1
Изобретение относится к области электротехники, а именно к технике управления позиционными электроприводами.
Известно устройство для управления электроприводом драглайна, содержащее установленные на краях стрелы датчики положения рабочего органа (вращающийся трансформатор и однофазные сельсины) и узел измерения его отклонения от заданного положения, выполненный на операционном усилителе.
Это устройство предназначено для регулирования положения рабочего органа относительно границы его саморазгрузки и удовлетворяет предъявляемым при этом требованиям точности и надежности регулирования.
Однако, когда требования к устройству повышаются (например, при ограничении положения рабочего органа границей аварийной зоны вблизи стрелы), точность и надежность управления оказывается недостаточной. Это определяется недостаточной чувствительностью измерительной части устройства, влиянием колебаний питающего напряжения и температуры среды, которые в условиях работы драглайна достаточно велики, а также тем, что в устройстве не учитывается скорость приводов при приближении рабочего органа к заданному положению, вследствие чего при больших скоростях приводов неизбежен выход рабочего органа за пределы заданного граничного положения, что может привести к аварии.
Целью изобретения является повышение надежности и точности регулирования положения рабочего органа.
Это достигается тем, что в качестве датчика положения рабочего органа использованы последовательно соединенные дифференциальный и бесконтактный однофазный сельсины. Первичная обмотка дифференциального сельсина подключена к трехфазной сети переменного тока, а узел измерения отклонения содержит на входе два нуль-органа, выход первого из которых через статический триггер и дифференцирующее звено, а выход второго непосредственно связаны с селектором импульсов. Выход последнего через два управляющих триггера подключен в цепь управления приводом. При этом вход одного нульоргана соединен с однофазной обмоткой однофазного сельсина, вход другого нуль-органа подключен через фазовращатель на однофазное напряжение. Управляющий вход статического триггера узла измерения отклонения с одной стороны через компаратор и суммирующий усилитель соединен с датчиками скорости, а с другой стороны через компаратор и генератор пилообразного напряжения - с
выходом первого нуль-органа.
При этом датчик обеспечивает преобразование координат положения рабочего органа в пропорциональное им изменение фазы выходного напряжения, точность которого может достигать нескольких угловых минут, что заведомо удовлетворяет предъявляемым к устройству требованиям и существенно превышает возможности датчиков известных устройств, преобразующих координаты в величину напряжения. Колебания напряжения сети и изменение температуры среды практически не скажутся на точности измерения. Это повышает точность и надежность регулирования.
Два нуль-органа, селектор импульсов и два управлящих триггера обеспечивают преобразование фазы во временной интервал (длительность выходного импульса) каждую половину периода питающего напряжения, что повышает чувствительность устройства, а вместе с тем точность и надежность регулирования.
Статический триггер с дифференцирующим звеном и компаратор, соединенный с генератором пилообразного напряжения, а также с датчиками скорости через суммирующий усилитель, обеспечивают учет скорости приближения рабочего органа к заданному положению и исключают возможность его выхода в аварийную зону, что также увеличивает надежность регулирования.
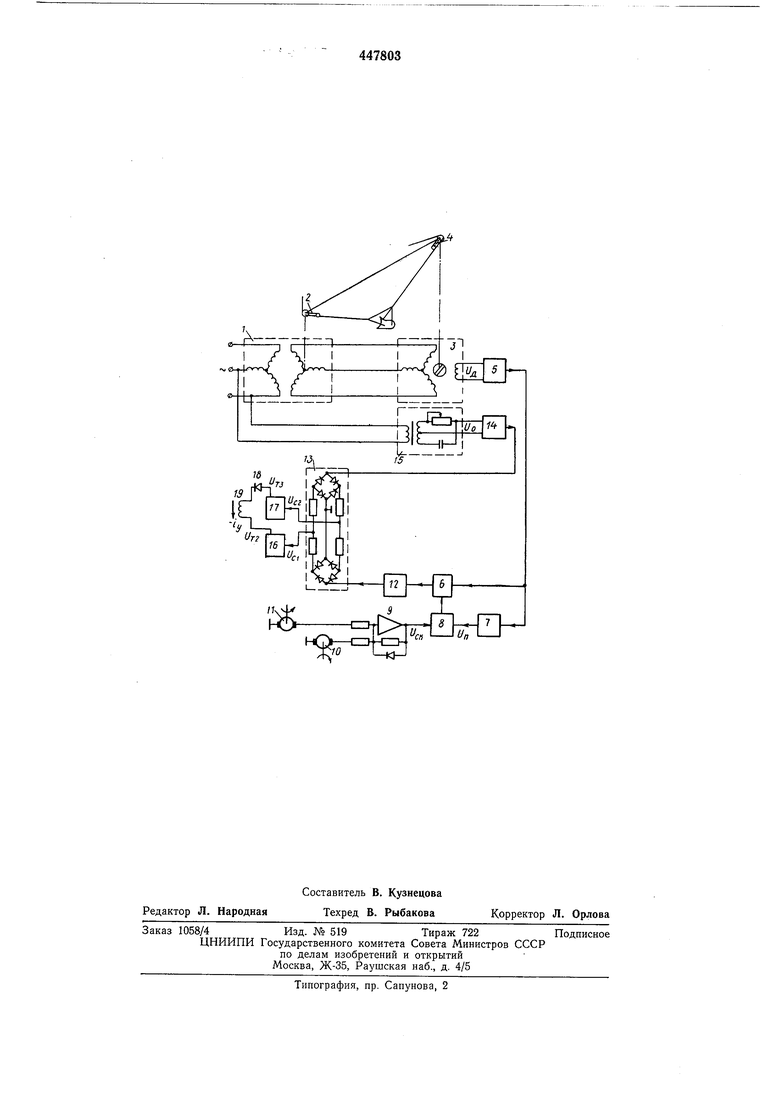
На чертеже изображено предлагаемое устройство
Дифференциальный сельсин 1 установлен у основания стрелы, его вал соединен с шатуном 2, другой конец которого связан с тяговым канатом. Сельсин 3 установлен на вершине стрелы и его вал связан с шатуном 4, другой конец которого связан с подъемным канатом.
На первичную трехфазную обмотку дифференциального сельсина 1 подключено трехфазное напряжение, а его вторичная обмотка соединена с трехфазной обмоткой сельсина 3. Однофазная обмотка сельсина 3 подключена на вход первого нуль-органа 5, формирующего импульсы при переходе через нуль мгновенного значения синусоидального напряжения, подаваемого с выхода сельсина 3. Выход нуль-органа 5 подключен на вход первого статического триггера 6 и генератора пилообразного напряжения 7, выход которого подключен на первый вход компаратора 8.
На второй вход компаратора 8 подключен выход суммирующего операционного усилителя 9, на два входа которого подключены два датчика скорости (например, тахогенераторы) 10 и И приводов подъема и тяги.
Выход компаратора 8 подключен на счетный вход первого статического триггера 6, а выход триггера соединен со входом дифференцирующего звена 12, выход которой подключен на первый вход селектора импульсов 13, состоящего из двух диодных мостов, соединенных через четыре одинаковых резистора. На
второй вход селектора импульсов подключен выход второго нуль-органа 14, формирующего импульсы при переходе через нуль мгновенного значения синусоидального напряжения, а
вход нуль-органа 14 иодключен через фазовращающий узел 15 к однофазному напряжению.
Первый выход селектора импульсов 13 подключен на вход статического управляющего
триггера 16, второй выход - на вход статического управляющего триггера 17, а выходы этих триггеров через диод 18 соединены с зажимами обмотки 19 управления приводом. Описываемое устройство работает следующим образом.
При перемещении рабочего органа углы поворота шатунов 2 и 4 и валов сельсинов 1 и 3 соответствуют направлеииям иодъемного и тягового канатов, в результате фаза выходного
напряжения (/д, снимаемого с однофазной обмотки сельсина 3 и изменяющегося пропорционально сумме углов поворота валов сельсинов 1 и 3, соответствует положению рабочего органа. Эта фаза фиксируется с помощью импульсов, формируемых нуль-органом 5 при переходе через нуль мгновенного значения этого синусоидального напряжения.
Фаза опорного напряжения Uo, фиксируемая с помош,ью нуль-органа 14 и регулируемая с помощью фазовращающего узла 15, соответствует заданному положению рабочего органа.
Временной интервал между имиульсами, поступающими с нуль-органов 5 и 14, пропорционален отклонению положения рабочего органа от заданного положения.
Генератор пилообразного напряжения 7, компаратор 8 и суммирующий операционный усилитель 9, на два входа которого подключены два датчика скорости 10 и И, служат для измеиения сигнала управления приводом пропорционально скорости приводов подъема и тяги. Генератор пилообразного напряжения 7 запускается при появлении имиульса на выходе нуль-органа 5. Когда напряжение U на выходе генератора 7 достигнет величины выходного напряжения операционного усилителя 9, пропорционального сумме скоростей приводов подъема и тяги, на выходе компаратора 8 появляется импульс, который перебрасывает статический триггер 6 в состояние, противоположное тому, в которое он был переведен после поступления импульса с выхода нуль-органа 5.
Интервал времени между импульсами с нуль-органа 5 и компаратора 8 пропорционален требуемому изменению управляющего сигнала в зависимости от скорости приводов. Дифференцирующее звено 12 днфференцирует задний фронт прямоугольного импульса с триггера 6 в момент поступления на его счетный вход короткого импульса с выхода компаратора 8. Таким образом, интервал времени между импульсами на выходах дифференцирующего звена 12 и нуль-органа 14 соответствует величине управляющего сигнала привода, равного разности отклонения рабочего органа от заданного положения и изменения управляющего сигнала пропорционально скорости приводов (при отрицательном значении этой разности).
Селектор импульсов 13 обеспечивает поступление на вход управляющего триггера 16 положительных импульсов с выхода дифференцирующего звена 12 и отрицательных импульсов с выхода нуль-органа 14, а на вход управляющего триггера 17 - импульсов противопложной полярности с выхода этих элементов. В результате на протяжении каждого полупериода опорного синусоидального напряжения t/o разность Ut2-U-ia длительностей прямоугольных импульсов напряжения на выходах триггеров 16 и 17 пропорциональна величине управляющего сигнала привода, равного разности отклонения рабочего органа от заданного положения и изменения управляющего сигнала пропорционально скорости приводов.
Если рабочий орган находится на больщом расстоянии от заданного положения, разность Ufz--Uf3 выходных напряжений триггеров 16 и 17 положительна, диод 18 закрыт, сигнал на привод не поступает и не ограничивает скорости приводов и перемещаемого ими рабочего органа.
При приближении рабочего органа к заданному положению величина (7т2-UTS становится отрицательной, диод 18 открывается и на приводы поступает сигнал, обеспечивающий их замедление и остановку рабочего органа в заданном положении без перерегулирований.
При этом по мере уменьшения отклонения рабочего органа от заданного положения уменьшается и скорость приводов, а при сов6
мещении положения рабочего органа с заданным прекращается дальнейшее его движение за заданное граничное положение и сигнал на выходе устройства отсутствует.
Предмет изобретения
Устройство для управления электроприводом, например тяги, грузоподъемного механизма, содержащее установленные на краях стрелы датчики положения рабочего органа, узел измерения отклонения положения рабочего органа от заданного, датчики скорости вращения двигателей тяги и подъема, усилитель и компаратор, отличающееся тем, что, с целью повышения надежности и точности регулирования, датчик положения выполнен в виде двух сельсинов, дифференциального и однофазного, узел измерения отклонения
содержит на входе два нуль-органа, выход одного из которых через триггер и дифференцирующее звено, а выход другого непосредственно связаны с селектором импульсов, выход которого через триггеры подключен в цепь управления приводом, при этом вход одного нуль-органа соединен с однофазной обмоткой однофазного сельсина, трехфазная обмотка которого соединена с выходной обмоткой дифференциального сельсина, первичная трехфазная обмотка которого подключена к сети переменного тока, вход другого нуль-органа подключен через фазовращатель на однофазное напряжение, и управляющий вход триггера узла измерения отклонения с одной стороны через компаратор и суммирующий усилитель соединен с датчиками скорости, а с другой через компаратор и генератор пилообразного напряжения - с выходом нервого нуль-органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU903803A2 |
| Устройство управления питателемВЕСОВОгО пОРциОННОгО дОзАТОРА | 1979 |
|
SU851108A1 |
| Стабилизированный источник постоянного напряжения | 1985 |
|
SU1309012A1 |
| Преобразователь угла поворота вала в напряжение | 1984 |
|
SU1193807A1 |
| Устройство управления весовым порционным дозатором | 1975 |
|
SU523301A1 |
| Однофазный стабилизатор напряжения | 2024 |
|
RU2829483C1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| Датчик скорости, направления вращения и углового положения вала | 1988 |
|
SU1654972A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для управления однофазным автономным инвертором | 1987 |
|
SU1615845A1 |