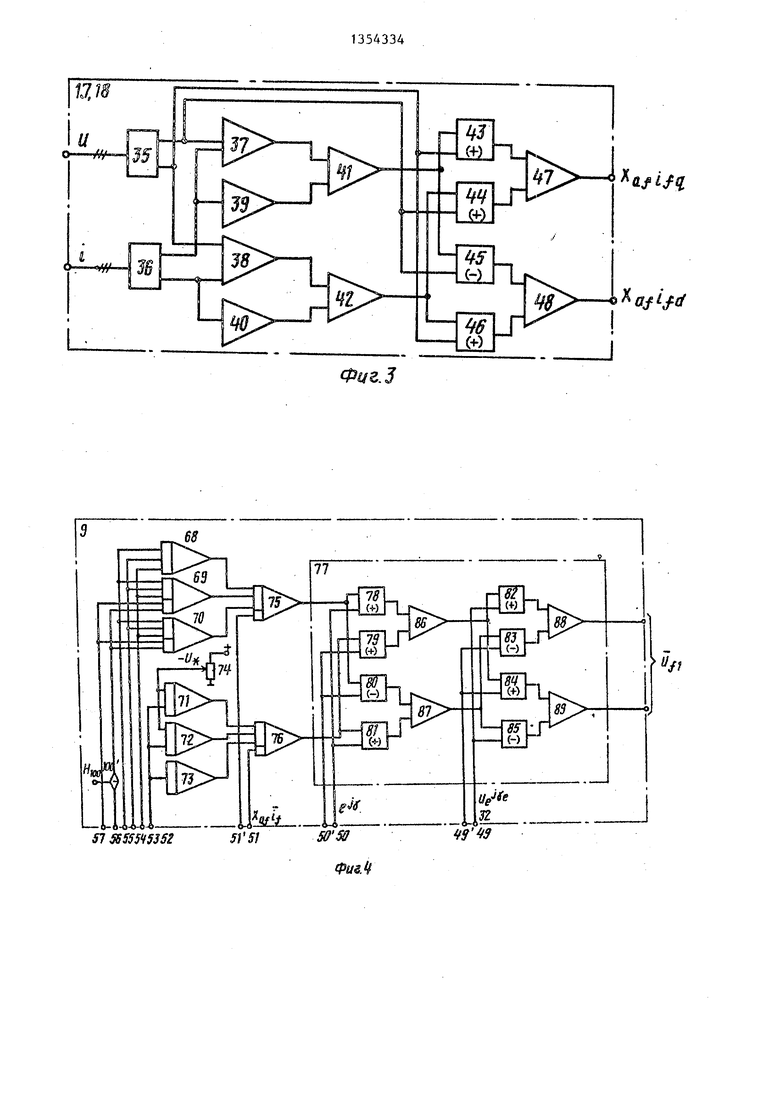
Регулятор 10 возбуждения второй машины АС ЭЖЧ (фиг.5) состоит из двух ГОЩ-преобразователей, первый из которых состоит из операционных усилителей 90-92. Второй ПИД-преобсазо54334
ватель состоит из операционных усилителей 93-95, входы которых подключены к датчику 20 напряжения и к за- датчику уставки напряжения, выполненному в виде потенциометра 96. Входы усилителей 90-92 через ключи 97 и 98 подключены соответственно к датчику 23 активной мощности и к формирова- 10 телю уставки активной мощности, выполненному в виде потенциометра 99. На входы усилителя 91 и интегратора 92 через ключи 100 и 101 поступает информация соответственно от дат- 15 чика 24 разности фаз напряжений связываемых энергосистем и от задатчи- ка уставки этой разницы фаз, выполненного в виде пoтeнциo eтpa 102. Сигнал от задатчика уставки разно20 сти фаз напряжений связываемых энергосистем через ключ 103 подается также на вход 57 регулятора 9 возбуждения. Выход сумматора 104, на входы которого подаются сигналы от дат- 25 чиков 22 и 26 частоты, подключен к усилителю 91 и через ключ 105 - к интегратору 92 ПИД-преобразователя. На входы сумматора 106 подаются сигналы от датчиков 21 и 22 частоты и
30 от измерителей (датчиков) установившихся значений частоты, выполненных в виде инерционных звеньев 107 и 108 с большими постоянными времени (несколько секунд), на входы которых поступают сигналы от указанных датчиков 21 и 22 частоты. Выход сумматора 106 через трехпозиционный релейный элемент 109 и через ключ 110- подключен к одному из входов интеграто40 ра 92. Выходы сумматоров 111 и 112 подключены к формирователю 113 напряжения, выполненному аналогично формирователю 77, Выход форьирова- теля 113 напряжения возбуж,цения яв45 ляется выходом регулятора 10 возбуждения .
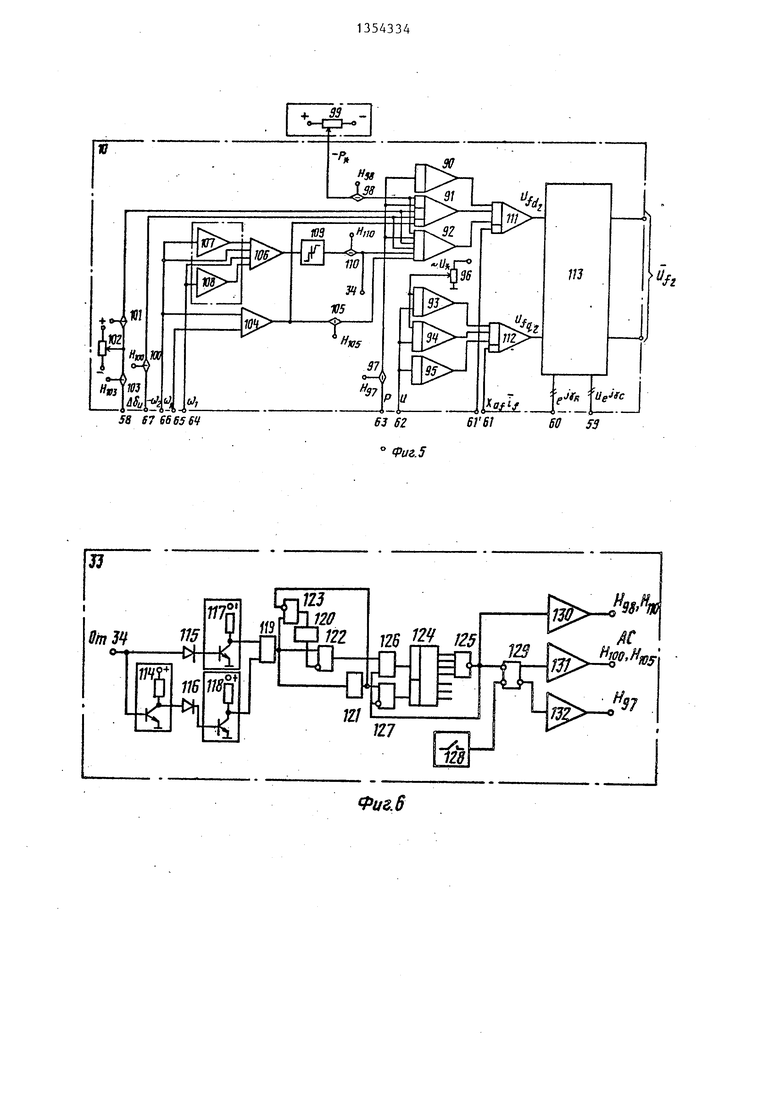
На фиг.6 приведен пример реализации блока 33 управления ключами 97, 98, 100, 101, 103, 105, 110 и
cQ автоматическим синхронизатором, обеспечивающего работу устройства. На вход блока управления ключами поступает сигнал Ф ( Д со ,, лоЭг - - выхода трехпозиционного релейного элеg мента 102, т.е. управляющий сигнал, поступающий на интегратор 92.Прямой и инвертированный на инверторе 114 сигналы Ф и Ф , прошедшие через диоды 115, 116 и ограниченные огра35
5
нпчителями 117 и 118, поступают на логическую схему ИЛИ 119. После схемы ИЛИ 119 получается последовательность импульсов, показанная нафиг,7в По фронту первого импульса запускаются таймеры 120 и 121, Таймер 120 совместно со схемами И 122, 123 на определенное время (задержка задает ся равной времени бестоковой паузы при успешном АПВ) задерживает прохож дение импульсов. После отработки таймером 1 20 заданной задержки времени появляется возможность работы следующей части схемы, а именно во время работы таймера 121 разрешена работа счетчика 124. Если за время, определяемое таймером 121, счетчик 124 насчитает заданное количествоi импульсов, то на логической схеме ИЛИ 125 появится сигнал логической единицы, который с помощью схемы И 126 и ИЛИ 127 запретит дальнейший счет и сброс счетчика 124. Это означает, что АС ЭМПЧ работает на кон- - сольную нагрузку и необходимо изменить закон управления, т.е. отключит ключи 98 и 110, включить ключ 105 и обеспечить подтягивание частоты отделившегося энергорайона к частоте здоровой энергосистемы. Одновременно запускается в работе автоматиче- ский синхронизатор 32 (фиг.2), который при выполнении условий синхро-. низадии и, V, fj f 2 S v, v включает шунтирующий выключатель 8, После включения выключателя 8 отключается управление по углу, которое обеспечивало подтягивание разности фаз напряжений к нулю (необходимое условие включения шунтирующего выключателя 8), и машина переводится в режим компенсатора. Информация о включенном положении выключателя поступает с блока состояния выключателей 128 через логический элемент И 129. Усилители 130-132 служат для согласования логической схемы с силовой частью управления ключами.
Предлагаемый способ управления АС ЭШЧ осуществляют следующим образом.
Первичная информация от датчиков режимных параметров агрегата АС ЭМПЧ поступает на входы регуляторов возбуждения, где формируются сигналы управления, в дальнейшем поступающие на силовые элементы систе13
4334 .«
мы управления. Изменение законов управления осуществляется с помощью блока управления ключами.
Напряжения управления, формируемые в регуляторах возбуждения, могут быть записаны с помощью математических соотношений. Так, на выходе усилителей 76 и 75 регулятора 9 возбуждения формируются напряжения V.
10
и V
idi
в следующем виде:
fv
ц.
5,, си/- и) + к,( и. V
id)
К
1СД
(,, .9il«.)
к
2СО
(Cjg СО, + со
i
) dt +
+ к
5СО
d dt
-- (со,СО, +Wz
) +
(h Л,
оз
) +
K.S J
35
- ,
На выходе усилителей 112 и 113 регулятора 10 возбуждения формируются напряжения V
И V
«,
V,
Цг
к,/(и
-и.) + к
г
(и.
46 V,
а.
К
SM
tOi
(R-WR)
dt +
h
(0
K,j(h
(uco, ,uco,,) +
0 l(0 )
+ К
2S
(h,,iS, - , S,)dt+
.id
со, со
де и,, и, Р, J
со текущие значения
напряжений, активной мощности, скорости вала и частоты опорных напряжений, S - уставки по напряжению, активной . мощности и разности фаз напряжений;
h - логические переменные ;
- коэффициенты усиления;
UV:
, Р.,
К
|Г(«ы, ,и,)
Р если (Ui ( Ui+Ci)jj ) О, если -ft (о, -и,„- W, ,„)( Ф, еспи (о, -и),„-о, + ы,„);
где СО , cOjoo - установившиеся значения частот связываемых энергосистем.
- зона нечувствительности релейного элемента.
Формирователи 77 и 113 напряжения возбуждения преобразуют векторы напряжения управления, сформированные по соотношениям (1) и (2), в напряжение возбуждения, которое непосредственно должно подаваться в обмотки возбуждения АСМ, т.е. осуществляют преобразование координат:
и v eJI V егде и - напряжение управления (выходные сигналы усилителей 88 и 89 или аналогичных усилителей в формирователе напряжения возбуждения 113);
5,,- угол поворота ротора; ffj- угол опорного напряжения; li модуль опорного напряжения
Датчики 15 и 16 опорного напряжения и датчик 25 углового положения ротора представляют собой преобразователи числа фаз напряжений, т.е. преобразователи, трехфазного напряжения в двухфазное и реализуют одням из известных способов (на операционных ус шителях, трансформато pax и т.д.) следуюп1ие соотношения:
и --- (и„ - и, - и,)
2
(и. - и,)
(4)
где UQ, Ujj, Uc фазные напряжения трехфазной системы
напряжений,
oi % фазные напряжения двухфазной системы напряжений.
Датчики 17 и 18 проекций тока ротора на соответствующие опорные напряжения, принципиальная схема которых представлена на фиг.З, предназначены для выделения проекций 20 тока ротора на основе информации о токе статора и напряжения статора. Указанные датчики реализуют следующее математическое выражение: t t
25
X
. R J idt (5)
- X, и
30 где и, и - вектор и сопряженный
вектор двухфазного напря- жения статора АСМ; i - двухфазный вектор тока статора;
5 i - проекция тока ротора на вектор напряжения; X - индуктивное сопротивление взаимной индукции между обмотками ротора 0и статора;
X - индуктивное сопротивление статорной цепи; R - активное сопротивление статорной цепи.
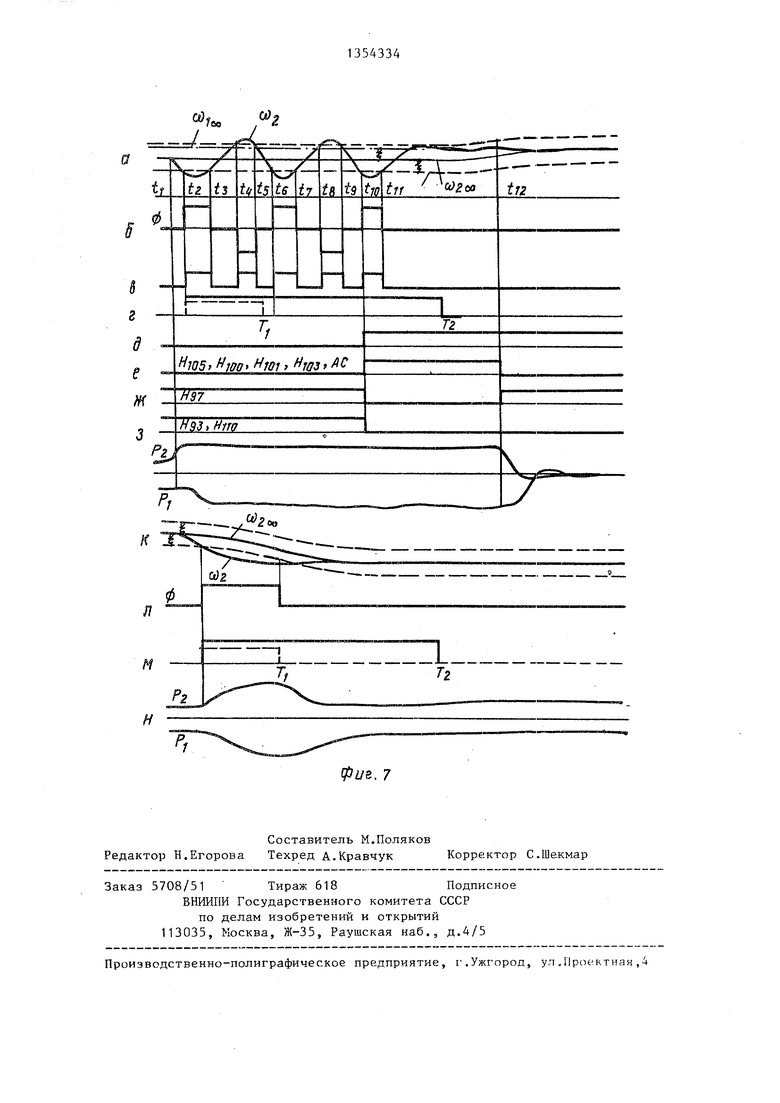
4 На фиг.7 приведены временные диаграммы, поясняющие способ управления при авариях в энергосистеме. Диаграммы а-и поясняют работу устройства при аварийной ситуации, приводящей к консольному режиму, диаграммы к-н - при аварии в энергосистеме, приводящей лишь к снижению частоты без образования консольной нагрузки. На диаграммах а и к приведены изменения частоты coj и изменения установившихся значений частот CjJ, и причем пунктирной линией отмечена зона нечувствительности ре0
5
лейного элемента. На диаг раммах б и л приведен сигнал Р с выхода релейного элемента; на диаграмме в - последовательность импульсов после схемы ИЛИ 119; на диаграммах г и м - интервалы работы таймеров 120 и 121 соответственно с выдержками времени Т, и на диаграмме д - сигнал на выходе схемы ИЛИ 125; на диаграммах е, ж, 3 - сигналы,управляющие работой соответствующих ключей, причем сигнал логического нуля соответствует отключенному состоянию ключа, а сигнал логической единицы - включенному состоянию ключа; на диаграммах и, н - активная мощность Р, и P,j соответственно первой и второй АСМ.
. В нормальных режимах работы межсистемной связи ключи 97, 98 и 110 регулятора 10 находятся в замкнутом состоянии и режим работы АС ЭМПЧ определяется уставками по активной
мощности Р и напряжений U. При этом 25 ние ключей 98, 110, 97, одновременрегулятор возбуждения 9 поддерживает скорость вращения вала АС ЭМПЧ, равную средней частоте связываемых энергосистем. На выходе трехпозицион ного релейного элемента сигнал равен нулю, так как установившиеся значения частот связываемых энергосистем практически равны текущим, а естественные колебания частоты меньше зоны нечувствительности релейного элемента.
При отключении одного участка ли- нии электропередачи (фиг.1) АС ЭМПЧ оказывается подключенным к нагрузке, которая может быть больше или меньше мощности, протекавшей через АС ЭМПЧ, в доаварийном режиме. Рассмотрим случайJ когда мощность нагрузки оказалась больше мощности, передаваемой через АС ЭМПЧ, т.е. образовался энергодефицитный район и частота в этом энергорайоне начинает снижаться (фиг.7 а - и). На выходе сумматора 106 регулятора 10 появляется напряжение, которое поступает на трехпозиционный релейный элемент. При срабатывании релейного элемента, т.е. когда напряжение сумматора превысит зону нечувствительности релейного элемента, на вход интегрирующего элемента 92 будет подан управляющий сигнал, который должен быть выбран заведомо больше суммарного напряжения, поступающего от
формирователя 99 уставки активной мощности (задатчика мощности) и датчика 23 активной мощности. Этот управляющий сигнал скомпенсирует сигнал, действующий на поддержание постоянства активной мощности, и позволит подтянуть частоту к старому установившемуся значению. Но, так
как управляющий сигнал подается на интегратор, то частота превысит установившееся значение и выйдет за пределы верхней границы зоны нечувствительности (момент t). С этого
момента времени на интегратор 92 будет подан управляющий сигнал обратного знака, и т.д. После отработки таймером 120 блока 33 выдержки времени Т( (фиг.7), с момента времени
tg будет работать счетчик 110 им- пулБСов. После третьего импульса (момент t,p ) на выходе логической схемы ИЛИ 125 появляется сигнал логического нуля и произойдет отключе
но включаются ключи 100, 101, 103, 105 и автосинхронизатор 32, действующий на вкл очение выключателя 8, После включения шунтирующего в ыклю- чателя 8 (момент t, ) включается
ключ 97 и отключаются ключи 100, 101, 103, 105, т.е. АС ЭМПЧ переводится в режим компенсатора реактивной мощности.
При снижении текущего значения частоты при авариях в энергосистеме, не приводящих к консольному режиму, произойдет форсирование мощности АС ЭМПЧ в энергодефицитную энергосистему (фиг,7 к - м). Но, так как действие релейного элемента будет однократным, закон управления АС ЭМПЧ останется неизменным и через некоторое время АС ЭМПЧ бу- дет работать с прежней загрузкой по активной мощности.
Таким образом, предлагаемый способ управления АС ЭМПЧ по сравнению с известным позволяет обеспечить вы сокое качество частоты напряжения у потребителей в консольном режиме работы АС ЭМПЧ, не допустить действия АЧР энергосистем и тем самым повысить надежность электроснабжения указанных потребителей, уменьшить потери электроэнергии путем разгрузки АС ЭМПЧ в длительном консольном режиме.
50
55
13
Формула изобретения
Способ управления асинхронизиро- ванным электромеханическим преобразователем частоты (АС ЭМПЧ), при котором измеряют, активную мощность одной из машин АС , текущие значения частот связываемых энергосистем, частоту вращения вала, напряжения на шинах АС ЭМПЧ и формируют сигна- лы управления, позволяющие обеспечить заданное значение активной мощности одной из машин, частоту вращения вала, равную средней частоте связываемых энергосистем, заданные значения напряжений, при наступлении консольного режима переводят управление АС ЭМПЧ на закон, обеспечивающий поддержание равенства текущих значений
частот связываемых энергосистем, „ отличающийся тем, что, целью повышения надежности работы энергосистем, дополнительно производят измерение установившихся знаЭнергосистема
НЭтгО--OTJQ . Н7 Т . Х/Ч
V94i ;lf 7Afff//7л
Эн
5
0
341 2
чеиий частот связываемых энергосистем, сравнивают эти значения с текущими и при выходе какой-либо разности за заданные допустимые пределы формируют сигнал управления, обеспе- чивающий подтягивани э текущих значений частот к установившимся значениям, причем указанный сигнал подают в машину, управляемую по активной мощности, при восстановлении частот снимают сформированный сигнал управления, а при неоднократном заданном количестве выходов разности частот за допустимые пределы в течение за- даннб го времени фиксируют наступление консольного режима и переводят на указанный закон управления, формируют управляющие сигналы, обеспечивающие условия синхронизации на шунтирующем выключателе, при достижении всех условий синхронизации производят шунтирование АС ЭАМПЧ и переводят его в режим компенсатора.
Jf-f
Ч
;lf 7Afff//7л
Фиг.1
Энергосистема rt l
.
afi-J d
Фцг.З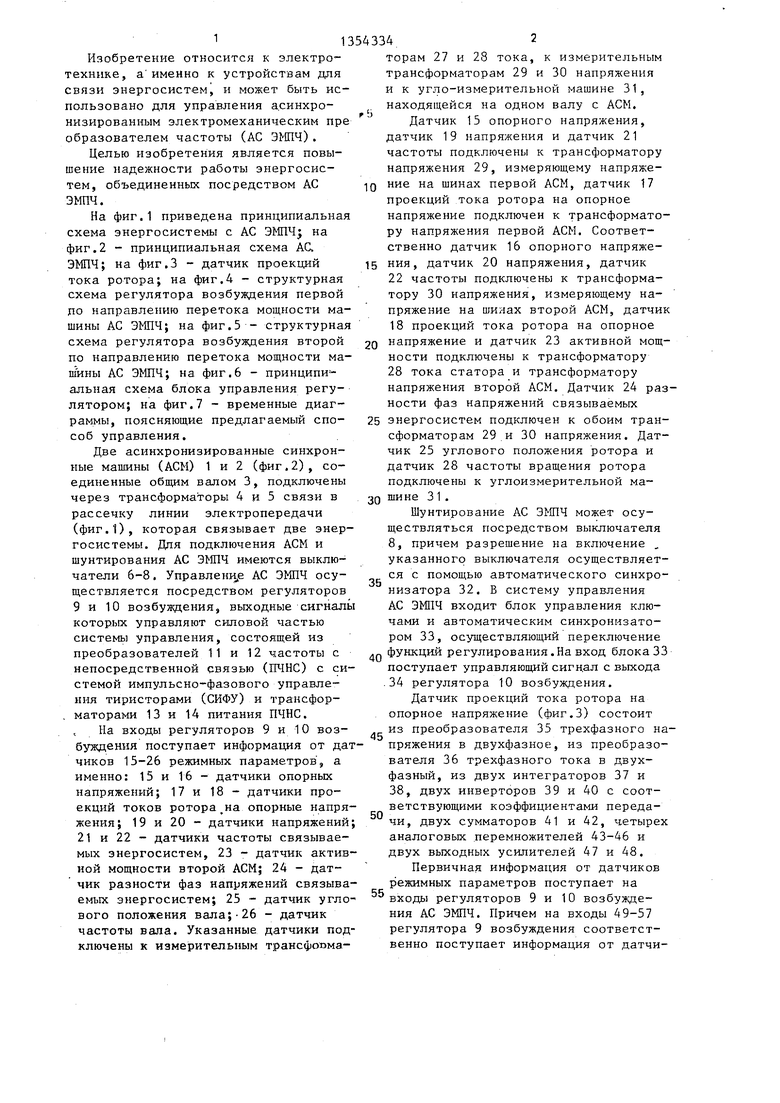
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
Изобретение относится к электротехнике. Цель изобретения - повышение надежности работы энергосистем. Управление асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем осуществляется по законам, позволяющим поддерживать заданные значения активной мощности одной из машин, частоту вращения вала и напряжений энергосистем. При наступлении консольного режима переводят управление на закон, обеспечивающий поддержание равенства частот связываемых энергосистем. Для фиксирования факта наступления консольного режима производят измерение установившихся значений частот энергосистем, сравнивают эти значения с текущими и при выходе какой-либо разности за заданные пределы формируют сигнал управления, обеспечивающий подтягивание текуш;их значений частот к установившимся значениям. При неоднократном формировании указанного сигнала фиксируют наступление консольного режима. В длительном консольном режиме шунтируют устройство для связи энергосистем. 7 ил. i С/5 О1 4; со со ийь
SI SS5554S35Z
srsi
50 SO
58 67666564
63 62 ° Фиг.5
Istf/... ВГ6160 f3
иг.6
ts
UL
tjf
(гся
tu
L
%5 Ю1 %J
W
HW
n
7/5J7AVW
9&i/e. 7
Составитель М.Поляков Редактор Н.Егорова Техред А.Кравчук Корректор С.Шекмар
Заказ 5708/51 Тираж 618Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Закладочный трубопровод | 1951 |
|
SU112740A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Зеленохат Н.И.., Кокорев Н,А | |||
| , Ла- казоБ К.З | |||
| Управление режимами гибкой межсистемной связи с АС ЭМПЧ | |||
| Рукопись депонирована в Информэнер- го, 1983, № 1348 эн - Д83, 37 с. | |||
